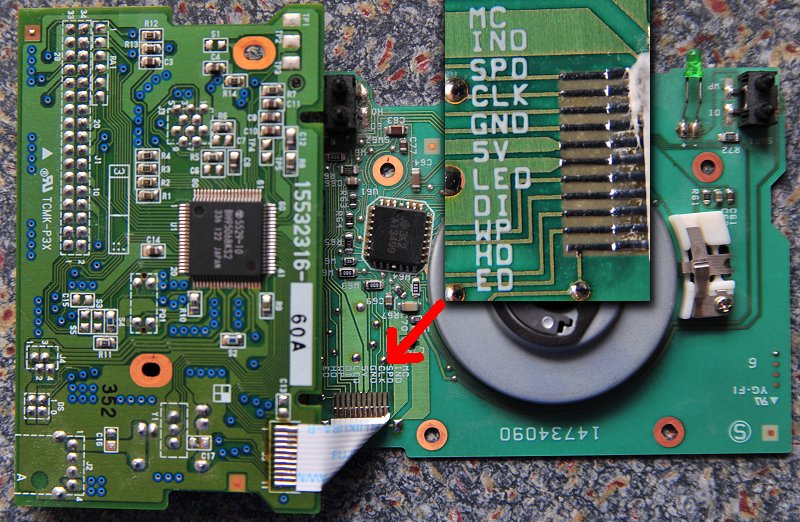
Hallo zusammen, mit Google habe ich nix gefunden und bevor ich nun versuche mit 'nem Logik-Analysator Reverse-Engineering zu betreiben, hat vielleicht jemand von Euch einen Tipp. Ich brauche für ein POV-Display einen Motor, der mit ca. 1500 .. 1800 U/min und konstanter Drehzahl dreht. Bevor ich nun eine einen BLDC mit Ansteuerung kaufe oder mir sonst was überlege, würde ich gern versuchen, einen Floppy-Motor auf diese Drehzahl zu bringen. Im Foto habe ich die Pinbelegung am Flachbandkabel vergrößert dargestellt. Auf dem Chip neben dem Motor steht "3K2 A13499". Das könnte ein 4-Kanal Audio-Treiber sein, aber "SPD" und "CLK" klingen eher nach "Speed" und "Takt". Ich hoffe, dass ich den Motor digital ansteuern kann. Hat jemand einen Tipp, oder muss ich den Logik-Analysator bemühen? VG Torsten
Angehängte Dateien:
-

Dsc_6018-Floppy.jpg
150 KB
Da bei 3.5"-Laufwerken die Drehzahl üblicherweise konstant ist, ist nicht davon auszugehen, daß damit die Geschwindigkeit geregelt wird. Höchstens wird sie zwischen zwei Werten umgeschaltet, das werden 300 und 360 U/min sein (letzteres ist bei 3.5"-Disketten allerdings unüblich, das gibt es nur beim nur in Japan relevanten 1.2MB-Format). Du müsstest den Motorcontroller dazu bekommen, mit fünf- bzw. sechsfacher Drehzahl zu arbeiten -- einfacher dürfte es sein, einen eigenen BLDC-Controller anzuschließen. Mit dem Motor aus einem CD-/DVD-Laufwerk bist Du vermutlich besser bedient, da ist die Motorelektronik auch darauf ausgelegt, die Drehzahl in einem sehr weiten Bereich zu verändern.
Torsten C. schrieb: > Ich brauche für ein POV-Display einen Motor, der mit ca. 1500 .. > 1800 U/min und konstanter Drehzahl dreht. Normaler DC Motor.
