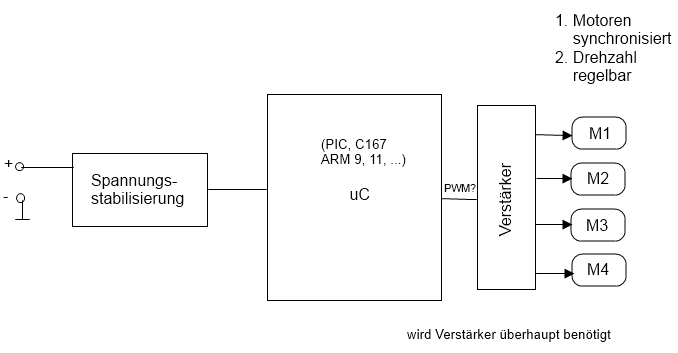
Hallo, ich hätte eine Frage zur Ansteuerung von 4 Motoren, welche synchron laufen sollen. Im Bild im Anhang hab ich das Schaltbild- Diagramm aufgezeichnet. Was sagt ihr dazu, kann das so klappen oder hab ich da was vergessen. Ich wäre auch über details dankbar z.B. wie die Ansteuerung der Motoren funktionieren kann - z.B. über PWM oder .... und ob ich die Verstärkerschaltung überhaupt benötige. Die Ansteuerschaltung im uC stell ich mir jetzt nicht so schwierig vor - das ist ja "nur" das Signal (PWM) 4 mal auf die richtigen Ausgangspins legen - was sagt ihr dazu? Bin dankbar für jede Info in diese Richtung. lg Walter
Angehängte Dateien:
-

Image.png
9,2 KB
Walter Meier schrieb: > ich hätte eine Frage zur Ansteuerung von 4 Motoren, welche synchron > laufen sollen. Vielleicht sagst Du besser, was Du bewegen möchtest. Das Wort 'synchron' in Zusammenhang mit PWM ist für mich sehr schwammig, da es sich um DC-Motore handeln muß, die sich eigentlich drehen, wie sie wollen - nur nicht snchron. Synchron ohne viel Aufwand können sich nur Schrittmotore bewegen. Aber die hast Du wohl nicht vorgesehen. Daher: was genau soll es werden?
Also es wird ein Fahrzeug werden, deshalb sollten sich die Motoren mit gleicher Geschwindigkeit bewegen. Es können auch AC- Motoren sein - aber eben mit Drehzahlregelung. was würdet ihr für Motoren verwenden? lg Walter
> 4 Motoren, welche synchron laufen sollen. Dann brauchst du schon mal eine Drehzahlregelung und dazu unbedingt 4 Drehzahlsensoren (oder du verwendest Schrittmotore). > wird Verstärker überhaupt benötigt ? Wenn deine Motoren mehr als 5V/20mA benötigen wohl schon, aber du hast NATÜRLICH keinerlei Angaben gemacht.
MaWin schrieb: >> 4 Motoren, welche synchron laufen sollen. > > Dann brauchst du schon mal eine Drehzahlregelung und dazu unbedingt 4 > Drehzahlsensoren (oder du verwendest Schrittmotore). > >> wird Verstärker überhaupt benötigt ? > > Wenn deine Motoren mehr als 5V/20mA benötigen wohl schon, aber du hast > NATÜRLICH keinerlei Angaben gemacht. Das weiß ich selber noch nicht, wie ich das alles machen soll, ich weiß nur den Anwendungsfall und das ist der, dass dieses Gefährt auch fast senkrecht hochfahren können soll und ein paar kg ziehen soll (ca. 10kg). Alles andere muss ich jetzt erst evaluieren und da bin ich gerade dabei. Mir wäre sehr geholfen, wenn ich mal die richtigen Motor's ausgewählt hätte - die sind nämlich der knackpunkt und müssen einiges an Drehmoment liefern. Was sagt ihr dazu? lg Walter
MaWin schrieb: >> 4 Motoren, welche synchron laufen sollen. > > Dann brauchst du schon mal eine Drehzahlregelung und dazu unbedingt 4 > Drehzahlsensoren (oder du verwendest Schrittmotore). > >> wird Verstärker überhaupt benötigt ? > > Wenn deine Motoren mehr als 5V/20mA benötigen wohl schon, aber du hast > NATÜRLICH keinerlei Angaben gemacht. Das weiß ich selber noch nicht, wie ich das alles machen soll, ich weiß nur den Anwendungsfall und das ist der, dass dieses Gefährt auch fast senkrecht hochfahren können soll und ein paar kg ziehen soll (ca. 10kg). Alles andere muss ich jetzt erst evaluieren und da bin ich gerade dabei. Mir wäre sehr geholfen, wenn ich mal die richtigen Motor's ausgewählt hätte - die sind nämlich der knackpunkt und müssen einiges an Drehmoment liefern. Was sagt ihr dazu? lg Walter
Walter Meier schrieb: > und müssen einiges an Drehmoment > liefern. Dann nimm halt welche die dein gefordertes Drehmoment liefern.
