Guten morgen, ich habe zwei digitale Schaltungen: Meine Steuerung sowie einen Motorcontroller einer externen Firma (110A bei 24V, da möchte ich nicht ran). Meine Steuerung hat bisher immer Proportionalventile angesteuert, daher PWM mit ca 500Hz. Nun soll diese Steuerung den Motorcontroller ansteuern, welcher einen Eingang zum Anschluss eines Potis hat (0-5V, 5K Poti). Diese soll nun unser Steuersignal bekommen. Wenn ich da meine 500Hz reinschicke, wird das ja sehr wahrscheinlich Abtastfehler geben, also will ich das glätten. Aber wie mache ich sowas am besten? Belastung ist hierbei unkritisch, aber die Einschwingzeit meines RC-Gliedes passt mir so nicht (erste Berechnung waren irgendwas um 300ms und der Motor sollte schon so schnell wie möglich stoppen...). Was also macht man da am besten? (Gerne auch Stichworte oder Links zum weiter Totgooglen ;) ). Gruss, Olli
Wenns schnell sein muß, ein MC, der das Tastverhältnis mißt und auf einen DAC ausgibt. Damit erreichst Du bei 500Hz PWM 2ms Reaktionszeit.
@ Oliver W. (oliver_w49) >Nun soll diese Steuerung den Motorcontroller ansteuern, welcher einen >Eingang zum Anschluss eines Potis hat (0-5V, 5K Poti). Intern ist das wieder eine Spannung. >Diese soll nun unser Steuersignal bekommen. Wenn ich da meine 500Hz >reinschicke, wird das ja sehr wahrscheinlich Abtastfehler geben, also >will ich das glätten. >Aber wie mache ich sowas am besten? Mit einem RC-Filter. Ggf. mit mehreren Stufen. >Belastung ist hierbei unkritisch, aber die Einschwingzeit meines >RC-Gliedes passt mir so nicht (erste Berechnung waren irgendwas um 300ms >und der Motor sollte schon so schnell wie möglich stoppen...). >Was also macht man da am besten? (Gerne auch Stichworte oder Links zum >weiter Totgooglen ;) ). http://www.mikrocontroller.net/articles/Pulsweitenmodulation#DA-Wandlung_mit_PWM
