Hallo zusammen, zuerst muss ich sagen: Ich hab viel gegoogelt und auch was gefunden zu dem Thema, aber letztendlich stellte sich heraus, dass es nicht wirklich gut war und naja soviel findet man nicht wirklich zu diesen Elementen, außer Wikipedia vllt ein bisschen, aber das beantwortet nicht meine Fragen. ich muss für die nächste Klausur die Elemente der Regelungstechnik lernen, also PD, Integrierglied, Differnzierer, PT1 etc. Die Grundelemente sind ja eigentlich: Proportional-, Differenzial- und Integrierglied. Das Proportionalglied ist ja erstmal nur ein Sprung. G(s)=k lautet die Übertragungsfunktion. Also ich verstehe netmal warum diese einfach k lautet? Naja gut vielleicht aus der Formel, aber so mit reinen Überlegungen, hm... Xa(s) = k*Xe(s) naja und das Verhältnis von Ausgang zu Eingang ist halt die Übertragungsfunktion und darum halt k Gibt es da eine logischerer Erklärung? Was ist denn eine Sprungantwort jetzt genau? So wie das Signal am Ausgang aussieht? Beim P-Glied wäre das ein Sprung. Bodediagramm: Phasendrehung ist 0°, da sich einfach nichts ändert, ist eig. logisch. ist nicht Frequenzabhängig, warum? Differenzierglied: Die Sprungantwort ist ein Dirac-Impuls, aber warum? Zum Bodediagramm: Dieses kommt vom negativen geht durch die frequenz-achse und geht hoch ins positive, beide seiten der strecke gehen ins unendliche. Warum? Wie kann ich das verstehen? Integrierglied: Warum ist hier z.B. die Sprungantwort eine lineare Funktion? von 0 aufsteigend ins positive? Das Bodediagramm sieht genau umgekehrt aus wie beim Integriererglied. Wie passt das denn alles zusammen. Kann mir einer das erklären bitte? Und was muss ich noch wissen bei den 3 Elementen z.B.? Den Punkt wo die Funktion die f-Achse durchgeht, ist ja die durchtrittsfrequenz 1/k beim Diff. und k beim Integrierglied. Was sagt das jetzt aus? Bitte erklärt mir die 3 Grundelemente, sodass ich das verstehe und somit kann ich dann auch PD, PT1 etc. leichter vertehen. Danke! mfg
Eine recht gute Einführung finde ich die Dokumentation zur AVR Application Note 221. Es werden die drei grundlegenden Controllerelemente beschrieben, ihre Abstimmung mit Ziegler-Nichols und die mathematischen Grundlagen: http://www.atmel.com/images/doc2558.pdf
Das Problem ist, mein English ist leider noch nicht so gut ausgereift, sodass ich das alles gut verstehe. Ich studiere Regelungstechnik nicht(bin 1 Jahr vor der Matura(Abi)), ich brauch nur ein paar wichtige Hinweise zu den 3 Elementen und die ich auch verstehe. Kannst du mir sie vielleicht erklären bitte? Oder jemand anders?