Walter Meier schrieb: > Also es wird ein Fahrzeug werden, deshalb sollten sich die Motoren mit > gleicher Geschwindigkeit bewegen. Das tun sie von sich aus garantiert nicht, schon weil sie unterschiedlich belastet werden. Je nachdem wie genau du synchron verstehst, brauchst du an jedem Rad einen Geschwindigkeits- oder einen Wegsensor, und selbstverständlich eine unabhängige Regelung für jedes Rad. Ob das dann auch bewirkt was du wolltest, ist eine ganz andere Frage, weil sich Räder an einem Fahrzeug ja keineswegs immer gleich schnell drehen müssen. Ohne Differential keine Kurven. Gruss Reinhard
> dass dieses Gefährt auch fast senkrecht hochfahren können soll > und ein paar kg ziehen soll (ca. 10kg). Die Haftreibung bei senktrecht ist 0. Das kannst du also vergessen. Ausserdem braucht man für Hochfahren keine 4 Motore und keine 4 gleichlaufenden Motore, sondern eher eine Zahnradbahn.
Vielleicht geht es auch um so etwas wie eine Maschine zur Fensterfrontreinigung, funktioniert natürlich auch nicht wenn die Fenster wirklich senkrecht sind, aber ansonsten wird das ja auch eingesetzt. Das Thema "ich möchte ein Fahrzeug mit vier Motoren an jedem Rad fahren lassen" hatten wir aber vor kurzem schon einmal, da ging es um einen Roboter und einen ratschlagresistenten TO. Gruß Andi
Egal wie das Fahrzeug konstriert ist, Du kannst nicht einfach 4 Motoren parallel schalten, auch nicht mit "Verstärker". Das heisst übrigens Treiber. Jeder Motor braucht seine eigene Drehzahlregelung, folglich auch einen Drehzahl-Sensor. Motor, Sensor und Steuerung müssen zusammen passen. Hersteller von Antriebstechnik (zum Beispiel die Firma ABB) liefern solche Bundles.
> >dass dieses Gefährt auch fast senkrecht hochfahren können soll > >und ein paar kg ziehen soll (ca. 10kg). > Die Haftreibung bei senktrecht ist 0. Haha made my day :D ... Warum überhaupt 4x4 ? Nimm doch eine Achse mit 2 Rädern und mach draus einen Hinterradantrieb. Dann noch 2 weitere an der Front welche nur steuern. Aber Senkrecht mit 10kg? In diesem fall würde ich doch die Motoren 4x4 ansteuern lassen und Propeller drauf stecken ;-) (Quadrocopter Transformer)
Walter Meier schrieb: > ich weiß > nur den Anwendungsfall und das ist der, dass dieses Gefährt auch fast > senkrecht hochfahren können soll und ein paar kg ziehen soll (ca. 10kg). Das kriegst du mit (fast) jedem hin. Du mußt nur ein ausreichendes Getriebe einbauen. Wenn dein Gefährt incl. zu ziehender Last einen bestimmten Höhenunterschied überwinden soll, mußt du seine Potentielle Energie um den entsprechenden Wert erhöhen. Ein Motor kann eine bestimmte Leistung abgeben, d.h. aus Energiedifferenz und Leistung kannst du die Zeit ausrechnen, die der Motor unter Idealbedingungen (keine Reibungsverluste) braucht, um diese Energie über seine Welle abzugeben. Je nach Verlusten kommt dann noch ein Aufschlag auf Grund des Wirkungsgrades dazu.
