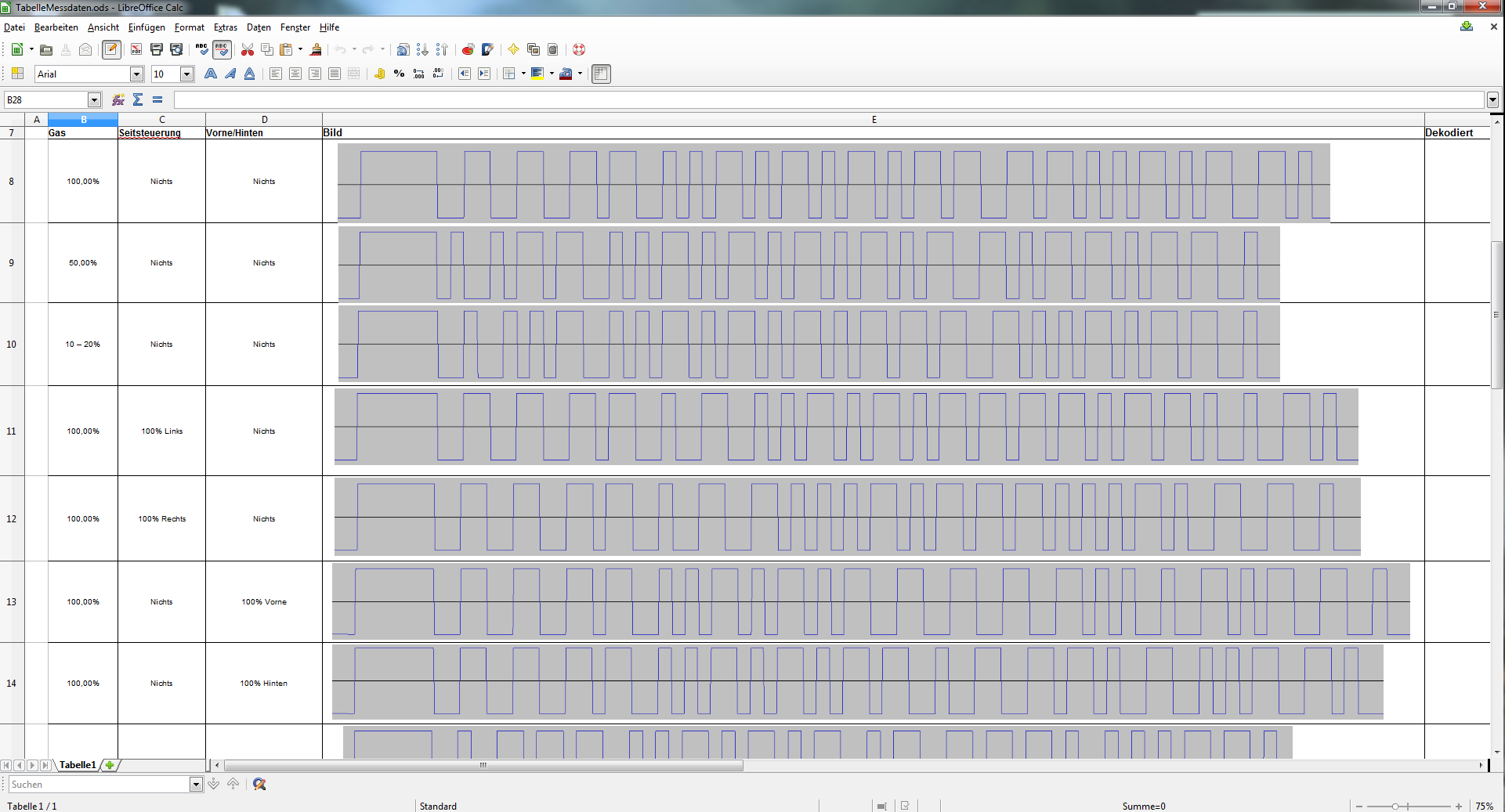
Guten Abend, ich sitze gerade daran, ein Infrarot-Protokoll zu reversen und hab mir hierfür mithilfe einer IR-LED, eines 3,5mm Klinkenkabels und eines Mikrofoneingangs einen IR-Receiver gebaut. Nach einigen Messungen, stellen sich mir nun zwei Fragen, die geklärt sein müssten, um das Protokoll zu verstehen. Als Anhang ein Screenshot meiner Excel-Tabelle. Die erste Frage: Um welche Kodierung handelt es sich? Da ich genau 2 verschiedene Längen an "Höhen" und "Tiefen" habe, die sich genau im Faktor 2 unterscheiden (21 bzw. 42 "Samples"), dachte ich zuerst an einen Manchester-Code, nach kurzem Ausprobieren sah es dann aber eher so aus, als handele es sich um einen Biphase-Mark-Code (BMC), weil bei ersten, manuellen Dekodierungsversuchen die Flanken sonst nicht mehr gepasst hätten. Liege ich damit richtig? Bevor ich dann anfange, da manuell zu zählen, wollte ich eine Meinung von Fachmännern einholen. :) Zweite Frage: Angenommen, es handele sich um eine BMC-Kodierung, so wäre jedes Bit doch in konstanter Zeit kodiert, die Messungen müssten also auch gleich lang sein. Die Frage lautet also: Warum sind die verschiedenen Messungen unterschiedlich lang? Woher weiß das Empfangsgerät dann, um welchen Wert es sich ab wann handelt, wenn es nicht eine konstante Bitzahl ist? Kann es ein Grenzpattern geben und wenn ja, wäre das nicht viel zu ineffizient, weil alleine das Pattern mehrere Bits verbraucht? Vielen Dank schon einmal im Voraus, Eff Edit: Wann nach dem Startbit sollte man denn das Dekodieren anfangen? Direkt, oder? Beginnt die erste Messung also mit 0, 0, 0, 0.... (wenn 0 = kein Übergang) oder mit 1, 1, 1, 1...?
