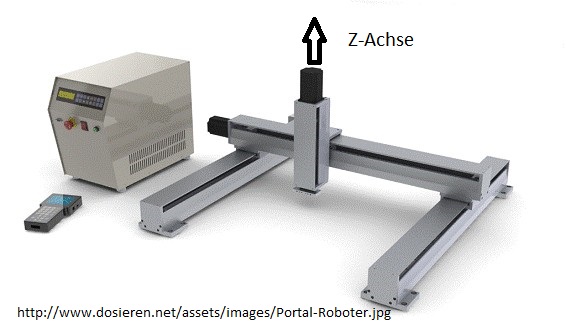
Hallo zusammen, ich möchte ein Projekt mit 3 Linearachsen umsetzen und da ich keine Erfahrung in der Auslegung von Achsen und Motoren habe, möchte ich das allwissende Forum um Rat fragen. Der prinzipielle Aufbau des Systems entspricht dem eines Portalroboters wie in dem angehängten Bild zu sehen ist. Der einzige Unterschied ist, dass die Z-Achse "nach oben" und nicht "nach unten" ausfahren soll (siehe Bild). Die zu handhabende Masse am Ende der Z-Achse beträgt etwa 1Kg und auf der gesamten Länge der Z-Achse "hängen" zusätzliche 2Kg Masse. In X-/Y- und Z-Richtung betragen die nötigen Verfahrwege etwa 50-70cm. Ein weiterer wichtiger Punkt ist, dass die X-Y-Ebene vertikal (z.B. an einer Wand) angebracht werden soll. Das System soll prinzipiell auch draußen zum Einsatz kommen und deswegen sind Schmutz und Regenbeständigkeit auch zu berücksichtigende Punkte. Die nötige Positionspräzision der X-Y-Achsen liegt bei +-0,5mm. Die Anforderungen, die die Anwendung die ich vor Augen habe an das Portalsystem stellt, sind deutlich niedriger als die typischer Einsatzszenarien solcher Systeme. Ein typischer Durchlauf sieht etwa wie folgt aus: 1. Anzufahrende X-Y-Koordinaten werden gemessen 2. Die beiden X-Y-Achsen fahren die Koordinaten in etwa 5-10 Sekunden an und legen dabei bis zu 50-70cm zurück 3. Dann fährt die Z-Achse gemächlich aus und darf auch etwa 5-10 Sekunden für 50-70cm benötigen um die Endposition zu erreichen 4. Die Achsen sollen über Minuten/Stunden die Endposition halten 5. Rückfahrt in die Ausgangsposition mit denselben Geschwindigkeiten wie auf der Hinfahrt Daraus ergeben sich für mich verschiedene Fragen. Bzgl. der Achsen: Ich habe bei meinen Recherchen sehr viele unterschiedliche Bauweisen von Linearachsen gefunden die aber häufig beworben wurden für "maximale Geschwindigkeiten und Beschleunigungen". Sowas brauche ich aber nicht, da die Geschwindigkeiten und Beschleunigungen ziemlich gering sind. Wichtig ist, dass sie sich vertikal an der Wand installieren lassen ohne sich beim Ausfahren der 3Kg+Achsengewicht schweren Z-Achse zu verziehen. Ich hoffe auf Grundlage meiner Angaben kann man schon eine Empfehlung für einen Linearachsentyp angeben (bzw. zwei Linearachstypen, da die Z-Achse ja vermutlich einen anderen Aufbau haben wird als die anderen beiden). Auch bin ich sehr an einem Shop/Hersteller interessiert der möglichst günstige Achsen anbietet die die Anforderungen erfüllen. Bzgl. der Motoren: Hier besteht laut meinen Recherchen erstmal grundlegend die Entscheidung zwischen Schritt- und Servomotoren. Außerdem frage ich mich, ob es Bremsen für solche Motoren gibt. Da die X-Y-Achsen die Z-Achse unter Umständen für Stunden in der Endposition halten müssen, wäre es nicht sehr energiesparend wenn die Motoren die gesamte Zeit unter Strom stehen müssten. Eine Feststellbremse stelle ich mir ganz nützlich vor, weiß allerdings nicht ob es sowas gibt. Für Schrittmotoren wird ja auch ein Haltemoment angegeben, allerdings weiß ich nicht ob das zuverlässig solche Lasten halten kann. Eine weitere Frage bezieht sich auf den Schlitten bestehend aus 2 Linearführungen (siehe Bild) auf dem die Y- und die Z-Achse laufen: Müssen beide Achsen jeweils mit einem Motor bestückt werden, oder kann man evtl. insgesamt nur einen verwenden. Sooo...ich glaube das reicht jetzt erstmal an Fragen. Ich würde mich sehr freuen wenn mir wer weiterhelfen könnte. Viele Grüße und besten Dank!