beginner123 schrieb: > Das Proportionalglied ist ja erstmal nur ein Sprung. G(s)=k lautet die > Übertragungsfunktion. Also ich verstehe netmal warum diese einfach k > lautet? G(s) = Xa / Xe = k Die Übertragungsfunktion gibt den Quotienten von Ausgang durch Eingang an, also eigentlich einen Verstärkungsfaktor. Das P-Glied ist das einfachste Glied, daher besteht die Übertragungsfunktion nur aus einer Konstanten. > Was ist denn eine Sprungantwort jetzt genau? Eine Sprungantwort ist die Antwort eines Systems auf die Sprungfunktion. Die Sprungfunktion springt an der Stelle 0 von 0 auf 1, diese wird in das System eingespeißt und am Ausgang kann die Antwort (Sprungantwort) aufgenommen werden. Aus der Sprungantwort kann dann die Übertragungsfunktion des Systems ermittelt werden. > So wie das Signal am > Ausgang aussieht? Beim P-Glied wäre das ein Sprung. Richtig: Einangssignal Sprung, Ausgangssignal Sprung -> Das System ist ein P-Glied. > Bodediagramm: Phasendrehung ist 0°, da sich einfach nichts ändert, ist > eig. logisch. ist nicht Frequenzabhängig, warum? Da im Term nirgends die Frequenz (f oder omega "w") auftaucht. y = 10x ist ja auch nicht von t abhängig, oder? :-) > Differenzierglied: > Die Sprungantwort ist ein Dirac-Impuls, aber warum? Die D-Glied differenziert (->Ableitung) das Eingangssignal. Kann man sich so vorstellen, dass die Steigung des Eingangssignals am Ausgang rauskommt. Bei einem Sprung ist nur an der Stelle 0 die Steigung quasi unendlich, sonst überall 0. > Zum Bodediagramm: Dieses kommt vom negativen geht durch die > frequenz-achse und geht hoch ins positive, beide seiten der strecke > gehen ins unendliche. > Warum? Wie kann ich das verstehen? Meinst du das Amplitudendiagramm? Ein D-Glied hat für höhere Frequenzen eine größere Verstärkung. Lässt sich sehr schön über Fourier / Laplace zeigen, dennke aber, dass das für die zu weit geht, wenn du noch im Abi bist. > Integrierglied: > Warum ist hier z.B. die Sprungantwort eine lineare Funktion? von 0 > aufsteigend ins positive? Das Bodediagramm sieht genau umgekehrt aus wie > beim Integriererglied. Wie passt das denn alles zusammen. Ein I-Glied integriert das Einganssignal (-> Integral) Wenn am Eingang ein Wert größer 0 anliegt, wird am Ausgang der Eingangswert dauernd erhöht. Bei einem Eingangswert kleiner 0 dauernd erniedriegt. Bei einem Wert 0 am Eingang wird das Ausgangssignal garnicht verändert. Es wird also dauernd das Eingangssignal zum Ausgangssignal dazugezählt oder eben aufintegriert. Hoffe das hilft. Es wäre vielleicht sinnvoll, deine mathematischen Kenntnisse zu wissen, um die Sache besser erklären zu können. Ableiten / Integrieren bekannt? E-Funktionen? Vielleicht sogar Fourrier- oder Laplacetranformation?