Angehängte Dateien:
-

Screenshot1.png
96 KB
Eff v. X. schrieb: > ich sitze gerade daran, ein Infrarot-Protokoll zu reversen Du kennst www.mikrocontroller.net/articles/IRMP ? Gruss Harald
Ja, und ich fand ihn auch hilfreich. Es sieht aber so aus, als würde das verwendetes Protokoll nicht enthalten sein, was aber auch nicht verwundert, da es es sich nicht um eine der hier aufgeführten Firmen handelt, bzw. geht es überhaupt nicht um solch eine Fernbedienung für Fernseher, Boxen oder Receiver. Desweiteren versuche ich auch, das ohne µC hinzubekommen und bis hierhin sehen die Messwerte ja auch ziemlich gut aus, ich bräuchte nur noch etwas Hilfe bei der Interpretation. Gruß
Hi! Ein Begrenzungsmuster würde ich für unwahrscheinlich halten. Der lange Puls am Anfang scheint ja die Rahmen zu synchronisieren (hier wäre die Darstellung eines repetitierenden Musters interessant gewesen). Ob Manchester- oder BMC kann ich nicht spontan beantworten. Die unterschiedlichen Längen könnten jedoch davon herrühren, daß eine Lauflängenkodierung (RLE) verwandt wird. Ev. auch mit Checksumme am Ende. Ich würde die Datenfolgen erstmal nach Manchester- und BMC dekodieren und mir die Datenfolgen