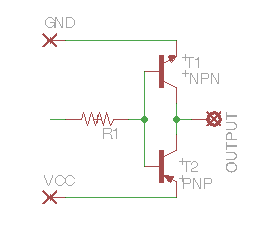
Als Treiber für einen Schrittmotor, der Pulse mit jeweils wechselnder Polarität braucht, würde ich gerne einen NPN und PNP so beschalten wie im Diagramm. Am anderen Eingang des Schrittmotors hängt ein Elko gegen Masse, der jeweils beladen oder entladen wird. Die Basis der Transistoren steuert ein Attiny an. Frage, funktioniert das so mit den Transistoren, um je nach High/Low auf der Basis am Ausgang VCC oder GND zu haben, oder habe ich da einen Denkfehler drin?
Angehängte Dateien:
-

schaltung.png
3,2 KB
Wenn die Spannungsquelle gut ist, so wird die Schaltung wohl nur ein paar mikroSekunden überleben. Beide Emitte-Basis-Strecken liegen in Reihe und dirket an der Versorgung. Das wird warm und der magische Rauch steigt auf.
Guck dich mal der Datasheet von Texas Instruments L293(D) an. Da stehen verschiedene Prinzip-Diagramme in. Benutze diesen Chip oder wenn du wirklich wollst Bau das selber mit Transistoren, da brauchst du aber eine andere Schaltung als du presentiert hast.
> Wenn die Spannungsquelle gut ist, so wird die Schaltung wohl nur ein > paar mikroSekunden überleben. > > Beide Emitte-Basis-Strecken liegen in Reihe und dirket an der > Versorgung. Das wird warm und der magische Rauch steigt auf. Nein, das passiert nicht, weil er die Transistoren vertauscht hat. Die Schaltung macht gar nichts.
Zur gezeigten Schaltung alleine: Beide Strecken BE leiten wegen der miteinander verbundenen Basen. Abhilfe schafft es, beiden Basen separate Vorwiderstände zu verpassen.
ArnoR schrieb: > Nein, das passiert nicht, weil er die Transistoren vertauscht hat. Die > Schaltung macht gar nichts. Dann schau nochmal, wo Vcc und GND ist. Es wäre ja zu einfach, das in "üblicher" Weise zu zeichen ;-))
Spontan, ich muss nochmal fragen um es genau zu verstehen. Liegt das Problem darin, daß die Basis in Reihe geschaltet ist, d.h. würde je Basis ein Widerstand zum Attiny das Problem vermeiden? Meinem Verständnis nach schaltet bei Basis High der NPN GND durch, und bei Basis Low der PNP VCC, d.h. die sollten sich theoretisch nicht in die Quere kommen. Oder ist das zu kurz gedacht? Patrick, danke, schaue ich gleich mal rein. Der Schrittmotor braucht nur langsame Einzelimpulse (mechanischer Zähler), d.h. der L293 ist vielleicht schon etwas zu gut für die Anwendung.
Ist der Schrittmotor mit ~4V zufrieden (bei VCC=5V)? Wenn ja, dann tut es ein Transistorpaar. Wenn nicht, bist du mit einem Halbbrücken-IC oder evtl. einem MOSFET-Treiber einfacher dran.
Dietrich L. schrieb: > Dann schau nochmal, wo Vcc und GND ist. Es wäre ja zu einfach, das in > "üblicher" Weise zu zeichen ;-)) Ja, hab ich übersehen.
Angehängte Dateien:
-

schaltung2.png
3,4 KB
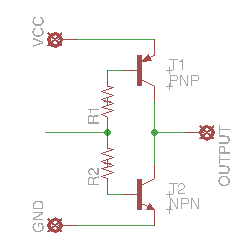
prx, guter Punkt! Der Schrittmotor liegt etwas drüber, hatte gehofft das ich das durch eine längere Pulsbreite kompensieren kann. Danke für den Mostet/Halbbrücken Tip, schaue ich mir an. Anbei korrigierte Schaltung mit zwei Vorwiderständen und GND unten.
Karl schrieb: > Anbei korrigierte Schaltung mit zwei Vorwiderständen und GND unten. Aber beachte: hier fließt beim Umschalten ein u.U. hoher Querstrom! Also muss bei der Schaltung - sehr schnell umgeschaltet und/oder - ein Strombegrenzung vorgesehen werden. Gruß Dietrich
Dietrich L. schrieb: > Aber beachte: hier fließt beim Umschalten ein u.U. hoher Querstrom! > Also muss bei der Schaltung > - sehr schnell umgeschaltet und/oder > - ein Strombegrenzung vorgesehen werden. ... und man muss sich ganz sicher sein, dass der Controller nie in den Reset gerät oder neu programmiert werden muss. M.a.W: Das ist immer noch Käse. Eine Komplementärtreiberstufe funktioniert andersrum. Natürlich hat man dann weniger Spannung.