Rufus Τ. Firefly schrieb: > Da bei 3.5"-Laufwerken die Drehzahl üblicherweise konstant ist, ist > nicht davon auszugehen, daß damit die Geschwindigkeit geregelt wird. Du meinst mit den Signalen am Shugart 34-Anschluss? Nein, da natürlich nicht. Ich meine die Pinbelegung am Flachbandkabel auf dem Foto. Rufus Τ. Firefly schrieb: > Du müsstest den Motorcontroller dazu bekommen, mit fünf- bzw. > sechsfacher Drehzahl zu arbeiten Oops, meine Frage lautet präziser: Bekomme ich über die 11 Pins (s.o.) den Motorcontroller dazu, mit ca. 1500 .. 1800 U/min und konstanter Drehzahl zu derhen? Der "Kollege" hier schreibt, er hat bis zu 1300 U/min geschafft: http://www.roboternetz.de/community/threads/7310-Schrittmotor-aus-Diskettenlaufwerk?p=65947&viewfull=1#post65947 Rufus Τ. Firefly schrieb: > einfacher dürfte es sein, einen > eigenen BLDC-Controller anzuschließen. Ich suche tatsächlich nach einer schnellen, einfachen und billigen Lösung, da mein aktuelles Problem erstmal die LED-Ansteuerung ist. Am besten, ohne erst neue Bauteile zu bestellen. Wenn die LED-Ansteuerung geht, kann ich immer noch nach einer besseren Lösung für den Antrieb suchen. Morgen ist Sonntag und ich habe nur noch eine Woche Urlaub. Rufus Τ. Firefly schrieb: > Mit dem Motor aus einem CD-/DVD-Laufwerk bist Du vermutlich besser > bedient OK, wenn's nicht klappt, baue ich ein altes CD-Laufwerk auseinander. Danke für den Tipp. So weit bin ich bisher mit meinem kaputten Oszi gekommen: MC = Motor-Control (PIN 16 vom Shugart 34-Anschluss) IND = Indikator für eine Umdrehung SPD = analoges Signal, werändert sich bei Belastung des Motors. CLK = Taktsignal DI, WP, HD und ED: Signale von den Tastern, die die Löcher an der CD abtasten. Mit den richtigen Signalen an SPD und CLK sollte die Drehzahl nach oben gehen. Ich habe noch keine Ahnung, was SPD und CLK bewirken, ich probiere mal weiter, wenn keiner was genaues weiss. VG Torsten
Dieser Floppymotor lässt sich über SPD auf 300 oder 360 upm umschalten. Leichte aber konstante Abweichungen davon bekommst du durch einen anderen Keramikresonator. Deine gewünschten 1500 sind vollkommen unsinnig, dafür reicht im Verhältnis zur Spulenimpedanz die Betriebsspannung nicht. Nimm nirmale Gleichstrommotore oder für 1400 / 2850 Drehstrom-Asynchronmotore.
Torsten C. schrieb: > Rufus Τ. Firefly schrieb: >> Da bei 3.5"-Laufwerken die Drehzahl üblicherweise konstant ist, ist >> nicht davon auszugehen, daß damit die Geschwindigkeit geregelt wird. > > Du meinst mit den Signalen am Shugart 34-Anschluss? Nein. > Ich meine die Pinbelegung am Flachbandkabel auf dem Foto. Ich auch.
MaWin schrieb: > Dieser Floppymotor lässt sich über SPD auf 300 oder 360 upm umschalten. Und was passiert, wenn ich den Takt (CLK-Signal) um den Faktor 2 oder 5 erhöhe?