Im Bodediagramm steht, wie stark ein Sinus mit der Amplitude von eins bei einer gegebenen Frequenz verstärkt wird. Integrier mal einen Sinus und schau an, was vor dem Integral steht. Das ist nicht zeitabhängig (von t), sondern von der Frequenz, also f bzw. omega. Und genau dieser Faktor taucht im Bodediagramm auf! Das omega steht unterm Bruch, der Faktor witd also mit steigender Frquenz kleiner. Genauso bei einem abgeleiteten Sinus, da kommt in der Ableitung ein frequenzabhängiger Faktor vor den cosinus. Das omega steht im Zähler, also wird dieser Faktor mit steigender Frequenz größer, genau das Verhalten eines Differenzierers.
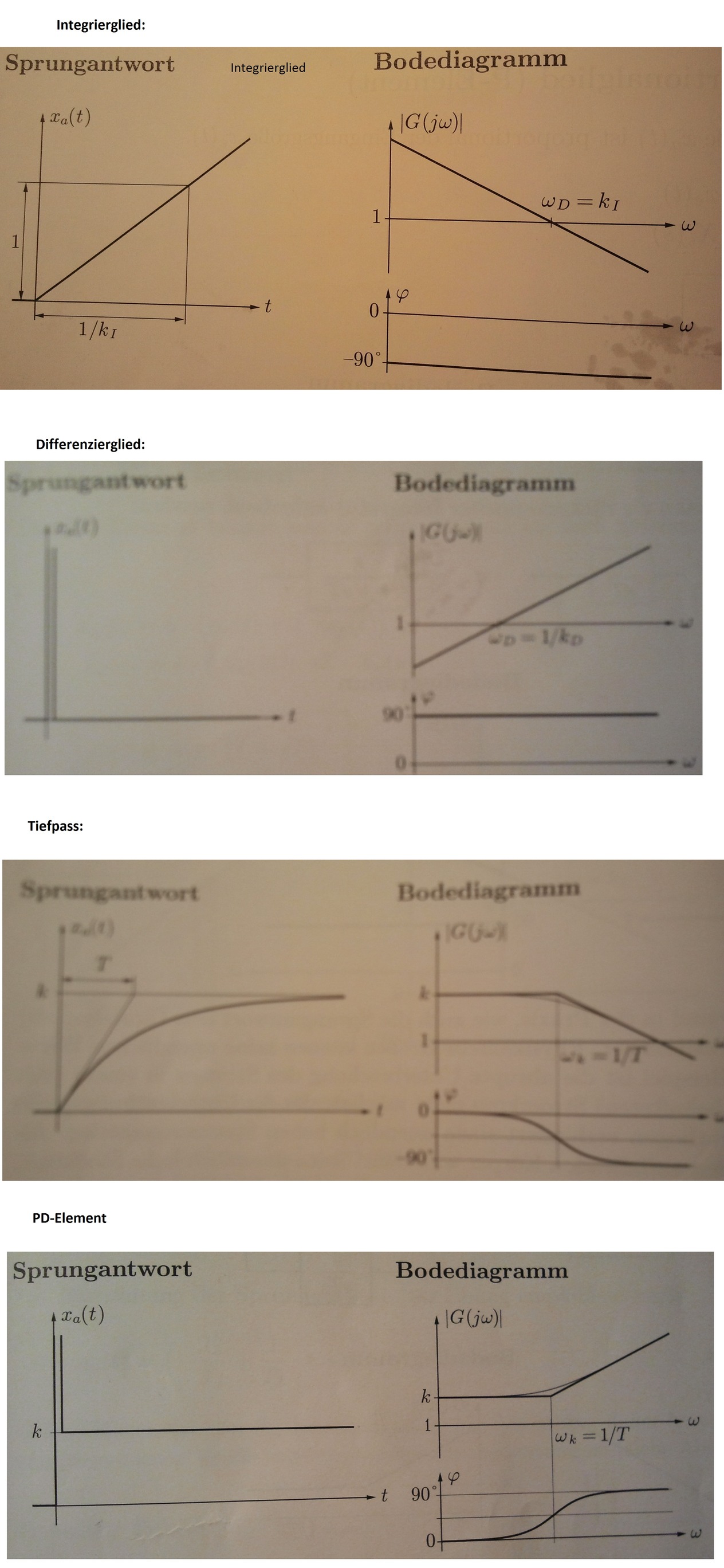
Angehängte Dateien:
-

elements.jpg
410 KB
Ok, danke. Es wird schon langsm klarer. Also Ableitung/Integrieren ist mir bekannt. Laplace-Transformation nur soweit mit hilfe der Tabelle und mit Hilfe von Partialbruchzerlegung umwandeln. Ja ich weiß nur das e-funktionen exponentiell ansteigen, so ne Art Kondensatorladekurve, aber genauer weiß ich auch nichts. Ich hab hier nun ein Bild mit nem Integrierglied, Diff-glied etc. Integrierglied: Bei der Sprungantwort, warum ist bei xa=1, t=1/ki. Was bedeutet das? Beim Bodediagramm ist wd(durchtrittsfrequenz)=ki, warum was heißt das jetzt genau? Differenzierglied: Beim Bodediagram ist wd=1/kd, selbe Frage wie beim Integrierglied. PT1-Element: Ist ja eigentlich ein Tiefpass, aber hab nocht nicht so viel darüber gehört. Warum gibt es da eine "zeitliche Ableitung"?: xa(t) + T*xa'(t)=k*xe(t) Was hat diese Gleichung zu bedeuten bzw. wie kommt man auf diese? Es steht auch noch: Ein PT1-Element kann als rückgekoppelter Integrat aufgefasst werden, warum und was bedeutet das genau? Eine Rückkopplung würde ja bedeuten das das signal immer um 90° Phasenverschoben wird. Sprungantwort: Nähert sich k an, weil? Warum eine gerade zu T gezeichnet? Wieso schaut hier die Sprungantwort so aus und warum schaut das Bodediagram gerade so aus. Ich mein ich kann jetzt einfach in die Gleichung einsetzen und dann weiß ich warum, aber ich möchte es ja verstehen. Bitte erklärt mir dieses PT1-Element. PD-Element: Also hier stecken ja schon 2 Wörter drinnen: proportional und differenzial. xa(t)=k*(xe(t) + T*xe'(t)) Warum wird hier proportional und differenzial einfach addiert? Was hat das zu bedeuten? Sprungantwort: Naja an der Sprungstelle ist Steigung unendlich und ansonsten ist diese k, warum genau? Bodediagramm: Naja man sieht zuerst k und dann steigt es an, Phasendrehung kann man das so machen solange keine Steigun da ost 0 und wenns ansteigt im amp-diagramm, dann 90°. Aber wie so sieht das so aus, wie es am Bild aussieht halt. Wie kommt das so zustande?
