Ich habe bei Wikipedia den Artikel über Quadrokopter gelesen und bin dabei auf Stabilisierung durch unterschiedliche Strahlausrichtung gestoßen: http://de.wikipedia.org/wiki/Quadrokopter#Stabilisierung_durch_unterschiedliche_Strahlausrichtung Kann mit jemand genauer erklären, wie das funktioniert? Braucht es dann immer noch Gyros? Weil in Artikel ist die Elektrische Stabilisierung durch Gyroskope extra aufgeführt...
Naja die Gyros braucht man zum Messen. Ohne Messen wird's schwierig...
Ich würde mal sagen, das eine hat mit den anderen genau gar nichts zu tun. Die 'unterschiedliche Strahlausrichtung' ist das Gegenstück zur Technik jeweils die Hälfte der Motoren in gegenläufige Richtungen drehen zu lassen. In letzterem Fall wird das Drehmoment, das jeder Motor auf den Quadro ausübt durch die Gegenläufigkeit ausgeglichen. In ersterem Fall würde der Quadro sich beim Schweben in der Luft um seine Hochachse drehen (weil sich die Drehmomente der Motoren nicht ausgleichen), was dadurch kompensiert wird, dass man die Motoren etwas geneigt einbaut, so dass der Strahlschub das entsprechende Gegenmoment aufbaut.
qwertz schrieb: > Braucht es dann immer noch Gyros? Ich denke mit einem Ćevapi wäri es auch getan! qwertz schrieb: > Kann mit jemand genauer erklären, wie das funktioniert? Ja was willst du jetzt haben? Die Regeltechnik die dahinter steckt ist nicht gerade in 2-3 Beiträgen verfasst.
Electronics'nStuff schrieb: > qwertz schrieb: >> Kann mit jemand genauer erklären, wie das funktioniert? > > Ja was willst du jetzt haben? Die Regeltechnik die dahinter steckt ist > nicht gerade in 2-3 Beiträgen verfasst. Ich wollte das mit der Strahlausrichtung wissen. Über die Regelung mit Gyro + Acc habe schon einiges gelesn...
Angehängte Dateien:
-

Quadro.png
9,6 KB
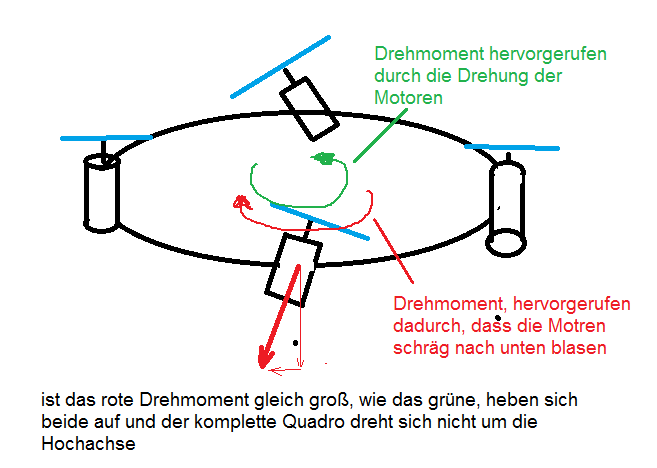
qwertz schrieb: > Ich wollte das mit der Strahlausrichtung wissen. Und? Bist du jetzt schlauer? Was damit gemeint ist, ist um Grunde eine Variation von Motorsturz bzw. Motorzug. Entgegen landläufiger Meinung werden auch in einmotorigen Flugzeugen (auch Modellflugzeugen) die Motoren nicht exakt in der Längsachse des Flugzeugs eingebaut, sondern um einen gewissen Winkel dagegen geneigt, bzw. seitlich gedreht. Der Sinn dahinter ist ganz einfach der, dass der Motor ja im FLugzeug durch seine Drehbewegung ein Moment erzeugt, welches das Flugzeug ständig versuchen würde gegen die Motordrehrichtung zu drehen. Und das kompensiert man, indem man den Motor zb etwas nach rechts 'ziehen' lässt, so dass sich in Summe wieder ein neutrales Flugverhalten ergibt. Und hier ist die Sache auch nicht anders. Versuchen die gleichlaufenden Motoren den Quadro gegen den Uhrzeiger zu drehen, so werden die Motoren etwas schräg gestellt, so dass ihr Abluftschub ein Drehmoment im Uhrzeiger erzeugen. Sind die beiden gleich groß, dann bleibt um die Hochachse kein Moment übrig und der Quadro als ganzes dreht sich nicht von alleine um die Hochachse.