Ich habe mir gerade ein paar Halbbrücken Datenblätter angesehen, das scheint genau mein Problem zu lösen. Vielen Dank an alle für den Support!
Karl schrieb: > Als Treiber für einen Schrittmotor, der Pulse mit jeweils wechselnder > Polarität braucht, Apropos: Wie erzeugst du mit deiner Halbbrücke wechselnde Polarität? Kann es sein, dass du in Wirklichkeit eine Vollbrücke brauchst?
Karl schrieb: > schaltung.png Üblicherweise werden die Emitter in die Mitte genommen. Sieh Dir z.B. mal typische NF-Verstärkerschaltungen an. Gruss Harald
> d.h. der L293 ist vielleicht schon etwas zu gut für die Anwendung. Ueberliege dir dieser Aussage nochmal. Um einen Schrittmotor zu steuern musz man mindestens 4 Transistor-paren benutzen, dabei die wiederstande und man musz unbedingt 2 dioden pro Transistor-par benutzen (ich weisz nicht wie man dies auf Deutsch nennt, Niederlaendisch=blusdioden oder 'tegen-emk' diode, back-emf oder flyback-diode) weil man sonnst zu hohe strom-pegeln bekommt und die transistoren gehen kaput. Der L293D (16-pin chp) hat genau die schaltung die du brauchst incl blusdioden, ist einfach zu benutzen, hat wahrscheinlich genuegend strom fuer deinen Schrittmotor und ist denke ich einfach zu kaufen und nicht teuer. L293 kann auch aber dann musz du die blusdioden extern setzen. Setze ihm in ein fueszchen (oder wie heist das) so das er einfach gewechselt werden kann wenn kaput. http://www.ebay.de/itm/10-Stucke-L293D-Stepper-Motor-Treiber-Driver-Chip-Motortreiber-/290607578207?pt=Bauteile&hash=item43a98fbc5f
Löschdioden wäre vermutlich ein passender Begriff, und für den 2. Absatz "Sockel" oder "IC-Fassung". Mit freundlichen Grüßen Thorsten Ostermann
Patrick C. schrieb: > Ueberliege dir dieser Aussage nochmal. Um einen Schrittmotor zu steuern > musz man mindestens 4 Transistor-paren benutzen, dabei die wiederstande > und man musz unbedingt 2 dioden pro Transistor-par benutzen Patrick, mit "zu gut" meinte ich nur das der L293D vier Kanäle hat und eigentlich brauche ich nur einen wenn ich das Datenblatt richtig verstehe (und ich hab nur noch wenig Platz auf der Platine). A. K. schrieb: > Karl schrieb: > Apropos: Wie erzeugst du mit deiner Halbbrücke wechselnde Polarität? > Kann es sein, dass du in Wirklichkeit eine Vollbrücke brauchst? prx, das Datenblatt des 293D und der anderen H-Brücken hatte ich so verstanden, das die Ausgänge der H-Brücken die Polarität wechseln können, um die Drehrichtung des Motors zu ändern? ("...designed to provide bidirectional drive currents") Zum Hintergrund, der anzusteuernde "Schritt"motor ist aus einem mechanischen Zähler aus den Siebzigern. Das Zählen erfolgt relativ simpel durch eine Drehung des Motors in die eine, dann in die andere Richtung, den Rest erledigt die Mechanik. Die Pulslänge pro Bewegung in eine Richtung ist 300 ms. Die Pulszeit ist über die Kapazität des Elkos am zweiten Anschluss des Motors gesetzt. Aus der H-Brücken Übersicht hier auf der Site hab ich mir den Si9987 von Vishay rausgesucht, der ist als 8 Pin SOIC erhältlich. Spricht etwas dagegen, von dem nur einen Ausgang zu verwenden, und damit den Motor->Elko->Masse anzusteuern? http://www.vishay.com/docs/70864/si9987.pdf
Hi, Karl schrieb: > Patrick C. schrieb: >> Ueberliege dir dieser Aussage nochmal. Um einen Schrittmotor zu steuern ... > > Zum Hintergrund, der anzusteuernde "Schritt"motor ist aus einem > mechanischen Zähler aus den Siebzigern. Das Zählen erfolgt relativ > simpel durch eine Drehung des Motors in die eine, dann in die andere > Richtung, den Rest erledigt die Mechanik. Die Pulslänge pro Bewegung in > eine Richtung ist 300 ms. Die Pulszeit ist über die Kapazität des Elkos > am zweiten Anschluss des Motors gesetzt. bis Du sicher das es sich um einen Schrittmotor handelt? Kann es nicht auch sein das es einfach zwei Spulen sind die einen Hebel vor und zurück bewegen? Oder hast Du nur eine einzige Spule (dann ist es auch kein Schrittmotor) bei der Du die Polarisation welchseln musst, damit das Zählwerk einen "Schritt" macht? Poste doch mal Informationen zum Zählwerk ...