Vielleicht nochmal sehr stark vereinfacht. Klassisch hast du einen PID - Regler. P ist der proportionale Anteil, das wäre die Kompensation, welche direkt vom Eingangswert ab gelitten wird. Beispiel: Kurvenfahrt - Gewünschte Spur weicht von der aktuell gefahrenen ab, also wird gegen gelenkt. Wird dies aber nur in Abhängigkeit von der jeweils vorhandenen Abweichung vorgenommen (es wird immer nur t_aktuell betrachtet), wird ein solches System zum Schwingen neigen. Deswegen kommt der integrale Anteil hinzu - dieser sorgt praktisch dafür, dass die gesamte Kompensation nur schrittweise vorgenommen wird und verhindert so das (Über) Schwingen. Jetzt kann es aber immer noch zu einem Drift kommen (Regel und Stellgröße wandern langsam auseinander) - dies kompensiert die differentielle Komponente.
Bzw - oben bereits genannt: Ziegler-Nichols ist eine gängige (iterative !) Methode zum Einstellen eines PID, ggf. nochmals danach suchen, sollte weitere Beispiele zu Tage bringen.
Danke, aber vielleicht kann mir einer doch die 4 Elemente im Bild oben erklären, wenn ich diese verstehe, dann kann ich mir auch vielleicht PI-Element, IT1-Element zusammenreimen. Ich muss ja nur wissen wie die Sprungantwort bzw. Bodediagramm zusammenkommt und was das wd etc. bedeutet.
beginner123 schrieb: > ... bzw. Bodediagramm > zusammenkommt und was das wd etc. bedeutet. Ich gebe dir mal einen Tipp zum Bodediagramm: Stelle die Formel für die Übertragungsfunktion auf und bilde deine Grenzwerte. w -> 0 und w -> unendlich. Dann siehst du schon einmal, wie der Verlauf in etwa gehen muss. Damit du den Knickpunkt herausbekommst (soweit einer vorhanden ist, siehe Tiefpass) musst du beide Grenzwerte gleichsetzten (der Knickpunkt ist der Schnittpunkt beider Asymptoten). Die Formel für |G(jw)| kennst du oder? Dort deine Werte für w -> 0 und w -> unendlich einsetzten damit du herausfindest, um wieviel dB/w (z.B.) abfällt. Der Knickpunkt wird idR als w1 bezeichnet übrigens (also beide Grenzwerte gleichsetzten und nach w auflösen = w1). Mit dem w1 in |G(jw)| eingesetzt fängst du quasi an und anschließend 10*w1 z.B. damit du weißt, um wieviel dB dein Verlauf von w1 auf 10*w1 abfällt. Wie man den Grenzwert bildet weißt du, oder? Beachte dabei, dass du nicht 0 bzw unendlich direkt einsetzt, sondern schaust, was schneller gegen 0 bzw. gegen unendlich verläuft. Hast du zB y = x^2 + x + 10 ist der Grenzwert für x -> unendlich nur y = x^2 da x ("unendlich") bzw. 10 gegenüber x^2 ("unendlich^2") zu vernachlässigen ist. Nur als Beispiel. Hast du das ganze im Nenner stehen musst du dann natürlich dementsprechend umdenken. Verstaendlich gewesen?
Nicht wirklich. G(s) beim Tiefpass ist ja k/(1+sT). Im Zeitbereich wäre das: 1/T*e^-(t/T). soll ich das 1/T durch w ersetzen, sodass es frequenzabhängig wird? Für t was einsetzen? Aber was bringt jetzt endgültig das ganze? Ich verstehe das nicht wirklich.