Siebzehn und Fuenfzehn schrieb: > Naja die Gyros braucht man zum Messen. Du meinst zum Essen ;-) Ich nehm lieber nen Döner. Karl Heinz Buchegger schrieb: > Der Sinn dahinter ist ganz einfach der, dass der Motor ja im FLugzeug > durch seine Drehbewegung ein Moment erzeugt, welches das Flugzeug ständig > versuchen würde gegen die Motordrehrichtung zu drehen. Und das > kompensiert man, indem man den Motor zb etwas nach rechts 'ziehen' lässt, > so dass sich in Summe wiederein neutrales Flugverhalten ergibt. Das kann man durch eine Neigung des Motors zur Seite aber nicht kompensieren. Beim Quadrokopter klappt das nur deshalb, weil die Motoren nicht mittig sind und daher durch die Neigung ein Drehmoment entsteht. Der Effekt würde sich beim Flugzeug höchstens dann ergeben, wenn man zwei Triebwerke in den Tragflächen hat und eins nach oben und das andere nach unten neigt. Den Motor-Seitenzug gibt es aus einem anderen Grund: Der Antrieb erzeugt quasi einen spiralförmig um den Rumpf laufenden Wind. Nun hat das Flugzeug aber eine Unsymmetrie: Es gibt zwar ein Seitenruder, das nach oben steht, aber keines nach unten. Wenn da nun der Wind des Motors dagegen bläst, wird deshalb der Rumpf hinten leicht zur Seite gedrückt. Um das auszugleichen, neigt man den Motor seitlich, so daß auch vorne leicht in die selbe Richtung gezogen wird. Das Flugzeug fliegt damit eigentlich ganz leicht schräg.
Kennt jemand eine Website, auf der das Komplementärfilter gut beschrieben ist? Ich habe bis jetzt nur die Grundlagen dazu gefunden, aber keine Beschreibung, die tiefer auf das Thema eingeht.
Karl Heinz Buchegger schrieb: > Versuchen die gleichlaufenden > Motoren den Quadro gegen den Uhrzeiger zu drehen, so werden die Motoren > etwas schräg gestellt Und was ist der Vorteil gegenüber von vornherein gegensinnig drehenden Motoren?
Timm Thaler schrieb: > Und was ist der Vorteil gegenüber von vornherein gegensinnig drehenden > Motoren? Daß man vier gleiche Propeller einsetzen kann und die nicht einmal als rechts- und einmal als linksdrehende Variante braucht. Nicht jeden Propeller gibt es in beiden Varianten.
Rolf Magnus schrieb: > Timm Thaler schrieb: >> Und was ist der Vorteil gegenüber von vornherein gegensinnig drehenden >> Motoren? > > Daß man vier gleiche Propeller einsetzen kann und die nicht einmal als > rechts- und einmal als linksdrehende Variante braucht. Nicht jeden > Propeller gibt es in beiden Varianten. Einen Propeller mit unterschiedlichen Drehrichtungen herzustellen, dürfte das kleiner Problem sein. Eher haben Motoren eine primäre Drehrichtung. Aber warum ist der Absatz im Wikipedia-Artikel wohl so kurz geraten? Weil sich das System nicht lohnt, bzw. ein System mit Rotoren unterschiedlicher Drehrichtung inzwischen einfacher zu realisieren ist. Den richtige Kippwinkel einzustellen wird schwieriger sein, als zwei Propeller mit unterschiedlichen Drehrichtungen herzustellen. Wenn ich mir so ansehe, wie damals der Sturz und der Winkel des Verbrennungsmotors bei einem Modellstarrflügler einzustellen war, um das Drehmoment zu kompensieren, ist eine elektronische Lagesteuerung Pippifax dagegen.
