Hallo,
ich brauche dringend Hilfe.
Ich habe mir das MSP430 besorgt und dazu einen Motortreiber. Dabei
handelt es sich um den L298.
http://dx.com/p/l298n-stepper-motor-driver-controller-board-for-arduino-120542?item=4
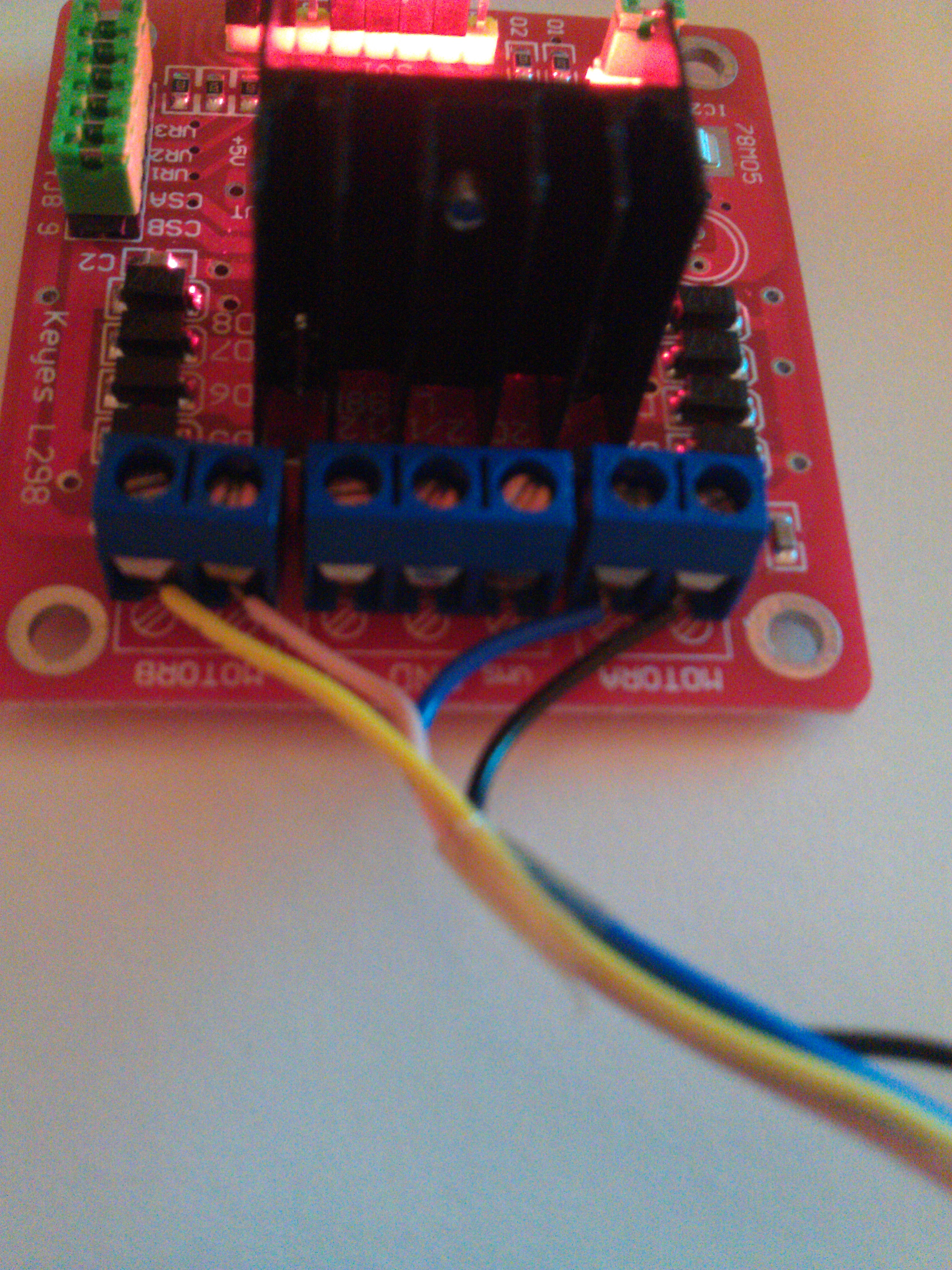
Das ist der Motortreiber den ich gekauft habe.