Aso ne blödsinn, ich war jetzt voll verwirrt. G(s) = k/(1+sT) --> G(jw) = k/(1+jwT) --> |G(jw)| = k/(sqrt(1+w^2*T^2)) Ok, gut jetzt habe ich den Betrag von Ü-Funktion. Was soll ich an der Stelle für k einsetzen? Oder für T?
beginner123 schrieb: > Ok, gut jetzt habe ich den Betrag von Ü-Funktion. Was soll ich an der > Stelle für k einsetzen? Oder für T? k und T sind Parameter (sagt man so?) des PT1-Glieds, daher sind die beim Bild eines PT1-Glieds auch angegeben. k ist die Verstärkung, T die Zeitkonsante. Wenn du ein konkretes PT1-Glied vorliegen hast, sind diese Parameter mit Werten belegt. Damit lässt sich das Ganze dann in Zahlenwerten ausrechnen. Andersrum geht das natürlich auchh, du möchtest eine bestimmte Eckfrequenz und eine bestimmte Verstärkung und kannst dir die passenden Werte für k und T errechnen. http://de.wikipedia.org/wiki/PT1-Glied
Angehängte Dateien:
-

elements2.jpg
1,5 MB
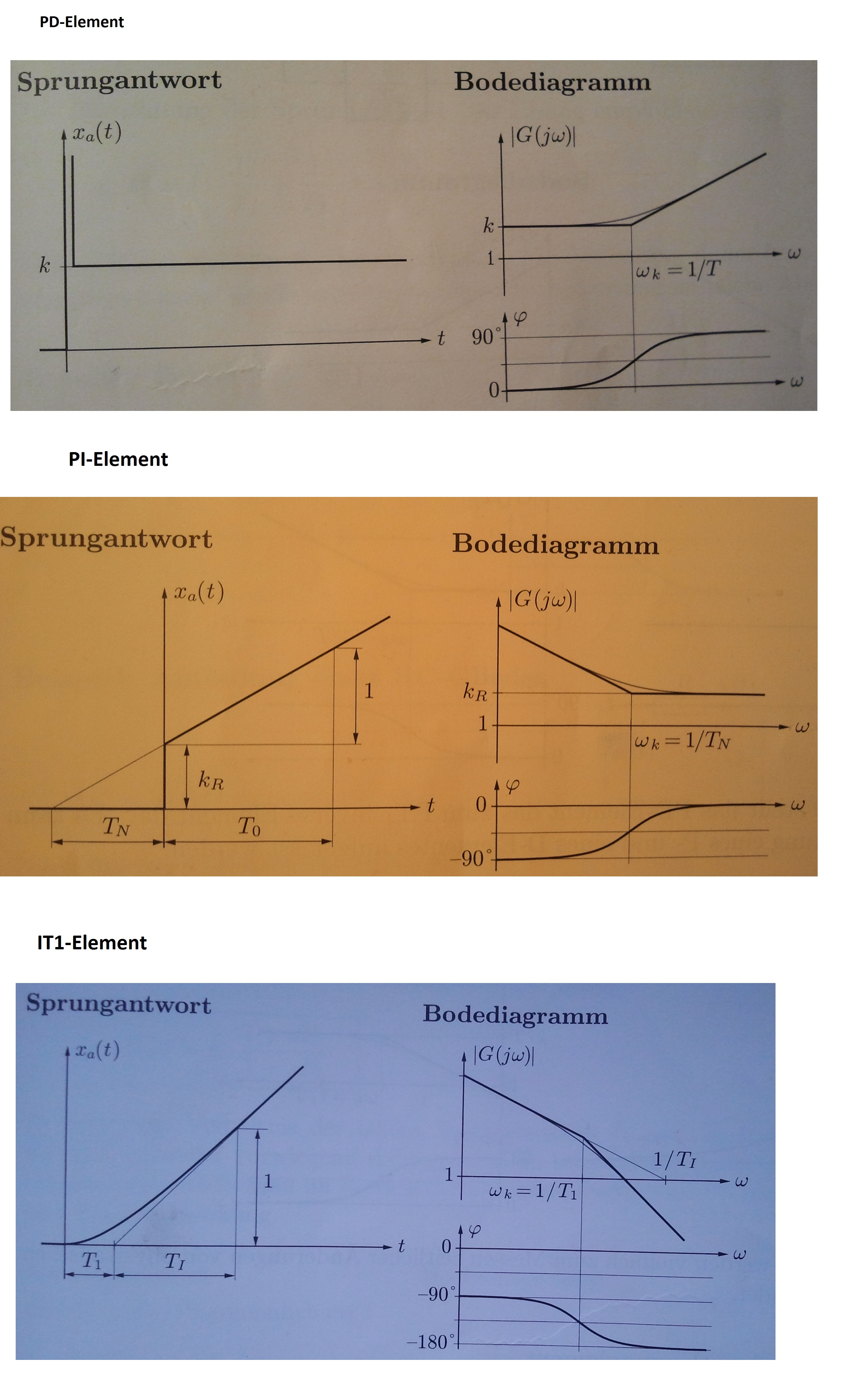
also zu der Klausur sollte ich auch die Elemente können. PD: xa(t) = k*(xe(t) + T*xe'(t)) G(s) = k*(1+sT) PI: xa(t) = k*(xe(t) + 1/Tn*int(xe(t) dt) G(s) = k*(1 + 1/(sTn)) IT1: xa(t) = (-T1/Ti+1/Ti*t + -T1/Ti*e^(-t/T1))*sigma(t) G(s) = 1/(sT*(1+sT)) Naja wenn ich die einfach auswendig lerne, hat es nicht sooo viel Sinn. Was muss man denn da wissen über diese Elemente? Ich meine wenn irgendein Element bei der Klausur gefragt wird, muss ich es aufzeichnen und eventuell auch berschreiben. Ich bin noch vor der Abitur, d.h. ich muss jetzt nicht da aufwendig herumrechnen, oder so, nur bisschen erklären. Der PD besitzt ja proportionials und differnzierendes Verhalten. Man legt eine Sprung an und es kommt das raus was auf dem Bild ist, der Stelle 0 ist die Steigung unendlich hoch, und dann gehts bei k weiter, wegen dem proportionalglied. Was kann ich hier z.b. Beim Bodediagramm sagen? Wie kann ich mir das leicht merken? Zumindest das Betragsdiagramm, denn das Phasendiagramm kann man ja leicht vom Betrags. ableiten. Das PI-Element besitzt prop. und integrales Verhalten. Sprungantwort ist ja so ähnlich wie bei PD, nur naja es springt halt rauf um k und geht dann linear weiter, also Flächenberechnung. Bodediagramm selbes Rätsel wie bei PD. Das IT1-Element ist ein Integrator und PT1. Also dieser ist irgendwie schwieriger. Naja durch den PT1, hat die Sprungantwort leichte Krümmung und eine zeitliche Verzögerung. Betrags-diagramm weis ich auch nicht wirklich