anschauen. Vielleicht kannst Du sie ja mal hier posten? Um was handelt es sich bei Deiner Übertragungsstrecke? Ist das für ein ferngesteuertes Auto? Gruß flipsi
Angehängte Dateien:
-

laengereFolge.png
6,4 KB
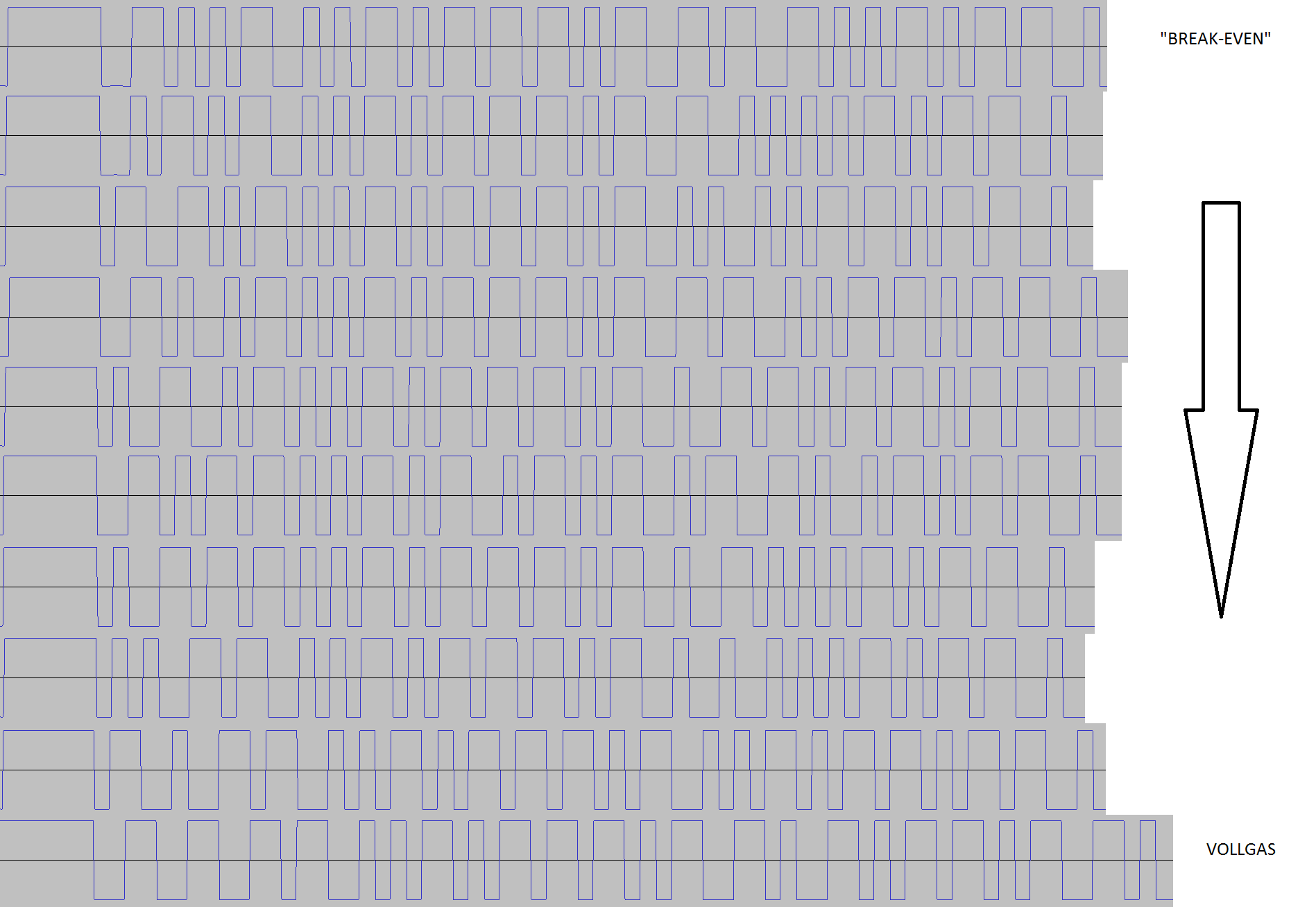
Okay, danke für den Tip mit der Lauflängenkodierung. Ich werde mich jetzt wohl also mal hinsetzen und mit BMC und Manchester versuchen, zu dekodieren. Es handelt sich dabei um einen 3-Kanal-RC-Helikopter mit Trim-Rädchen und Turbotaste. :) Ich hab gerade mal noch eine längere Zeitspanne aufgenommen. Es scheint so, als wären die Sendezeitpunkte