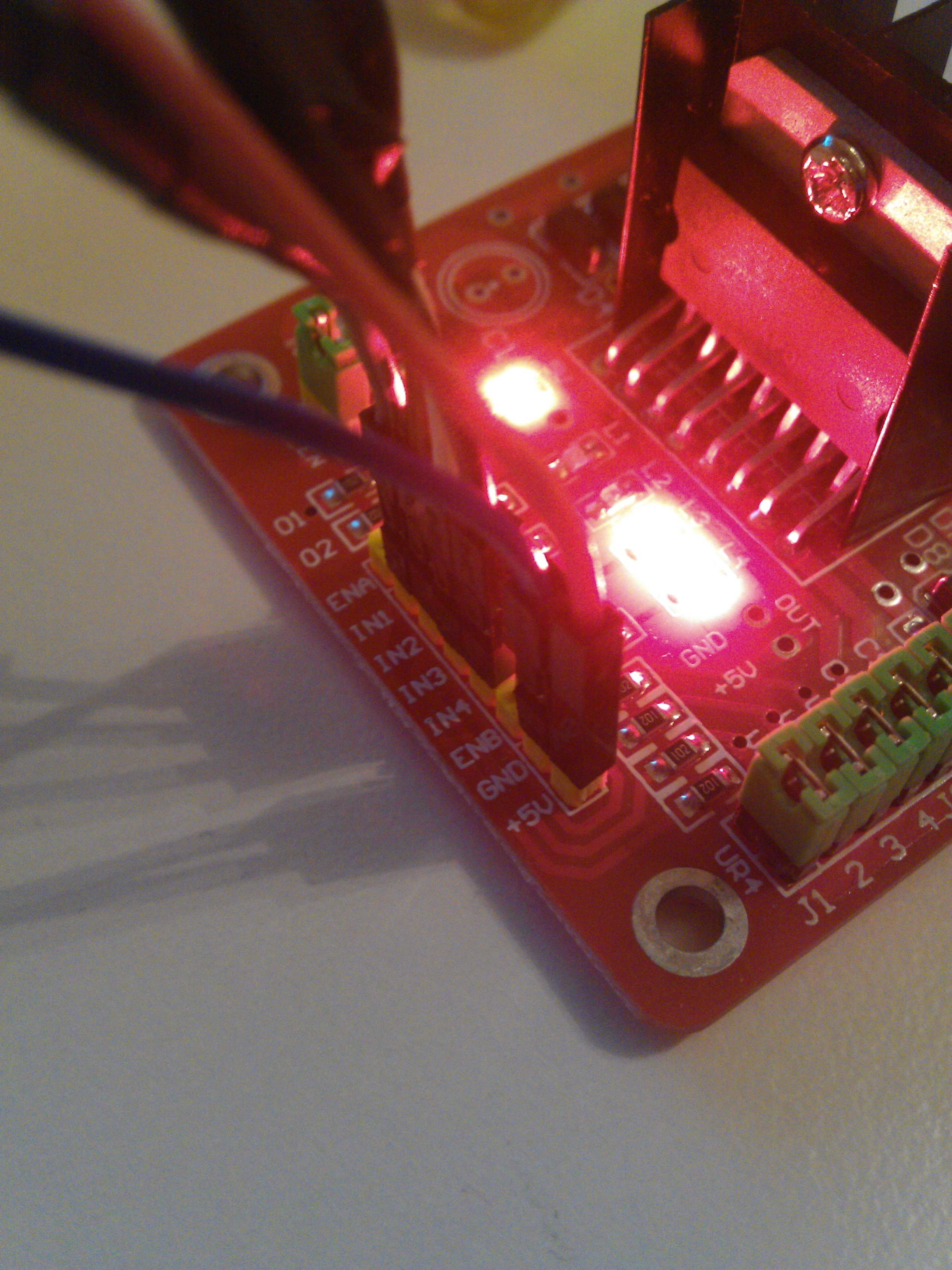
Die Ausgänge des MSP430 2.0 - 2.3 gehen auf IN 1-4 auf dem Treiber.