wie es zu stande kommt bzw. was man dazu sagen soll. Also eins ist ja schon mal klar, ich könnte jetzt für die einzelnen Übertragungsfunktionen für omega bestimmte werden einsetzen und so halt das Bodediagramm zeichen, aber gibt es dan vielleicht eine kleine Hilfestellung. Es sollte ja möglichst schnell gehn. Nochmals eine kleine Zusammenfassung der Fragen: Also, was soll ich zu den ganzen Bodediagramm und Sprungantworten sagen? Ich hab ja schon etwas dazu gesagt, ist das auch richtig? Was heißt z.b. die ganzen Zeitkonstanten T, die auf der Sprungantworten erscheinen, warum sind diese so, wie sie sind? Naja und kann man auch irgendetwas wichtiges zu der xa(t)-formel sagen. Und G ist ja auch hier das Verhältnis xa zu xe. Allein schon beim IT1, das merken von xa(t) ist ja extrem aufwendig. Danke im voraus!
beginner123 schrieb: > Ich hab viel gegoogelt und auch was gefunden zu > dem Thema, aber letztendlich stellte sich heraus, dass es nicht wirklich > gut war und naja soviel findet man nicht wirklich zu diesen Elementen, > außer Wikipedia vllt ein bisschen, aber das beantwortet nicht meine > Fragen. Jan Lunze: Regelungstechnik 1: Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen (Springer-Lehrbuch) Serge Zacher: Regelungstechnik für Ingenieure: Analyse, Simulation und Entwurf von Regelkreisen (Viewegs Fachbücher der Technik) [Taschenbuch] Gerd Schulz: Regelungstechnik 1: Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf [Taschenbuch]
beginner123 schrieb: > Also, was soll ich zu den ganzen Bodediagramm und Sprungantworten sagen? Die Sprungantowrt eines zusammengesetzten Systems ist die Summe der einzelnen: PI = P+I , PD = P+D, PID = P+I+D
Junge, was auch immer du machst: so funktioniert das nicht. 1. du bist alt genug, um in eine Bibliothek zu gehen. 2. du schreibst, dass das irgendwann mal in einer Klausur kommen könnte - dann wurden die Inhalte mit großer Wahrscheinlichkeit sicherlich auch mal behandelt oder du machst dir wegen nichts viel zu sehr einen Kopf... Ich würde mal ganz stark anzweifeln, dass du das so im Detail brauchst... 3. eine einfache Einführung bekommst du durch Lernsoftware oder Unterlagen, die auch in der Ausbildung für Elektroniker verwendet wird. Für tiefergreifende Inhalte müsstest du Bücher anschauen oder in einer Vorlesung gehen. Letzteres gibt es sicherlich auch irgendwo online. Trotzdem bezweifle ich, dass du das so detailliert brauchst.