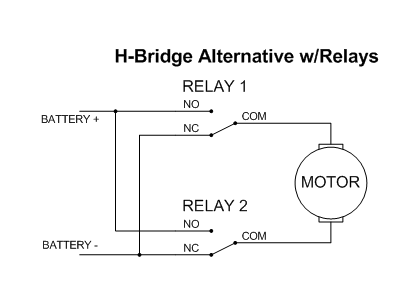
> Aus der H-Brücken Übersicht hier auf der Site hab ich mir den Si9987 von > Vishay rausgesucht, der ist als 8 Pin SOIC erhältlich. Spricht etwas > dagegen, von dem nur einen Ausgang zu verwenden, und damit den > Motor->Elko->Masse anzusteuern? Motor-Elko-Masse ? Du meinst einen Elko in Serie mit dem Motor ? Neh, dafuer brauchst du einen zu groszen Elko und keinen Polairen. Theoretisch koennte das funktionieren aber nicht Praktisch. Du brauchst einen Kompletten H-Brucke weil man fuer die eine richting +- am Motor schalten musz, fuer die andere seite -+. Vergleich es mit diese relay-schaltung : http://www.bibaja.com/images/relay_motor_control.png Also du brauchst 1/2 L293D oder 1 Si9987 (habe ich keine erfahrung mit, aber von datasheet aus funktioniert das. Die Frage ist, wie Wolfgang schon sagte, ist es wirklich ein 'schritt-motor' ? Wenn nicht kannst du auch vielleicht noch denken an ULN2003, geeignet um motoren in eine richtung drehen zu lassen. Also bitte poste mal ein foto von der Zahler und seine anschlusze.
Karl schrieb: > prx, das Datenblatt des 293D und der anderen H-Brücken hatte ich so > verstanden, das die Ausgänge der H-Brücken die Polarität wechseln > können, um die Drehrichtung des Motors zu ändern? ("...designed to > provide bidirectional drive currents") Wenn der Motor an GND hängt, dann sorgt eine Halbbrücke für wahlweise +V und GND am anderen Anschluss. Für wechselnde Polarität sorgen 2 gegenäufig betriebenen Halbbrücken aka eine Vollbrücke. Der L293D hat ja 4 Halbbrücken drin. Achtung: H-Brücke = Vollbrücke != Halbbrücke.
Wolfgang Heinemann schrieb: > bis Du sicher das es sich um einen Schrittmotor handelt? Kann es nicht > auch sein das es einfach zwei Spulen sind die einen Hebel vor und zurück > bewegen? Das ist kein Schrittmotor, sorry mein Fehler in der Beschreibung. Das sieht nach einem normalen Motor mit zwei Anschlüssen aus, der durch die Mechanik dahinter eine einfache Schrittmotorfunktion liefert. Die Mechanik bewegt eine Rollenanzeige schrittweise weiter. Patrick C. schrieb: > Motor-Elko-Masse ? Du meinst einen Elko in Serie mit dem Motor ? Neh, > dafuer brauchst du einen zu groszen Elko und keinen Polairen. Der Elko hat 680 uF, durch die Be- und Entladung bekommt der (recht kleine) Motor genug Energie für das weiterschalten. Das hat den Vorteil das ich im Mikrocontroller keinen weiteren Timer für die ~300 ms der Schaltstufen brauche. > Theoretisch koennte das funktionieren aber nicht Praktisch. Du brauchst > einen Kompletten H-Brucke weil man fuer die eine richting +- am Motor > schalten musz, fuer die andere seite -+. Vergleich es mit diese > relay-schaltung : > http://www.bibaja.com/images/relay_motor_control.png Genau, das passt vom Prinzip, nur das ich dann die Schaltzeit selbst steuern muss. Das wollte ich mit der Motor/Kondensatorschaltung vermeiden. A. K. schrieb: > Wenn der Motor an GND hängt, dann sorgt eine Halbbrücke für wahlweise +V > und GND am anderen Anschluss. Für wechselnde Polarität sorgen 2 > gegenäufig betriebenen Halbbrücken aka eine Vollbrücke. Der L293D hat ja > 4 Halbbrücken drin. > > Achtung: H-Brücke = Vollbrücke != Halbbrücke. Ah, ok, verstanden. Hatte H-Brücke = Halbbrücke gelesen. Ich bräuchte nur +V und GND an einem Anschluss (durch den Kondensator an Masse am anderen Motoranschluss), demnach würde eine Halbbrücke ausreichen, korrekt?