recht unregelmäßig/willkürlich. Das Bild wurde bei konstantem Vollgas aufgenommen, sonst hab ich nichts geändert. Wenn ich andere Richtungen noch mitbewege, ändert sich aber - so wie es aussieht - wohl auch Nichts an der Unregelmäßigkeit. Ich melde mich dann wieder mit 1en und 0en. Gruß, Eff
Angehängte Dateien:
-

KeinManchester.png
130 KB -

KeinManchester2.png
140 KB -

Dekodiert.png
96 KB
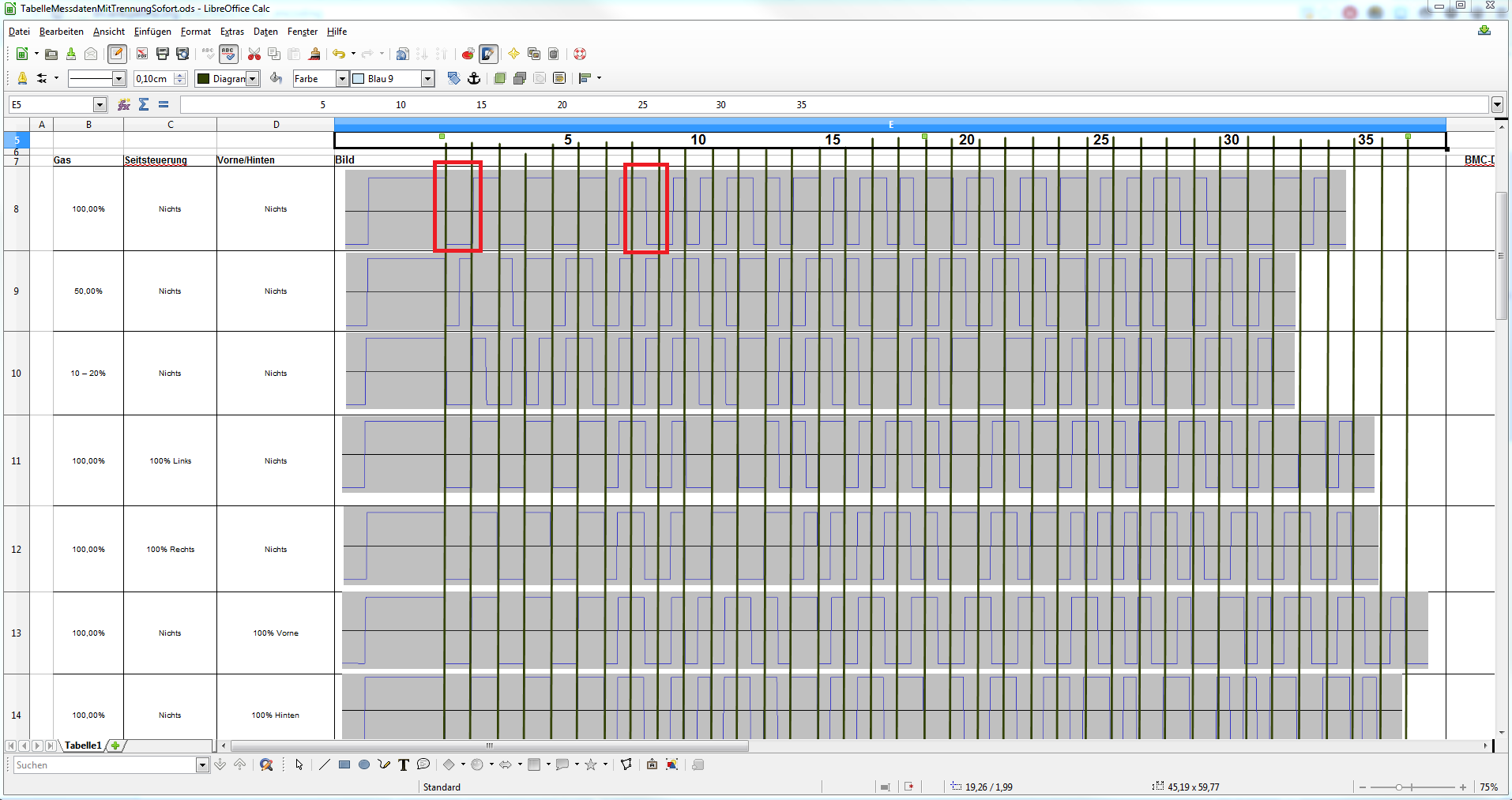
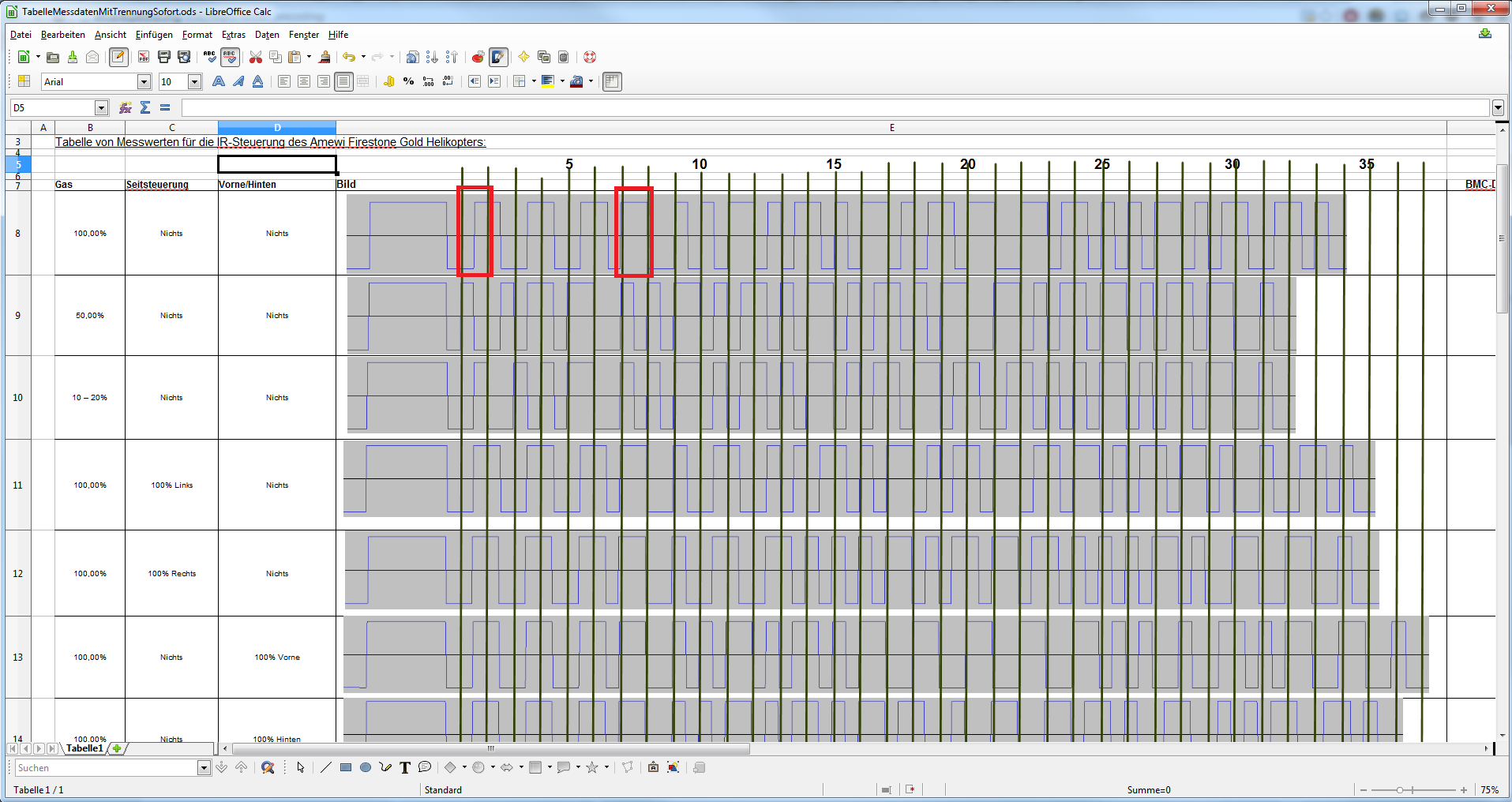
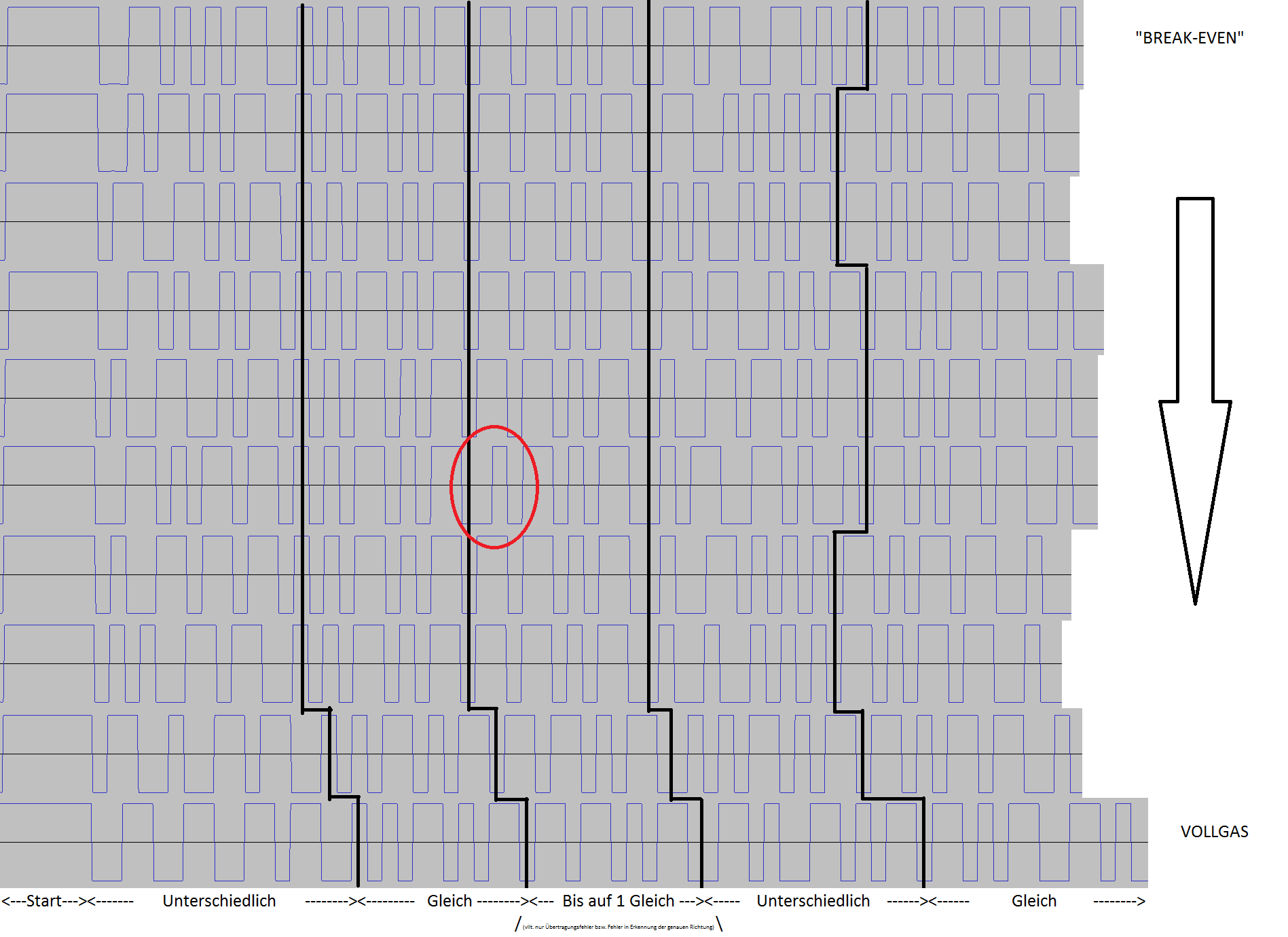
So, ich habe mich jetzt mal drangesetzt und versucht, das zu dekodieren.