Angehängte Dateien:
-

bsp2.jpg
220 KB
{kind=link}
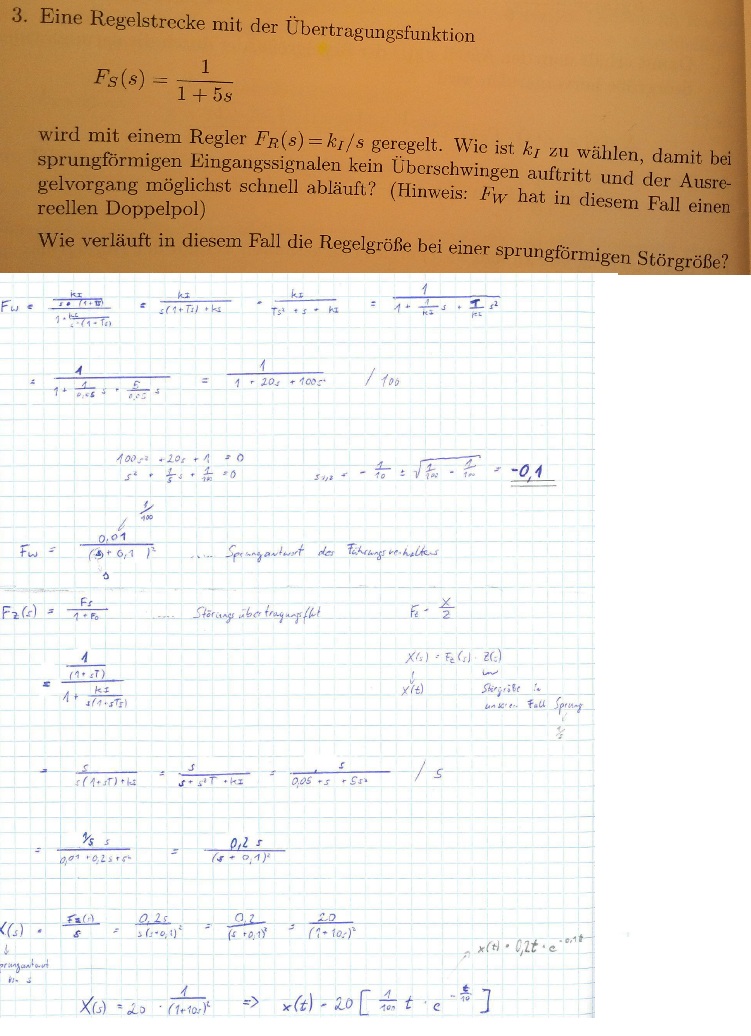
Hm ja eh, detailliert muss ich es ja eh nicht können, ich muss ja nur ein paar Sätze zu den Bodediagrammen bzw. Sprungantworten wissen, nicht wirkliches groß da rechnen. Kann mir z.b. hier einer erklären, wie man da auf das k kommt? Der Rechnungsweg ist dabei, aber ich kann denn nicht nachvollziehen, kann mir jemand noch das erklären bitte? Also Führungsübertragungsfunktion ausrechnen ist klar, dass verstehe ich, aber wie man auf das k kommt, habe ich keinen blassen Schimmer. Man kann doch nicht einfach so mit einer einfachen formel schauen ob der Regelkreis überschwingt oder nicht, oder? Schwingt ja nur über wenn einer Verzögerung z.b. drinnen ist. Und den Hinweis hier kapier ich auch nicht, wie soll der mir weiterhelfen? Reeler Doppelpol hat nichts mit Überschwingen zu tun?
beginner123 schrieb: > Schwingt ja nur über wenn einer Verzögerung z.b. drinnen ist. > Reeler Doppelpol hat nichts mit Überschwingen zu tun? Bitte beschäftige dich mit stabilen ind instabilen Regelkreisen, den zugehörigen PN-Darstellungen sowie den Ortskurven. In einem Forum wie diesem, können nicht in zehn Sätzen, 2 Semester Regelungstechnik aufgeholt werden.