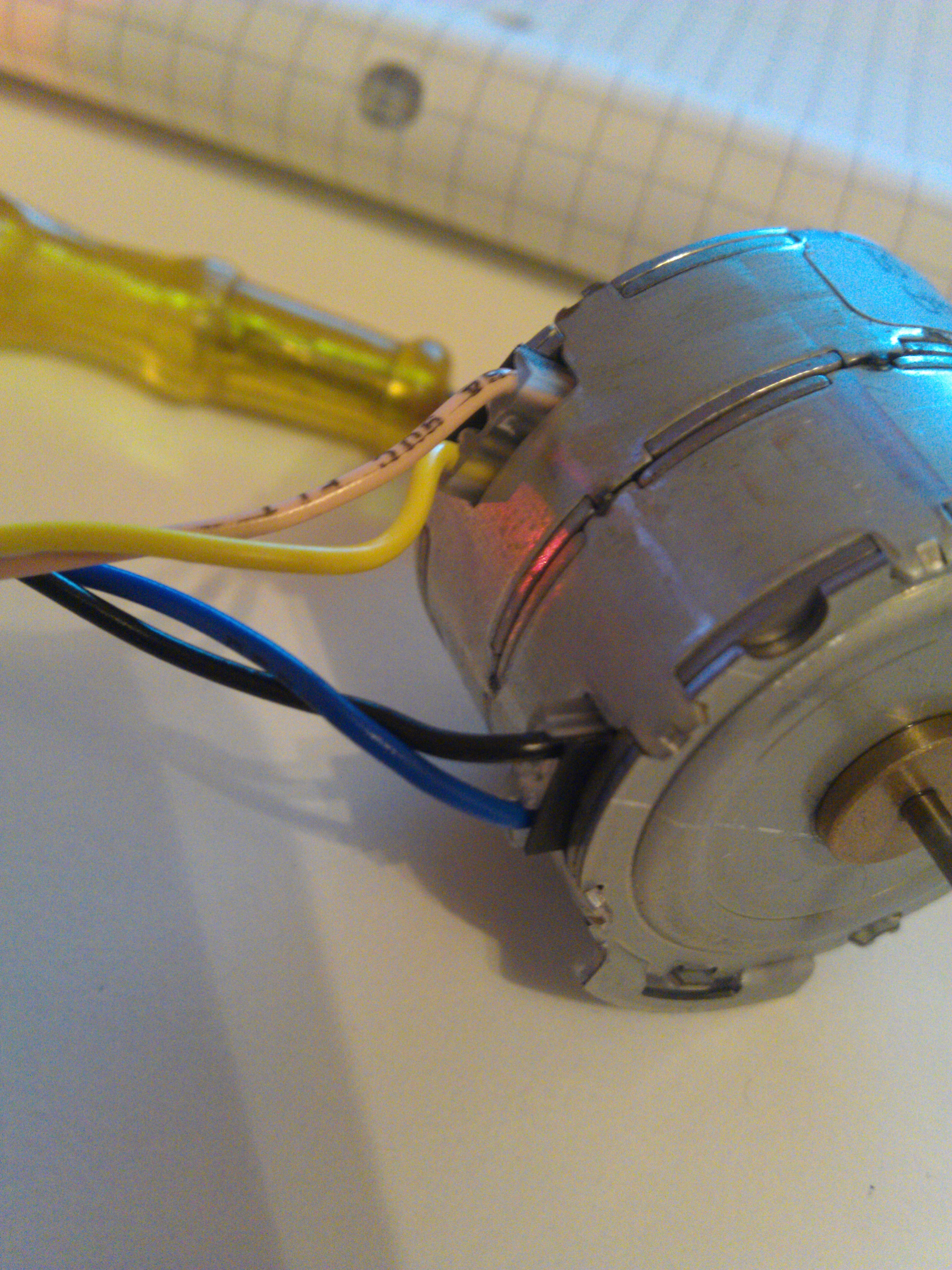
Der Ausgang 1.4 geht auf +5V des Treibers. Den Motor habe ich wie auf
dem Bild angeschloßen, ist ein 5 Volt Bipolarer Schrittmotor mit 2
Phasen.
Das ist der Code zum Ansteuern des Motors. Ich habe mich etwas
eingelesen, bin aber aus den Tabellen nicht schlau geworden. Ich habe
folgendes umgesetzt:
1a 1b 2a 2b
1 0 0 1
1 0 1 0
0 1 1 0
0 1 0 1
1 | int main(void) {
|
2 | WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
|
3 | P2DIR |= 0x0F; // Set P1.0 to output direction
|
4 | P1DIR |= 0x10;
|
5 | P1OUT = 0x10;
|
6 | int a=0;
|
7 | for(;;) //infinite loop
|
8 | {
|
9 | volatile unsigned int i; // volatile to prevent optimization
|
10 | int step[5]={0x09, 0x05, 0x06, 0x0A};
|
11 |
|
12 |
|
13 | P2OUT ^= step[a]; // Toggle P1.0 using exclusive-OR
|
14 | a++;
|
15 | if(a==3)
|
16 | {
|
17 | a=0;
|
18 | }
|
19 | i = 15000; // SW Delay
|
20 | do i--;
|
21 | while(i != 0);
|
22 | }
|
23 |
|
24 | return 0;
|
25 | }
|
Meine 1. Frage: Ist die Tabelle so Korrekt? Oder ist am Code was falsch
oder hab ich mir was falsches überlegt?
Die 2. Frage: Kann es sein das die Ausgangsspannung vom MSP430 für die
Versorgung des Motortreibers nicht reicht, und ich eine externe
Versorung brauche????
Über Hilfe würde ich mich freuen.
P.s ich bin Einsteiger in diesem Gebiet. Das wird mein erstes Projekt
Danke schonmal im Voraus
Mit freundlichen Grüßen
vNecked