Ich hab jetzt 2 verschiedene Varianten des BCM-Decodings verwendet,
einmal hab ich direkt nach dem Startpuls begonnen und einmal habe ich
noch einen Takt, also 500µs gewartet und ab da begonnen. (Zu Sehen auch
in KeinManchester(2).png)
Beim Dekodieren bin ich dann auch (wie bereits angedeutet) wieder darauf
gestoßen, dass Manchester-Encoding logisch nicht möglich ist. Stimmt
doch so laut den Bildern, oder? (Markante Stellen sind rot eingekästelt)
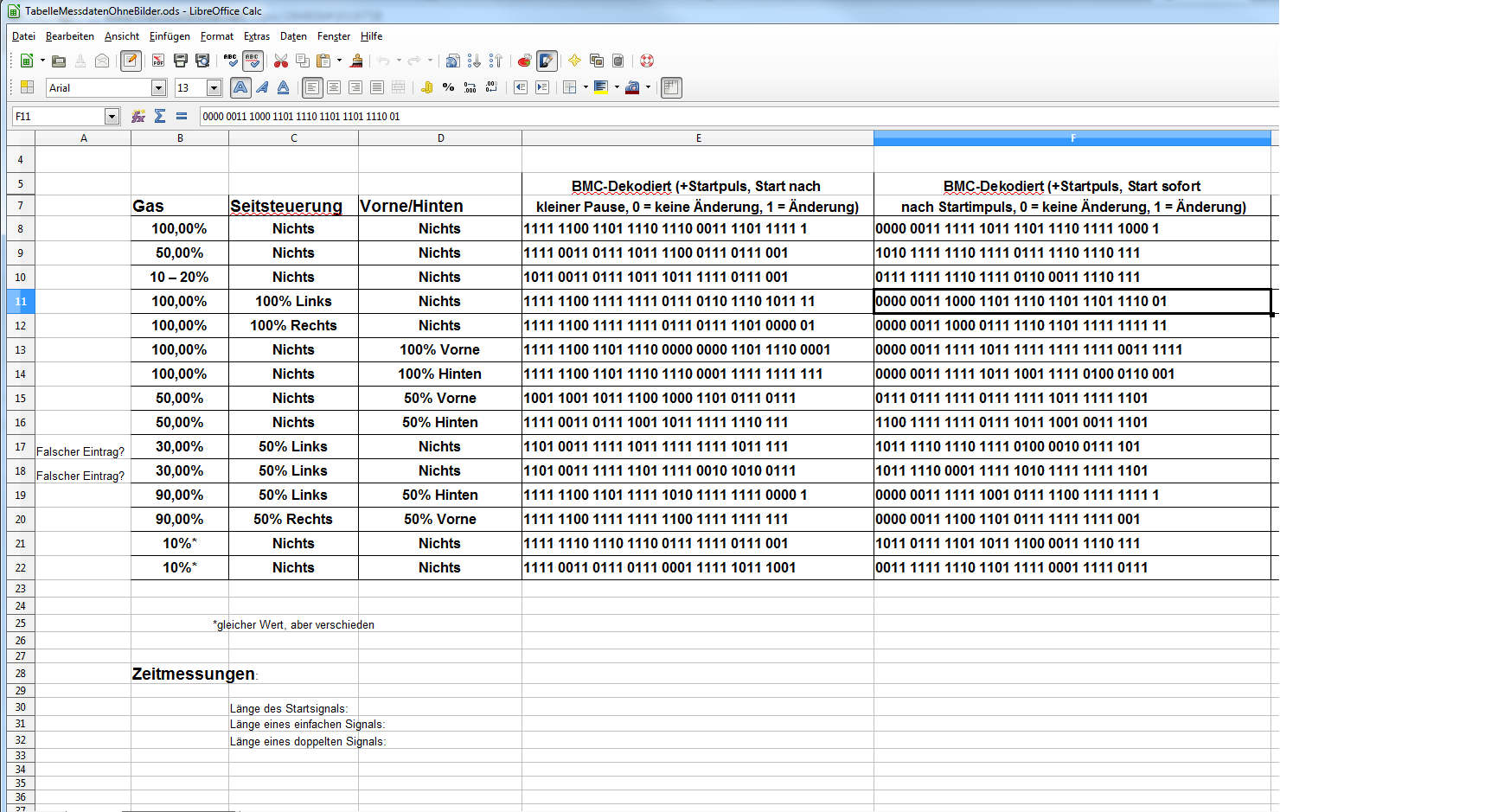
Ich geh zur zeit z.B. schon einmal davon aus, dass die ersten 8 Bit die
Stärke des Gas kodieren.