Hmmm ... Torsten C. schrieb: > SPD = analoges Signal, verändert sich bei Belastung des Motors. MaWin schrieb: > Dieser Floppymotor lässt sich über SPD auf 300 oder 360 upm umschalten. MaWin, bist Du Sicher, dass SPD ein Eingang für den Floppymotor ist? Das sieht mir mehr nach einem Ausgang aus. Torsten C. schrieb: > Und was passiert, wenn ich den Takt (CLK-Signal) um den Faktor 2 oder 5 > erhöhe? Hmmm, das weiss keiner? Dann muss ich die Antwort wohl selber finden. Das CLK-Signal hat genau 1MHz bei 300 U/min. Einen Frequenzgenerator habe ich nicht, aber ein MSP430 LaunchPad. Aus den Datenblättern: The four RSELx bits select one of sixteen nominal frequency ranges for the DCO: RSELx = Bits 3-0 of BCSCTL1, RSELx = 0 ..15 The three DCOx bits divide the DCO range selected by the RSELx bits into 8 frequency steps, separated by approximately 10%: DCOx = Bits 7-5 of DCOCTL, DCOx = 0 .. 7 The five MODx bits, switch between the frequency selected by the DCOx bits and the next higher frequency set by DCOx+1: MODx = Bits 4-0 of DCOCTL: MODx = 0 .. 15 The mixing formula: t = (32 – MODx) × tDCO + MODx × tDCO+1 SRSEL (Frequency step between range RSEL and RSEL+1): 1,35 SDCO (Frequency step between tap DCO and DCO+1): 1,08 Hmmm, damit 'ne Frequenz ausrechnen ist wohl Quatsch, da die Angaben für die "DCO Frequency" selbst im Datenblatt "slas735i" den o.g. Angaben nicht ganz entsprechen. Also die Einfache Methode: RSELx von 6 .. 12 auswählen und immer mit DCOx = 3 und MODx = 0 arbeiten, also: RSELx = 6 => 0,80 MHz RSELx = 7 => 1,15 MHz RSELx = 8 => 1,60 MHz RSELx = 9 => 2,30 MHz RSELx = 10 => 3,40 MHz RSELx = 11 => 4,25 MHz RSELx = 12 => 5,80 MHz Die tatsächlich ausgegebene Taktfrequenz kann ich mit meinem (kaputten) Oszi abschätzen und die Drehzahl an dem IND-Signal. Das IND-Signal kommt aktuell übrigens tatsächlich alle 20ms, was 300U/min entspricht. Umschalten will ich RSELx durch einen Dreh-Drückgeber. Ich schreibe wohl morgen mal ein Programm dazu. Ich hoffe, dass ich bei RSELx = 12 auf knapp 1700 U/min komme. Mal sehen ...
> Das CLK-Signal hat genau 1MHz bei 300 U/min. Das wird abgeleitet vom Keramikresonator/Quartz auf der anderen Platine. > Und was passiert, wenn ich den Takt (CLK-Signal) um den Faktor 2 oder 5 > erhöhe? Bei 2 läuft er doppelt so schnell mit geringerem Drehmoment. Bei 5 läuft er wohl gar nicht mehr, wie geschrieben reicht die Betriebsspannung nicht, und die Spulen willst du sicher nicht umwickeln.
Rufus Τ. Firefly schrieb: > Da bei 3.5"-Laufwerken die Drehzahl üblicherweise konstant ist, ist > nicht davon auszugehen, daß damit die Geschwindigkeit geregelt wird. Wenn dem so wäre, könnte ich über CLK die Geschwindigkeit nicht ändern. MaWin schrieb: > Bei 2 läuft er doppelt so schnell mit geringerem Drehmoment. Das klingt logisch. MaWin schrieb: > Bei 5 läuft er wohl gar nicht mehr Hmmm, ich habe die Wahl: CD-ROM-Laufwerk zerlegen oder schauen, ob's bei 5 noch geht. Viel Drehmoment brauche ich ja nicht, ich habe ja nur den "Luftwiderstand". Wahrscheilich sollte ich wirklich besser ein CD-ROM-Laufwerk zerlegen. Aber wie wird denn das nun wieder angesteuert? Ich schaue morgen mal. ... Erstmal Danke und Gute N8.