Paule H. schrieb: > Rolf Magnus schrieb: >> Timm Thaler schrieb: >>> Und was ist der Vorteil gegenüber von vornherein gegensinnig drehenden >>> Motoren? >> >> Daß man vier gleiche Propeller einsetzen kann und die nicht einmal als >> rechts- und einmal als linksdrehende Variante braucht. Nicht jeden >> Propeller gibt es in beiden Varianten. > > Einen Propeller mit unterschiedlichen Drehrichtungen herzustellen, > dürfte das kleiner Problem sein. Wenn man Propellerhersteller ist. Als Hobbybastler ist es aber nicht so einfach, einen zu bauen. Da muß man halt nehmen, was der Markt hergibt, und da ist die Auswahl an Propellern, die es für beide Drehrichtungen gibt, überschaubar. Möglich ist es natürlich, und das hat sich in letzter Zeit bestimmt auch gerade durch das große Aufkommen der Quadrokopter stark verbessert. Davor gab es halt keinen Anreiz für Propeller-Herseller, ihre Propeller für beide Laufrichtungen zu bauen. Wozu auch? > Eher haben Motoren eine primäre Drehrichtung. Bürstenlose haben sowas nicht. > Aber warum ist der Absatz im Wikipedia-Artikel wohl so kurz geraten? > Weil sich das System nicht lohnt, bzw. ein System mit Rotoren > unterschiedlicher Drehrichtung inzwischen einfacher zu realisieren ist. Gerade bei den billigsten Fliegern nutzt man es aber nicht. Hier z.B.: http://www.amazon.de/Silverlit-85653-TandemZ-ferngesteuerter-Hubschrauber/dp/B001381O8U Billigst-"Heli", und bei dem ist es so gelöst, daß die Rotoren in die gleiche Richtung drehen und geneigt sind. Auf dem vorletzten Bild, kann man es einigermaßen erkennen. In real sieht das Ding aus, als wäre es zu lange in der Sonne gelegen. ;-) > Wenn ich mir so ansehe, wie damals der Sturz und der Winkel des > Verbrennungsmotors bei einem Modellstarrflügler einzustellen war, um das > Drehmoment zu kompensieren, ist eine elektronische Lagesteuerung > Pippifax dagegen. Nochmal: Die Einstellung der Motor-Zugrichtung hat nichts mit dem Propeller-Drehmoment zu tun. Und so ein Hexenwerk ist das nun auch nicht. Und ich finde es auch vorteilhaft, wenn es ein Flugzeug auch ohne massiven Einsatz von Regelungstechnik noch schafft, einigermaßen geradeaus zu fliegen.
Rolf Magnus schrieb: > Wenn man Propellerhersteller ist. Als Hobbybastler ist es aber nicht so > einfach, einen zu bauen. Da muß man halt nehmen, was der Markt hergibt, > und da ist die Auswahl an Propellern, die es für beide Drehrichtungen > gibt, überschaubar. Yep. Das war auch immer das Problem bei Modellen mit Druckschraube. Sieht bei einem Delta natürlich schick aus, wenn der Motor hinten ist. Aber entweder man kriegte keinen (Bürsten-) Motor der links rum dreht oder keine Druckschraube. > Nochmal: Die Einstellung der Motor-Zugrichtung hat nichts mit dem > Propeller-Drehmoment zu tun. Nichts desto trotz war es Fummelarbeit. Vollgas anfliegen, senkrecht hochziehen, in welche Richtung dreht er weg. Das ganze noch ein paar mal, um eventuelle Windeinflüsse rauszumitteln. Landen. Keile unterlegen und auf zum nächsten Versuch. Wenn der Zug (und Sturz) dann endlich akzeptabel waren, war man Profi im Landen :-)
Zwei Motoren müssen rechts, die anderen Links herum laufen. Dabei muss linke Seite und rechte Seite sowie vorne und hinten als gegenläufig ausgelegt sein. Die Elektronik benötigt 3x Gyro sowie 3x Beschleunigungsmesser. Die Beschleunigungssensoren (ACC) sind für die Absolutposition relativ zur Erde wichtig. Die Gyro sind für die Abweichungen durch Bewegung/Kippen/Rollen/Nicken. Im Mikrokopterforum siehst ein Schaltbild. Die Software kannst in C oder Bascom schreiben. Funktioniert beides.