Hast Du das Thema inzwischen gelöst? Wenn ja, wie? Kannst Du bitte ein Bild vom Zählwerk posten, das interessiert mich!
Angehängte Dateien:
-

anzeige.jpg
150 KB
{kind=link}
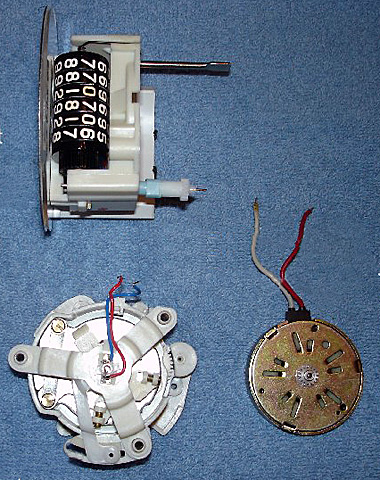
Wolfgang Heinemann schrieb: > Hast Du das Thema inzwischen gelöst? Wenn ja, wie? Kannst Du bitte > ein > Bild vom Zählwerk posten, das interessiert mich! Wegen Zeitmangel noch nicht aktiv dran weitergearbeitet, ich habe mir inzwischen aber zum Testen einige der Rohm BD6220F H Bridge Treiber bestellt. Im Datenblatt steht explizit eine Warnung, keinen Kondensator mit grosser Kapazität (was mein ursprünglicher Plan war) an den Ausgang gegen Masse anzuschliessen, da bei VCC oder VIN auf GND die Ladung zurückfliessen und den Treiber beschädigen kann. Gehe also vielleicht doch den Weg, den Motor komplett über den H Bridge Treiber zu betreiben, falls ich noch einen weiteren Port beim Attiny für die Ansteuerung freiräumen kann. Bild vom Zählwerk anbei (alter Tacho), der Motor zum Antrieb der Mechanik ist rechts unten, die Mechanik zum weiterschalten unten Mitte (zusammen mit dem Drehspulinstrument für die Geschwindigkeit), und oben die Rollenanzeige.
Karl schrieb: > Gehe also vielleicht > doch den Weg, den Motor komplett über den H Bridge Treiber zu betreiben, > falls ich noch einen weiteren Port beim Attiny für die Ansteuerung > freiräumen kann. Du schriebst doch, dass der langsam läuft. Kannst du da nicht einen Port multiplexen? Wenn du noch mal etwas genauer in die Technik der H-Brückenfunktion schauen willst, dann kann ich dir dieses Video empfehlen. https://www.youtube.com/watch?v=NyaOAJOG-zw
Hallo Karl, leider hatte ich den Thread ein wenig aus den Augen verloren. Danke für die Beschreibung des Zählwerks. Karl schrieb: > Wolfgang Heinemann schrieb: ... > falls ich noch einen weiteren Port beim Attiny für die Ansteuerung > freiräumen kann. > > Bild vom Zählwerk anbei (alter Tacho), der Motor zum Antrieb der > Mechanik ist rechts unten, die Mechanik zum weiterschalten unten Mitte > (zusammen mit dem Drehspulinstrument für die Geschwindigkeit), und oben > die Rollenanzeige. Der Motor treibt also die Mechanik an. Die Mechanik ist so konstruiert das sie, wenn der Motor genug angetrieben hat, die erste Walze weiter schaltet. Wozu sind die zwei Drähte auf der Mechanik? Ist da ein Schalter verbaut der Dir ein Signal liefert wenn die Walze weiter geschaltet wurde? Wenn dem so ist kannst Du die Zeit, die der Motor laufen muss, super mit Deinem Mikrocontroller steuern. Den Elko würde ich auf jeden Fall weg lassen. Das funktioniert per Software dann viel besser. Bist Du sicher das Du eine Brücke brauchst? Ich vermute das der Motor immer nur in eine Richtung laufen muss. Die Mechanik sollte dafür sorgen das Schrittweise geschaltet wird. Was passiert wenn Du Spannung an den Motor legst und keinen Impuls (über den Kondensator)? Möglicherweise ist der Impuls, durch den Kondensator, zu kurz um die Mechanik einmal komplett zu aktivieren und Du musst deshalb den Motor wieder zurück in die Ausgangsstellung fahren. Wenn das Timing stimmt (Endschalter auswerten) brauchst Du vielleicht den Motor nicht mehr rückwärts laufen zu lassen. Rückwärts zählen kann man vermutlich nicht. Es sieht so aus als wäre der schwarze Stift dazu da den Zähler von Hand auf "0" zu setzen. Daher halte ich es für sehr unwahrscheinlich das Du den Motor umpolen musst. Für die beschriebene Funktion genügt ein Tiny13. Du könntest das sogar diskret aufbauen, ganz ohne Mikrocontroller.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.