In einem CD-Rom Lw ist fürs drehen von der CD (zum. bei den alten) einfach ein normaler DC-Motor drinne. Das Laufwerk leitet beim hochfahren aus der inneren "initialisations" spur die passende drehzahl ab und nutzt dann später die Pegelwechsel von den Bits zur Regelung. Der Motor kriegt einfach per PWM mehr oder weniger Saft. Wenn du den regeln willst musst du eine Reflexlichtschranke montieren und dann PWMen ... Eine Alternative wäre auch noch ein kleiner Brushless aus dem Modellbau, bei deinen Ansprüchen solltest du den einfach mit fester Phasenlage wie einen drehstrommotor anteuern können (evtl. Rampe beim hochfahren)...
Torsten C. schrieb: > Das IND-Signal kommt aktuell übrigens tatsächlich alle 20ms, was > 300U/min entspricht. Sorry, natürlich alle 200ms Max D. schrieb: > Wenn du den regeln > willst musst du eine Reflexlichtschranke montieren und dann PWMen ... Danke für den Hinweis. Also zerlege ich das CD-ROM-Laufwerk wohl besser nicht! Das klingt nämlich nicht nach "einer schnellen, einfachen und billigen Lösung"^^. Also wohl eher doch ebay 130942066508 mit Wartezeit bis nach dem Urlaub. Ich dachte, ich komme drum rum. Oder ich fahre Montag zu Conrad und kaufe einen teureren Brushless aus dem Modellbau. Morgen (bzw. heute) haben die Geschäfte eh zu. Ich denke, ich probier mal 5 MHZ, bevor ich aufgebe. Vielleicht ist das gute "TEAC"-Laufwerk ja over-engineered. ;-) Torsten C. schrieb: > Das sieht mir mehr nach einem Ausgang aus. PS: Dort liegen übrigens ca. 14 mV an, die sinken, wenn man den Motor bremst und fallen auf auf 2,2mV, wenn man ihn anhält.
Also das regeln ist wenn man sich den code für die regelschleife klaut sehr schnell gemacht. Du hängst an deinen System-timer (brauchstu eh wenn du irgendwas auf die drehung syncen willst) einfach nen software-zähler hin, der zählt wie oft der sys-timer tickt bis der motor einmal rum ist (einfach reflex-lichtschranke für 2€ und achse an einer stelle schwarz mit weißem Strich anmalen) und regelst das dann mit deiner schleife auf deine gewünschte Zahl. Sinnvollerweise die Zahl "Zeilen" die dein POV-Disp haben soll. Wenn es genauer und damit schöner sein soll zählst du hald mit 3 oder 4 facher Auflösung deines Disps, dann verlierst du am Rand keine Zeile...
Mir ist grade etwas klar geworden: Du brauchst nicht die Drehzahl zu regeln, du musst einmalig eine Spannung finden bei der der Motor angemessen (in der mitte des bereiches) dreht. Diese lässt du einfach angelegt. Dann nimmst du die Lichschranke zur Bestimmung der Drehzahl (bzw. der Zeit die der Motor für eine Umdrehung braucht) und nimmst die dann als Basis für deine Zeilenerzeugung. Es ist sinnvoll die Auflösung für die Zeit etwa drei bis vier mal so hoch zu wählen wie deine pixeldichte sein soll, sonst sind die Bereiche um die Synchronisationsstelle zittrig. Alles was die Sw dann tun muss ist folgendes: Motor an und warten bis die drehzahl oben ist (die pulszeiten zwischen den hell/dunkel wechseln der ls sind klein genug) Dann eine Umdrehung von der Dauer messen (Zahl der systemcounts zwischen zwei fallenden Flanken (wenn man die LS gegen GND mit pullup im AVR klemmt sind die fallenden Pulse schärfer) abzählen) die Zeit/counts durch die Zahl der gewünschten Zeilen teilen (hier lohnt sich jetzt der einheitlichkeit der Streifen wegen eine hohe radiale Auflösung, wenn diese sehr hoch ist kann man sogar einfache integer teilen, der Versatz ist dann klein genug, ansonsten