Peter Dannegger schrieb: > Damit erreichst Du bei 500Hz PWM 2ms Reaktionszeit. So schnell muss es nicht sein, der Roboter bewegt sich im Bereich bis 15kmh, ich will nur nicht das es beim zB "Einparken" (niedrige Geschwindigkeit, "Präzision" gefordert) jedes mal eine Bedenksekunde braucht. Falk Brunner schrieb: > Intern ist das wieder eine Spannung. War mir bewusst. > Mit einem RC-Filter. Ggf. mit mehreren Stufen. Da ist aber für mich die Frage: Wo kann man da was lesen um mal die "Reaktionszeit" von einem Mehrstufigen zu beurteilen? > http://www.mikrocontroller.net/articles/Pulsweiten... Im vorraus gelesen und anhand dessen einen Filter Designed, aber der ist halt nicht optimopti ;)
Angehängte Dateien:
-

Filter_Schaltung.png
11 KB -

Filter_Transient.png
7,1 KB -

Filter_Ripple1.png
13 KB -

Filter_Ripple2.png
17 KB
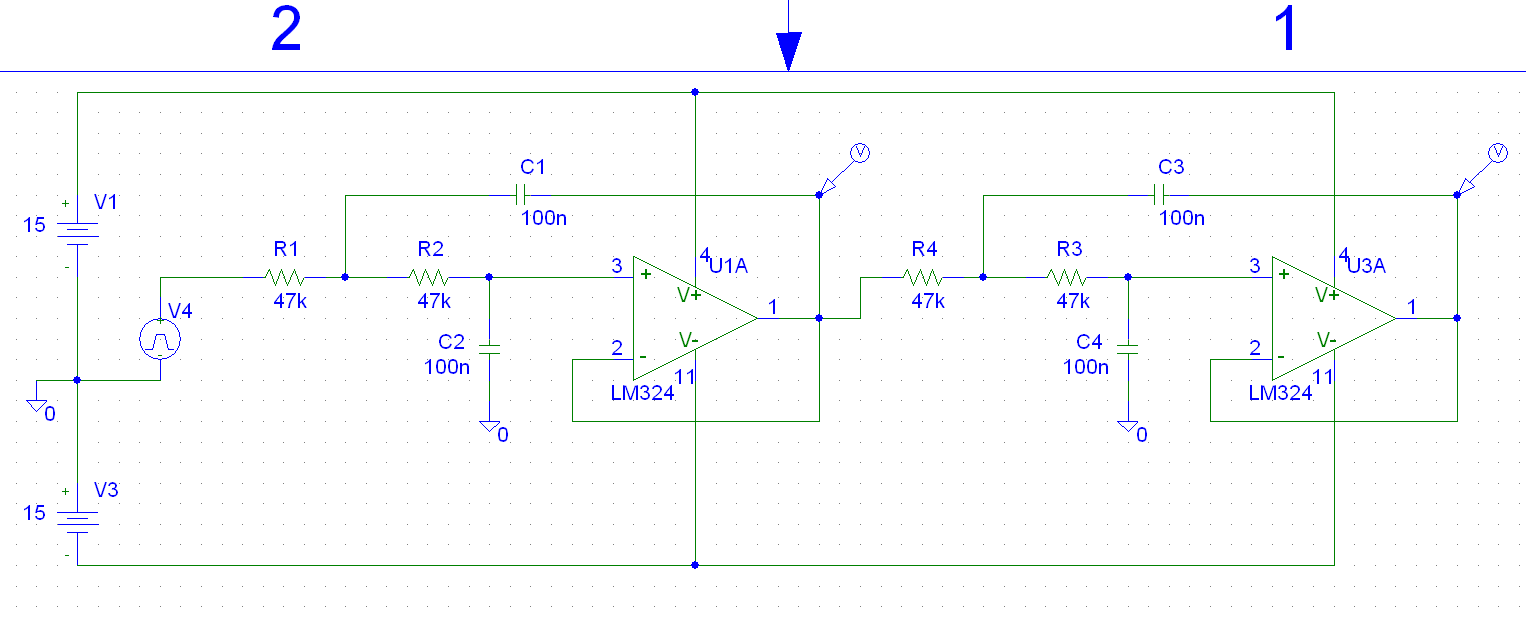
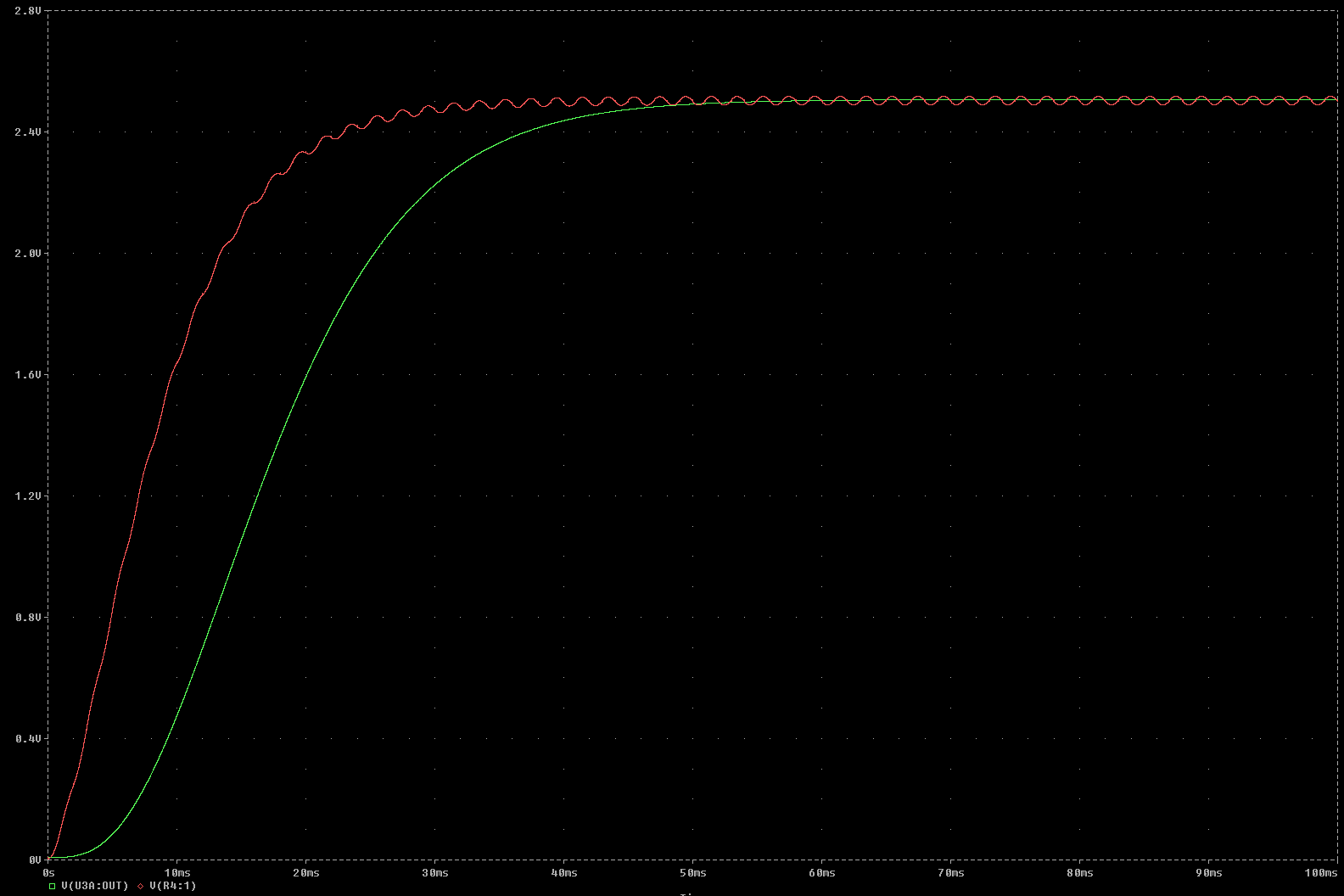
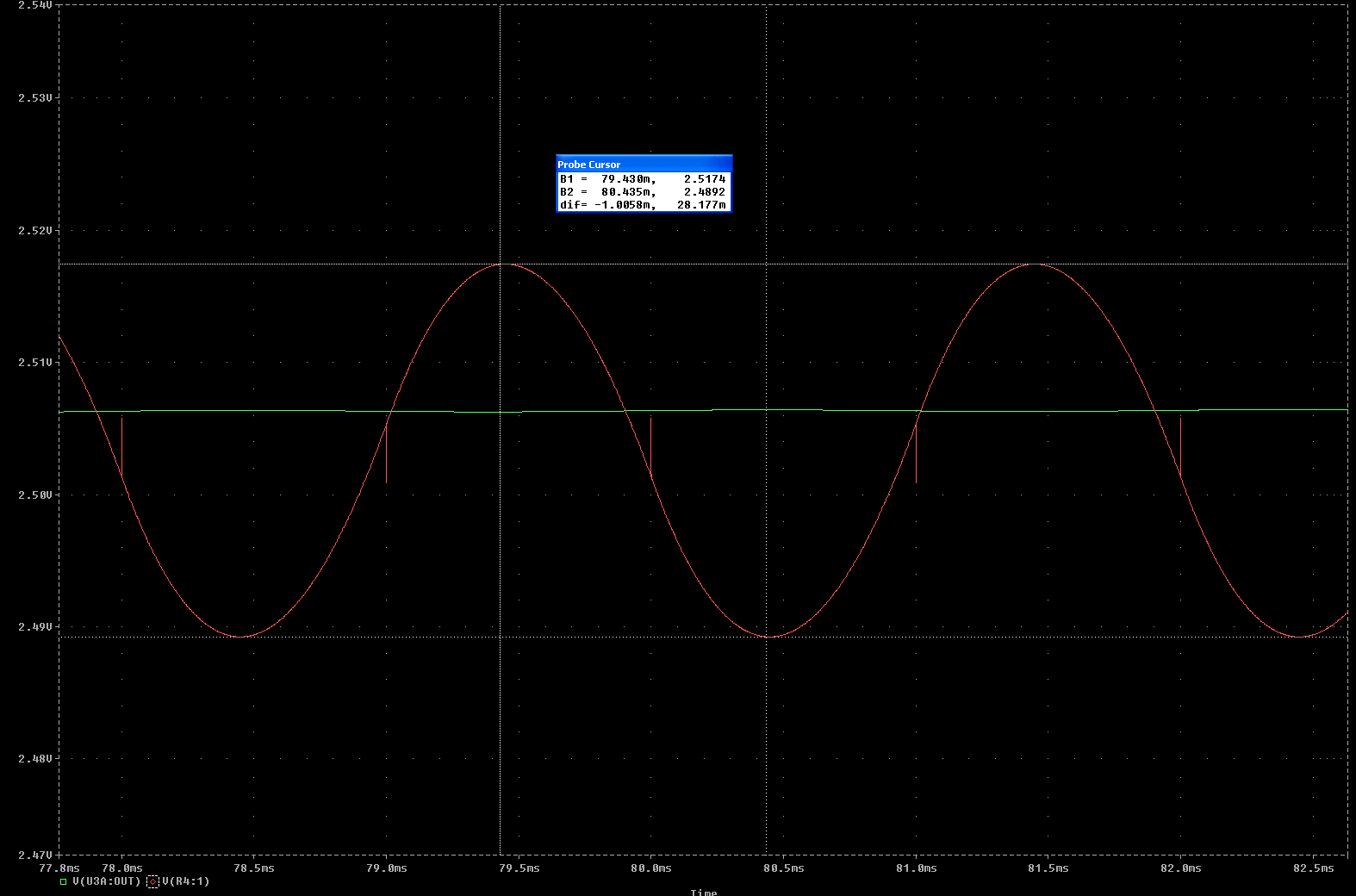
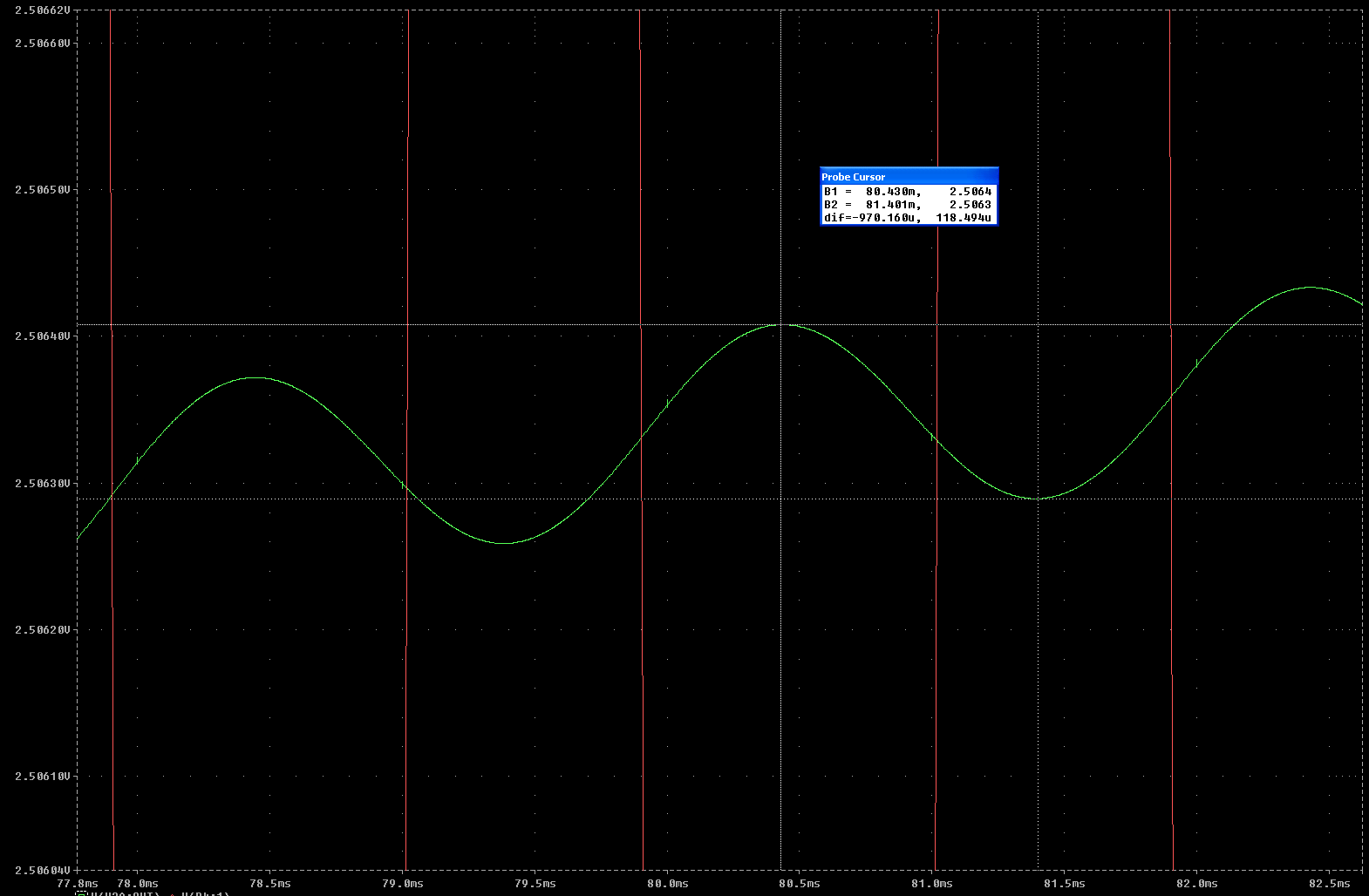