MaWin schrieb: > Die Haftreibung bei senktrecht ist 0. Jein. Hab mal nen Bericht von nem Formel 1 Wagen gelesen, dass die aerodynamisch so viel Abtrieb (bei ner Geschwindigkeit ab 200km/h) produzieren, dass Sie auch kopfüber fahren könnten ... Beste Grüße, Michael
Kurzzeitig schaft es auch ein Rad Senkrecht hochzufahren, darf nur nicht zu lange senkrecht hoch gehen. Mit 4 mal 5V/20mA verfügst du über 0,2W Leistung. Um 10kg auf 10km/h zu beschleunigen benötigst du kinetische Energie: 10km/h = 2,78 m/s E = 0,5*m*v² E = 0,5*10kg*(2,78m/s)² E = 38,58kg*m²/s² = 38,58Ws Wie lange musst du Beschleunigen? t = E/P = 192,9s = 3min und 12,9s Für dein Senkrechtes hoch fahren, stellen wir uns einen Kran vor. Sonst greift das Haftreibungsproblem, ergibt sich eine Maximale Geschwindigkeit von: E = m*g*h P = m*g*v_max v_max = P/(m*g) v_max = 0,0020387 m/s v_max = 7,34 METER/h Schlussfolgerung: Ja es geht aber dynamisches Fahren sieht anders aus. Und das ist nur die theoretische Überlegung, wenn du einen Motor hast der über den kompletten Drehzahlbereich die gleiche Leistung abgeben kann bei gleichbleibender Spannungs und Strom versorgung. Ach der Wirkungsgrad muss auch 1 sein. Das gibt es nicht.
Michael K. schrieb: > Jein. Hab mal nen Bericht von nem Formel 1 Wagen gelesen, dass die > aerodynamisch so viel Abtrieb (bei ner Geschwindigkeit ab 200km/h) > produzieren, dass Sie auch kopfüber fahren könnten ... Siehe meine Berechnung oben, 77.160 Sekunden also gute 21h 30min Beschleunigen und schon geht es Kopfüber... Hat wer lust auszurechnen wie wie Strecke das ist?
Das klingt nach einem Allrad. Was man will, ist eine ungefähr (gleichmäßige) Verteilung der Leistung. Das macht man oftmals mittels eines PWM-Signals dessen Frequenz nichts mit dem Motor zu tun hat, Stichwort: Servo. Man kann es aber auch mit der PWM-Frequenz des Motors direkt machen. Ersteres wäre zu bevorzugen. Damit kannst Du dann die Stromstärke (proportional zum Drehmoment) skalieren. Eine Perfekte Synchronisierung will man nicht! Die Räder haben zu Beginn einer Fahrt und am Ende unterschiedliche Strecken gefahren durch Unbenheiten und Kurven. Man verteilt also nur die Leistung einigermaßen gleichmäßig, erlaubt aber Abweichungen um das "durchdrehen" oder "blockieren" zu verhindern. Die Synchronisierung erfolgt über die Straße. Erst wenn ein Rad den Boden verläßt steigt der entsprechende Motor auf "Leerlaufdrezahl". Da kann man an einen Begrenzer denken, z.B. eine Begrenzung der Drehzahlzunahmegeschwindigkeit und Maximaldrehzahl. Dann können die Motoren auch unabhängig laufen. Somit haben wir überall die gleiche Kraft(Drehmoment) asynchron was uns das Differntialgetriebe spart. So haben wir die Leistung verteilt. Stromstärke (Drehmoment vorgeben) mal Drehzahl (synchronisiert über Straße) ergibt die Leistungsverteilung.
Ups, hatte das am Nachmittag geschrieben, war dann mal kurz weg und hab es gerade erst abgeschickt. Ein par Sachen waren also schon gesagt, z.B. daß es ein Allrad ist.
Walter Meier schrieb: > Also es wird ein Fahrzeug werden, deshalb sollten sich die Motoren mit > gleicher Geschwindigkeit bewegen. > Es können auch AC- Motoren sein - aber eben mit Drehzahlregelung. > was würdet ihr für Motoren verwenden? Das Einfachste (allerdings abhängig von der Leistung) wären DC-Motore, die garnicht synchron laufen müssen. Sobald das Fahrzeug eine Lenkung hat, ist dann eher gleichmäßiges Drehmoment der Räder als gleiche Drehzahl wichtig. Es könnte aber auch schon eine einfache PWM-Drehzahlregelung ausreichen, sofern die übergeordnete Steuerung (homo sapiens?) die Fahrt kontrolliert. Eine leicht ungleichmäßige Leistung der Antriebsräder wird diese nicht gleich aufquietschen lassen :-) Walter Meier schrieb: > Mir wäre sehr geholfen, wenn ich mal die richtigen Motor's ausgewählt > hätte - die sind nämlich der knackpunkt und müssen einiges an Drehmoment > liefern. > > Was sagt ihr dazu? "Wir brauchen mehr Details!"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.