2 Semester? Nein, wir haben das erst vor 1 monat angefangen das Thema mit dem Standardregelkreis und mir wurde gesagt, man kann den reelen doppelpol, bei diesem beispiel ausnutzen, in dem man k so wählt das in der Wurzel 0 vorkommt. Aber wir wählen k schon bevor wir die Wurzel sehen, ich möchte nur das erklärt haben. Ich möchte ja nur wie man mir den Rechengang auf dem Zettel erklärt. Da steckt ja keine Fourier-Transformation oder ähnliches dahinter, sowas haben wir noch nicht einmal gelernt. Nur laplace-Transformation mit hilfe der Tabelle. Darum bitte ich euch.
beginner123 schrieb: > Aber wir wählen k schon bevor wir die Wurzel sehen, ich möchte nur das > erklärt haben. Nehme die Lösungsformel für eine quadratische Gleichung. Wie groß ist p, damit die Lösung eine reelle Doppelwurzel ergibt?
Nur auf die pq-formel bezogen? naja p muss so groß sein, dass unter der wurzel ein negetiver Wert rauskommt und dann ist es ein doppelpol?
Falsch, bei einem Doppelpol ist die Wurzel Null!
Achso ja, die Punkte findet man auf der reelen Achse..., aber wenn ein - unter Wurtel ist, dann sinds ja komplexe Doppelpole? Auf jedenfall ist es komplex. Nur wie komme ich jetzt auf das k? bzw. auf das p? Ich steh an.
beginner123 schrieb: > Nur wie komme ich jetzt auf das k? bzw. auf das p? Ich steh an. Indem du bei gegebenen q das p so wählst, dass die Wurzel Null wird.
beginner123 schrieb: > aber wenn ein - > unter Wurtel ist, dann sinds ja komplexe Doppelpole? Nein, dann ist die Lösung komplex!
Zuerst ist ja noch der Vorfakter beim s^2 da, den muss ich ejtzt mal wegbekommen in dem ich das ganze durch dme vorfakter dividiere. Das Problem ist in dem Vorfaktor ist das k drinnen und, ich dividiere ja auch das q, dann doch diesen vorfaktor, also ist das q unbekannt. Wie kann man das dann lösen, wenn alles unbekannt ist?
beginner123 schrieb: > Wie kann man das dann lösen, wenn alles unbekannt ist? Durch simples umstellen.
Ah ok danke. Aber warum muss man das auf die Form 1/.... bringen? und dann steht im Nenner jene Formel wo man dann das k ausrechnen muss? Um das k einfach von oben wegzubringen, dass es reicht, wenn man nur im Nenner die Formel löst? Würde man das k nicht wegbringen oben, dann müsste man noch irgendwas im Zähler machen um auf das richtige k zu kommen, richtig? Was ist wenn kein Bruch vorkommt? Einfach dann dasselbe anwenden wie im Nenner vom vorigen Bsp? Man findet da ja gar nichts im Internet über Doppelpol und so. 2 Polstellen = Doppelpol? Wenn der wert unter der Wurzel neg. ist, dann ist es komplex, ja. Ich bin grad voll verwirrt, mit diesen ganzen Doppelpole und so. Kannst du mir es bitte erklären, wann jetzt was genau ist?
beginner123 schrieb: > Aber warum muss man das auf die Form 1/.... bringen? Weil das eine Forderung des Stabilitätskriterium ist. Ein Regelkreis ist stabil oder asymptotisch stabil wenn die Lösung der zugehörigen homogenen Dgl. für beliebige Anfangsbedingungen bei t gegen unendlich gegen Null geht. beginner123 schrieb: > Man findet da ja gar nichts im Internet über Doppelpol und so. 2 > Polstellen = Doppelpol? Es gab auch mal eine Zeit vor dem Internet. Du wirst dich sicherlich nicht mehr daran erinnern. In dieser Zeit nutze man BÜCHER zur Weitergabe von Wissen. Zu deiner Frage. Die Anwort findest du in jedem Mathebuch der linearen Algebra.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.