Angehängte Dateien:
-

Portal-Roboter.jpg
44 KB
Hallo! Natürlich gibt es Motoren mit integrierten Haltebremsen. Bei (teuren) EC-Servos für Betrieb an mehreren hundert Volt ist das eine gängige Option. Bei Niederspannungsservos (BLDC) und Schrittmotoren gibt es das auch, aber eher selten. Da du offensichlich keine hohen Geschwindigkeiten benötigst kann man versuchen, dass auf die Selbsthemmung der Achsen zu setzen. Das bedeutet niedrige Spindelsteigungen, auf keinen Fall Zahnriemen. Ggf. wären sogar Trapezgewindespindeln eine Option, obwohl ich davon sonst eher abrate. Oder eine zusätzliche Untersetzungsstufe (Antrieb der Spindel über Zahnriemen). Das Haltemoment eines Schrittmotors steht bei Nennstrom an. Wenn längere Zeit eine Position gehalten werden muss, reduziert man üblicherweise den Haltestrom. Bei 50% des Stroms stehen dann nur noch ~50% des Haltemoments zur Verfügung, es fällt aber auch nur 25% der Verlustleistungs an. Bei unbestromtem Motor steht nur noch das Rastmoment zur Verfügung (Größenordnung einige Prozent des Haltemoments). Ob das speziell bei der Z-Achse ausreicht, um ein Absinken der Achse zu verhindern hängt von der Last und dem Aufbau der Achse ab. Mit freundlichen Grüßen Thorsten Ostermann
Vielen Dank schonmal für die Informationen! Dass das Haltemoment nur bei Nennstrom ansteht habe ich bisher immer überlesen. Ich informiere mich jetzt erstmal bezüglich der empfohlenen Bauteile. Ich würde mich über weiteren Input freuen! Grüße
ganz entscheidend ist auch die Budgetfrage. Wenn das auch was Kosten darf, fällt auch die Auswahl entsprechender professioneller Lieferanten leichter. Oder soll es eine Bastellösung werden?
Dein Hauptproblem werden die benötigten 0.5mm maximales "Durchhängen" der bis 3kg schweren Z-Achse sein die auf 50cm ausfährt und damit Kraft auf dem einen winzigen Lager der Y-Achse ausübt. Statt zwei weit entfernten Lagern bekommst du ein Kippmoment von knapp 20Nm. Und dabei darf sich der Winkel nicht mal um 0.5 Grad verändern. Die Konstruktion ist also maximal blöd. Wenn man das Durchhängen wegkalibriert und nur noch die Unterschiede im Durchhängen zählen (an den beiden Seiten wird es weniger sein als in der Mitte) wird das Problem zwar entschärft, aber draussen könnte Wind herrschen der wieder alles zunichte mach. Bau einfach mal so ein 70 x 70 x 50 cm Gestell und Lege am Ende ein Gewicht von 2kg drauf. Wie dick meinst du muss die Konstruktion sein, damit es nicht mal 0.5mm durchbiegt ? Deine Linearachsen sind also noch das kleinste Problem, auf Kippmomente sind die meisten aber nicht ausgelegt.
Metheus schrieb: > Hallo zusammen, > > ich möchte ein Projekt mit 3 Linearachsen umsetzen und da ich keine > Erfahrung in der Auslegung von Achsen und Motoren habe, möchte ich das > allwissende Forum um Rat fragen Großer Fehler. Hier gibt es leider nur Leute die GLAUBEN alles zu wissen. Wie Mawin. Seine Elektronikkentnisse in allen Ehren, von Mechanik hat er keine Ahnung. Such Dir ein CNC-Fräsen-Forum. Da gibt es Leute vom Fach UND mit Erfahrung, die können die wirklich weiter helfen.
> Da gibt es Leute vom Fach
Du meinst so rotzige wie dich, die aus geistiger Beschränktheit zwar
nichts zum Problem beitragen können, aber ein grosses Maul haben.
Auf die kann er wohl verzichten. Aber er wird dort auf dasselbe Problem
hingewiesen werden.