Welche Werte sollte ich denn erstmal genauer ansehen? Die mit der Grenze
direkt nach dem Startpuls, oder die, wo die Grenze um 500µs verschoben
ist?
Kommen denn noch andere Kodierungsverfahren in Frage?
Ich schätze fast, dass die Längenvariation an einer Checksum liegt, für
eine Lauflängenkodierung finden sich zu viele aufeinanderfolgende 1-
bzw. 0-Worte, oder?
Habt ihr vielleicht noch weitere Vorschläge?
Gruß,
Eff
Hi Eff! Sorry, daß mit der Lauflängenkodierung hat nicht gestimmt. Bei näherer Betrachtung fällt aber auf, daß es immer genau 24 fallende und steigende Flanken gibt. Die unterschiedliche Länge entsteht, da die Abstände variieren. 1 und 0 wird daher vermutlich in diesen Längen kodiert. Weiterhin viel Erfolg flipsi
Angehängte Dateien:
-

Beschleunigung_-_Detail.png
21 KB -

Beschleunigung.png
16 KB
{kind=link}
Ja, das sieht ziemlich danach aus. Ich habe gerade noch einmal eine Reihe von Aufnahmen gemacht, die sich nur in dem Wert des Gashebels unterscheiden, was mir - denke ich - weiterhelfen wird, wenn ich wieder Zeit finde. :) Es sieht wohl so aus, als ist der Rythmus, in der die Steuersignale gesendet werden, weiter nicht von Belang. Wie genau die 1en und 0en nun aussehen, weiß ich zwar noch nicht, aber das wird sich wohl noch zeigen, wenn mal mehr Messungen vorliegen. Mal sehen, was der 4. Teil, der sich auch unterscheidet, sein wird. Vielleicht steckt ja wirklich eine Checksum dahinter, aber das schau ich mir dann später mal irgendwann genauer an. Vielen Dank schonmal für die Tipps und Hilfe, flipsi. :)
Hi Eff! Ich hab nochmal auf Deinen ersten Anhang geschaut und mir ist aufgefallen: Alle Pakete starten mit einem langen Puls (Kopf) und enden mit einem kurzen Puls. Dazwischen liegen 45 Zeitabschnitte, wenn man den Abstand zwischen je zwei Flanken betrachtet. Wenn man diese 45 Abschnitte als 5 Byte + Paritätsbit interpretiert, ergibt sich eine Even-Parität für alle Bytes der ersten drei Messungen (weiter hab ich es nicht ausprobiert). Ich habe lang als 1 und kurz als 0 interpretiert; die Trennung ist "." zwischen Nibbeln, "-" zwischen Byte und Parität und "," zwischen Bytes; +0 steht für den letzten Zeitabschnitt, der immer kurz zu sein scheint: 1111.1101-1,0000.1000-1,0001.0001-0,1110.1000-0,0100.0111-0+0 0010.0101-1,0000.1000-1,0001.0001-0,0011.1000-1,0100.0101-1+0 1010.0001-1,0000.1000-1,0001.0001-0,1011.1000-0,0100.0101-1+0 Das Paritätsbit könnte natürlich auch jeweils das erste Bit sein (falls die Bytes umgekehrt interpretiert werden). Eventuell kannst Du mal mehr von Deinen Daten automatisiert auswerten, ob das so hinkommen kann. Warum allerdings der Gashebelstand in mehreren Bytes kodiert ist, verstehe ich nicht. Hast Du vielleicht doch noch andere Einstellungen geändert als nur das Gas? Oder korrigiert die Fernsteuerung vielleicht auch andere Parameter nach, wenn man das Gas variiert (z.B. die Geschwindigkeit für den Heckrotor), um Übersprechen zu mindern (ich hab noch nie mit einem Modellhubschrauber gespielt und vermute das daher nur)? Viele Grüße flipsi
Ah, da kann ich lange überlegen, warum ich die Abschnitte auch immer in 9 Bytes eingeteilt habe und eine Logik dahinter suchen, wenn ich von Paritätsbits noch nie gehört habe. Eine Art Checksum-Error-Checking hab ich aber schon vermutet. Das mit den Paritätbits stimmt auf jedenfall, das hab ich vorhin bei allen Messwerten nachvollziehen können.