@ Oliver W. (oliver_w49) >> http://www.mikrocontroller.net/articles/Pulsweiten... >Im vorraus gelesen und anhand dessen einen Filter Designed, aber der ist >halt nicht optimopti ;) Na dann rechne doch mal. Welche Anstiegszeit soll dein Filter haben? 10ms? 100ms? Sagen wir 10ms. Daraus errechnet man die Bandbreite bzw. Zeitkonstante. Anstiegszeit ~ 2,2 tau = R*C -> tau = 4,5ms Die Grenzfrequnzen liegt bei 1/(2*Pi*tau) = 35 Hz. Ein Filter 1. Ordnung hat 20dB/Dekade Dämpfung, d.h. 350Hz werden schon mit ~20dB = Faktor 10 gedämpft. Naja. Da das aber nicht ausreicht, muss man einen Filter höherer Ordnung nehmen. Im einfachsten Fall den Filter 2 oder 3x in Reihe schalten, wenn gleich das Ergebnis nicht optimal ist. Oder richtig per Filterdesignregeln, gibt es auch online. http://sim.okawa-denshi.jp/en/OPseikiLowkeisan.htm Aktiver Filter 2. Ordnung mit 35 Hz in Sallen Key Struktur. R1=R2=47k C1=C2=100n Wenn 2. Ordnung nicht reicht, schaltet man davon zwei in Reihe, schon hat man 4. Ordnung. Das Ergebnis, siehe Anhang, Einschwingvorgang und Ripple. Bei dem Filter 2. Ordnung hat man ca. 28mV Ripple, bei 4. Ordnung ca. 118uV.
> Wo kann man da was lesen um mal die "Reaktionszeit" von einem > Mehrstufigen zu beurteilen? http://www.lothar-miller.de/s9y/archives/11-RC-Glied-fuer-PWM.html#extended http://www.microchip.com/ AN538 "Using PWM to Generate Analog Output"
Okay, ich hab mich in das Ganze ein wenig eingelesen. Wenn ich meine PWM Frequenz auf ca. 4kHz erhöhe und dann einen "normalen" Tiefpass von R=47k und C=100n einsetze, habe ich knapp 10ms bis ich auf 90% bin, voll vertretbar. Nun will ich ein wenig Sicherheit gewinnen bezüglich der Last, also einen OPV dazwischen. Will ich nun einen nichtinvertierenden Verstärker als "Spannungsfolger" bauen, so sollte ja R1/R2 -> 0 gehen, damit V -> 1 geht. Kann ich da R1 weglassen oder sollte ich da eher 100 Ohm / 200kOhm nehmen?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.