muss man hald iwie mit leicht verschieden Zeilen kompensieren) Dann bei der nächsten flanke loslegen mit dem INhalt der ersten Zeile (wird wohl iwas richtung propelelr-clock werden) und nach x (x ist das ergebniss der teilung von vorher) ticks die zweite Zeile raushauen usw bis entweder die nächste flanke kommt (man also nicht fertig geworden ist -> nächstesmal schneller sein) oder man fertig ist und noch keine flanke da war (man war zu schnell -> nächstesmal langgsamer ausgeben). Wenn man sich an dem minimalen JItter durch diese binäre Reglung stört dann kann man noch irgendwie auf den passenden Takt synchronisieren, also wenn alles stabil läuft regelt man nichtmehr weiter sonder erst wieder wenn alles um mehr als ein paar Prozent daneben liegt (eine Lücke von ein paar grad sieht der nutzer bei den 25 Hz eh nicht richtig). PS: Ich würde mir mehr Sorgen darum machen wie man den Saft an das Disp kriegt ^^
MaWin schrieb: > Deine gewünschten 1500 sind vollkommen unsinnig … > Bei 2 läuft er doppelt so schnell mit geringerem Drehmoment. > Bei 5 läuft er wohl gar nicht mehr, Es war ja am Sonntag schnell probiert und es stimmte: Bei rund 700 U/min war Schluss. Keine Chance! MaWin schrieb: > Nimm normale Gleichstrommotore vn nn schrieb: > Normaler DC Motor. Ihr habt Recht, das ist wohl für diese Anwendung noch einfacher und preiswerter als mit einem Brushless. 1. Nur "Umdrehungszeit" messen und PWM-Rate anpassen. 2. Nur eine einkanalige "Endstufe" 3. Preisgünstiger Motor. Ich hatte schon damit angefangen, aber all meine Ideen für die Datenübertragung gefallen mir noch nicht. Ich denke, ich werde nun aus einem alten VHS-Recorder die Kopftrommel ausbauen, denn da sollte auch gleich ein Rotationstransformator drin sein. Also Datenübertragung und Motor in einem! Danke für Eure Hinweise! Max D. schrieb: > Ich würde mir mehr Sorgen darum machen wie man den Saft an das Disp > kriegt. Ich dachte an Kohlebürsten von Märklin (Bürstenpaar 89871) und zwei Ring-Leiterbahnen auf der Gegenseite. Aber nun schaue ich mir erstmal die Kopftrommel genauer an, vielleicht kann die ja sogar "den Saft" übertragen. Profi schrieb im Beitrag "Leistungs- und Datenübertragung für Propellerclock": > ich verwende als Motor eine > Videorekorder-Kopftrommel. Funzt wunderbar. Darin ist doch bereits ein > Transformator zur Übertragung des Videosignals enthalten. Ob man den > zur Energieübertragung verwenden kann? Bei Record wird ja auch etwas > Leistung übertragen.
Die Leistung von dem Videokopf wird nicht reichen wenn dein disp nicht winzig wird. Kohlebürsten gehen, sind aber hald Verschleißteile. Ich würde mich mal in Richtung Royer-Converter umschauen (gibt hier im wiki sogar einen artikel dazu). Das ist mit zwei Spulen und hat gut Leistung wenn man das entsprechend dimensioniert. Hat den Vorteil, dass du auch gleich über modulation deine daten übertragen kannst. Ist hald aufwendiger... Wenn du doch bei Kohlebürsten bleibst, dann kannst du die auch gleich zur synchronisation zweckentfremden. Dazu machst du in eine der Bahnen einen kleinen Abschnitt der an einem (evtl. zusätzlich geschützen) Eingang von deinem µC hängt und den bei jeder Umdrehung kurz hoch/runter zieht, damit sparst du dir die lichtschranke... (und aussetzer in der größenordnung müssen sowieso elko-gepuffert werden). Nebengedanke: Je nach design kann man auch das gehäuse+achse vom motor für einen Pol benutzen, dann hat man nurnoch eine bürste ...