Arkan schrieb: > Zwei Motoren müssen rechts, die anderen Links herum laufen. > Dabei muss linke Seite und rechte Seite sowie vorne und hinten als > gegenläufig ausgelegt sein. Das ist das Prinzip, wie es "billig" ist und heute standardmäßig verwendet wird. Das war aber nicht die Frage. :D Rolf Magnus schrieb: > Billigst-"Heli", und bei dem ist es so gelöst, daß die Rotoren in die > gleiche Richtung drehen und geneigt sind. Auf dem vorletzten Bild, kann > man es einigermaßen erkennen. In real sieht das Ding aus, als wäre es zu > lange in der Sonne gelegen. ;-) Interessant zu wissen (eine Banane fehlt mir noch in der Sammlung). Eigentlich soll doch der Rotor in der zweiten Ebene für den Drehmomentausgleich sorgen. Zumindest ist das bei den IR-Koax-Helis der Fall.
Welche werte sollte ich bei Gyro und Acc als Skalenendwert einstellen Gyro: +/- 250 dps +/- 500 dps +/- 2000 dps Acc +/- 2 g +/- 4 g +/- 8 g +/- 16g
> Welche werte sollte ich bei Gyro und Acc als Skalenendwert einstellen
ich habe immer den kleinsten Wert genommen (also 250dps und +-2g).
Ferner habe ich die Output Data Rate auf 800Hz eingestellt (maximum)
Alles bei der Verwendung eines L3G4200D.
als Regelschleifenfrequenz habe ich 500Hz genommen.
quad schrieb: > Alles bei der Verwendung eines L3G4200D Diesen Gyro will ich auch verwenden. Ich versuche mein Glück mit Komplementärfilter + PID-Regler am Anfang mit einem Motor, der an einem Hebel befestigt ist, wenn das Klappt, gehe ich auf 4 Motoren über...
Was ist eigentlich "Cut-Off" im CTRL1 Register. Welchen Wert sollte ich dort einstellen?
Reicht es für die Regelung aus, wenn ich davon ausgehe dass im Bereich zwischen 0 und 30° sin(x)=x ist?
Rolf Magnus schrieb: > Und ich finde es auch vorteilhaft, wenn es ein Flugzeug auch ohne > massiven Einsatz von Regelungstechnik noch schafft, einigermaßen > geradeaus zu fliegen. Entspricht aber nicht dem Zeitgeist. Auch im Automobilbau ist es Usus geworden, konstruktive Mängel am Fahrwerk elektronisch zu kompensieren. ;-) Karl Heinz Buchegger schrieb: > Yep. Das war auch immer das Problem bei Modellen mit Druckschraube. > Sieht bei einem Delta natürlich schick aus, wenn der Motor hinten ist. > Aber entweder man kriegte keinen (Bürsten-) Motor der links rum dreht > oder keine Druckschraube. Also ich habe bei meinen Deltas/Brettern bisher immer ganz normale Latten verwendet, mit Brushless natürlich. Geht sogar mit Klappluftschrauben.
Arkan schrieb:
>Die Elektronik benötigt 3x Gyro sowie 3x Beschleunigungsmesser.
Stimmt so nicht! Ich fliege nur mit 3AchsGyro und mehr ist nicht nötig
um zu fliegen. Acc misst nicht nur die Erdbeschleunigung sondern auch
die Beschleunigung des Quadrokopters. Wenn man "heizen" will eher nicht
geeignet zum fliegen. Gruß Andreas
Vielleicht hilft das folgende Dokument: http://www.wpi.edu/Pubs/E-project/Available/E-project-042308-215545/unrestricted/Report_Main.pdf
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.