Das mit dem Kippmoment habe ich mich auch schon gefragt. Da ich die Lage der anzufahrenden Stelle allerdings kontinuierlich messen kann, könnte ich solche Fehler ausregeln. Weiß jemand zufällig welche Achskonstruktion die Kippmomente am besten wegsteckt? Zum Thema Budget: Eine Bastellösung soll es nicht zwangsläufig werden und Budget ist auch vorhanden. Zu teuer darf es allerdings auch nicht sein. Ich würde prinzipiell professionelle Achsen kaufen wollen, allerdings nicht die überdimensionierten Dinger die für ganz andere Einsatzzwecke ausgelegt sind. 3-4k€ dürfte das schon kosten wenn es gute Begründungen gibt das es nicht billiger geht. Schonmal vielen Dank an alle!
Das Kippmoment sollte sich eigentlich schon mit halbwegs vernünftigen Aluminiumprofilen für den Prototypenbau in den Griff kriegen lassen. Da die Konstruktion ja immer gleich aufgehängt wird, kannst Du auch recht einfach die entsprechenden belasteten Profile auswählen, also einen möglichst großen Querschnitt in der Belastungsrichtung wählen. Solche Profile finden sich z.B. hier: www.smt-montagetechnik.de Als Führungen selbst würde ich Schienen und Schlitten mit Kugelumlaufführungen wählen. Diese lassen sich auf den Standardprofilen einfach verschrauben und sind mittlerweile wirklich preiswert erhältlich. Als Antriebe reichen mMn Schrittmotren, da es ja nicht sehr dynamisch sein muss. Dafür wird es aber viel einfacher und preiswerter als mit Servos. Wie Thorsten schon schrieb, kann man die Motoren bei Stillstand deutlich niedriger bestromen. Das machen viele Endstufen schon von sich aus vollautomatisch. Und/oder man nimmt hier tatsächlich Trapezgewinde. Als Wetter-/Regenschutz würde ich mir eine passende Haube z.B. aus Plexiglas kleben (das geht sehr sauber) und diese dann zusammen mit dem Gestell aufschrauben. Eventuell noch so etwas wie Gummilippen oben und seitlich, um halbwegs Abdichtung zu haben. Wenn man dann das ganze gestell noch etwas von der Wand abhebt, sollte da nichts drankommen. Unten kannst Du das Gehäuse ja offen lassen, um immer Zugriff zu haben.
a) Ich würde ich erst mal fragen, wohin denn die Z-Achse verschwindet, wenn sie eingefahren wird. In die Wand ? b) Dann würde ich fragen, ob es unbedingt so schmale Profile sein müssen, könnte man nicht 30cm lange Schlitten auf 1m langen X-Achsen und Y-Achsen verschieben, das entschärft die Kippbelastung schon mal. c) Dann gäbe es komplett andere Konstruktionen, die viel einfacher sind, um einen Punkt im Raum anzusteuern wenn die Spitze nicht waagerecht sein muss, beispielsweise 3 an verschiedenen Punkten an der Wand montierte und an der Spitze zusammengefasste in der Länge veränderbare Spindeln (deren eingefahrenes Ende dann IN die Wand ragt, siehe Problem a) oder ein "Roboterarm" der nur Drehgelenke hat.
Die Anforderungen an die Genauigkeit sind also gering und es sind keine großen Beschleunigungen und Geschwindigkeiten nötig. Außerdem ist ein realistisches Budget vorhanden (und du machst die Gedanken über all diese Dinge). Das ist schonmal gut. Einzig eine auf 50-70cm ausfahrende z-Achse mit 1kg Masse daran bei vertikaler Aufhängung würde mir Sorgen machen. Die wiegt ja auch selbst schon einiges. Und MaWins Anmerkungen, ob die z-Achse eingefahren in der Wand verschwindet, und die Frage nach alternativen Konzepten sind auch wichtig... Wenn du bei dem kartesischen Konzept bleibst, würde ich auch auf Trapezgewindespindeln setzen. Guck mal bei Igus. Da gibt es einige unterschiedliche Linearachsen die zu deinen Anforderungen passen. Außerdem gibt es auf der Website Berechnungstools zur Auslegung. Montieren würde ich das auf Alu-Profilen. Als Antrieb reichen Schrittmotoren. Ich würde welche ohne Bremse nehmen und das eingesparte Geld für ein paar hundert mA Haltestrom ausgeben ;-). Falls das überhaupt nötig ist.
nochetwas: Ein Vorteil der Igus-Führungen ist, dass es sie in korrosionsbeständig gibt. Die kann man dann sogar unter Wasser betreiben. Sie sind viel ungenauer als Kugelumlaufführungen, aber billiger, und die Genauigkeit benötigst du ja sowieso nicht.
Sorry, sehe gerade, dass der Thread eine Leiche ist, und von einem Troll ausgegraben wurde...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.