Max D. schrieb: > Die Leistung von dem Videokopf wird nicht reichen wenn dein disp nicht > winzig wird. Dann spare ich mir wohl besser die eigene Analyse. Danke. Die im Artikel Royer Converter angegebenen technischen Daten gefallen mir schon mal. Mal sehen, ob man das auch mit 4..5A schafft. Immerhin gibt's Leute, die Elektroautos induktiv aufladen wollen: http://www.mein-elektroauto.com/2011/11/die-vorteile-beim-aufladen-des-elektroauto-per-induktion/4018/ Das sind sicher noch ein paar mehr Ampere. Danke für den Tipp! :-) Max D. schrieb: > gehäuse+achse vom motor für einen Pol benutzen Da bin ich skeptisch. 5A über ein Kugellager??? Max D. schrieb: > Hat den Vorteil, dass du auch > gleich über modulation deine daten übertragen kannst. Ich denke, das ist das, womit ich mich wohl am besten als nächstes beschaäftige: Royer-Converter + aktiver Gleichrichter + Powerline-Modem. Leider ist IRDA etwas zu langsam. Ich hab' noch keine gute Idee und muss noch weiter recherchieren.
Mein grober Gedanke war: IrDA nehmen, um sich weitere Modulationen (Modem) zu ersparen. Rufus Τ. Firefly schrieb: > 4 MBit reichen nicht? Äääh. Doch, könnte reichen. So viel? Ich hatte mich bisher nur an dem MSP430 USCI_A0 orientiert, der kann m.E. nur "Serial Infrared", wenn ich richtig gelesen habe. Danke für den Denkanstoss, Rufus. Mit 'nem anderen Controller geht vielleicht auch FIR oder noch mehr. Ich hab' gerade gelesen, dass es sogar "Giga-IR" gibt. Ich schau mal, was man dafür benötigt und ob das für 'ne Überlagerung (Power-Line-Modem) reicht.
Torsten C. schrieb: > Rufus Τ. Firefly schrieb: >> 4 MBit reichen nicht? > > Äääh. Doch, könnte reichen. So viel? Mittlerweile wohl sogar noch deutlich mehr. http://en.wikipedia.org/wiki/IrDA#IrPHY Ich bezog mich da auf "FIR", das Mitte der 90er verfügbar war (hatte mal einen Drucker und ein Notebook, die das konnten).
Torsten C. schrieb: > Da bin ich skeptisch. 5A über ein Kugellager??? Wenn man den Weg über schleifende Kontakte geht dann bemüht man sich den strom niedrig zu halten. Wenn du statt deiner 5 V (ich denk mal damit hast du gerechnet) jetzt sagen wir mal 50 V nimmst (is bei DC noch "Schutzkleinspannung") dann brauchst du nurnoch 500 mA (zzgl. Verluste vom Schaltregler vlt. so 600 mA insg.) und stepst die hald dann mit nem Schaltregler wieder runter. Bei 5 A werden sich auch deine Bürsten nicht grade freuen ^^ Stepdowns für 5 A gibts inzwischen schon mit sehr kleinen bauformen (dank sei der hohen Schaltfrequenz ^^) Und wegen der gewichtsverteilung nimm zur not zwei regler mit je 2-3 A und mach die gespiegelt auf deinem rotor fest.
Max D. schrieb: > Bei 5 A werden sich auch deine Bürsten nicht > grade freuen ^^ Stimmt. 50V und Stepdown ist - so oder so - wohl angesagt, hatte ich noch gar nicht dran gedacht, selbst als ich letzte Woche das winzige "Märklin Bürstenpaar" ^^ das erste mal in den Händen hielt. Trotzdem ist mir Strom über ein Kugellager nicht geheuer. Bei einem Schleifkontakt an der Welle hätte ich nicht solche Bauchschmerzen. Aber wenn das mit dem Royer Converter klappt, ist mir das sogar lieber als mit irgentwelchen Bürsten. Ich werde mich in den nächsten Tagen mal damit beschäftigen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.