1 | Gas Seitsteuerung Vorne/Hinten 1 = lang, 0 = kurz in Dec (LSB first) |
2 | 100,00% Nichts Nichts 1111.1101-1,0000.1000-1,0001.0001-0,1110.1000-0,0100.0111-0+0 191 16 136 23 226 |
3 | 50,00% Nichts Nichts 0010.0101-1,0000.1000-1,0001.0001-0,0011.1000-1,0100.0101-1+0 164 16 136 28 82 |
4 | 10 – 20% Nichts Nichts 1010.0001-1,0000.1000-1,0001.0001-0,1011.1000-0,0100.0101-1+0 133 16 136 29 82 |
5 | 100,00% 100% Links Nichts 1111.1101-1,0111.0000-1,0001.0001-0,1010.1000-1,0100.1011-0+0 191 14 136 21 210 |
6 | 100,00% 100% Rechts Nichts 1111.1101-1,0111.1000-0,0001.0001-0,1010.0000-0,0100.1111-1+0 191 30 136 5 242 |
7 | 100,00% Nichts 100% Vorne 1111.1101-1,0000.1000-1,0001.1111-1,1110.0001-0,1100.0111-1+0 191 16 248 135 227 |
8 | 100,00% Nichts 100% Hinten 1111.1101-1,0000.1000-1,0001.0110-1,1110.1001-1,1000.0111-0+0 191 16 104 151 225 |
9 | 50,00% Nichts 50% Vorne 1011.0101-1,0000.1000-1,0001.1001-1,1010.1001-0,0000.0101-0+0 173 16 152 149 160 |
10 | 50,00% Nichts 50% Hinten 0000.1101-1,0000.1000-1,0001.1010-1,0001.1001-1,0000.0101-0+0 176 16 88 152 160 |
11 | 90,00% 50% Links 50% Hinten 1111.1101-1,0000.1000-1,1001.0100-1,0001.1000-0,0000.0111-1+0 191 16 41 24 224 |
12 | 90,00% 50% Rechts 50% Vorne 1111.1101-1,0001.1000-0,1001.0001-1,0000.0000-0,0000.0011.0+0 191 24 137 0 192 |
13 | 10%* Nichts Nichts 0010.0001-0,0000.1000-1,0101.0001-1,0111.1000-0,0100.0101-1+0 132 16 138 30 162 |
14 | 10%* Nichts Nichts 1100.0001-1,0000.1000-1,0101.0001-1,1011.1000-0,0100.0101-1+0 131 16 138 29 162 |
15 | |
16 | |
17 | Turbotaste änderte 4. Byte, Trimmrad Byte 3, 4 und 5. |
Nach einigen Experimenten mit der Turbotaste und dem Trimmrad, bin ich zwar wieder etwas verwirrter, aber da brauch ich einfach nur mehr Messwerte, bei denen ich auch rel. genau auf die genau Ansteuerung achte. Das muss ich aber erst mal nach hinten verschieben, die Prüfungen stehen an. Aber danke für den entscheidenden Tipp! Wenn man dann mal weiß, wie der Binary-Blob aufgeteilt ist und man 1en und 0en richtig unterscheiden kann, sollte das weitere Auseinandernehmen des Protokolls mit genügend, zuverlässigen Messwerten nur noch eine Frage der Zeit sein. Hast mir super weitergeholfen, flipsi! :) (Zu deiner Frage: Der Helikopter besitzt einen Koaxialrotor, der für den Auftrieb und das Drehen zuständig ist. Der Heckrotor ist parallel zu dem großen Rotor angebracht und sorgt nur für Vor- und Rücktrieb beim Fliegen. (Der Turboknopf ist auch nur ein Turbo für den Heckrotor, hat also auch nur Auswirkung, wenn man nach vorne/hinten fliegt) Es kann also auch gut sein, dass beim Beschleunigen/Gas Geben die beiden Hauptrotoren getrennt angesprochen werden. Damit rechnet die Fernbedienung dann auch die "Drehzahl" der beiden Hauptrotoren aus, um die gewünschte Drehung zu bewerkstelligen oder eben zu verhindern. Ich werde den Thread vielleicht für interessierte Googler vielleicht nochmal ausgraben und updaten, wenn mir die genaue Bedeutung jedes einzelnen Bits dann klar sein wird, das kann aufgrund bevorstehender Prüfungen allerdings noch ein wenig dauern.) Gruß, Eff
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.