Hallo, ich will in Eagle eine Motorsteuerung realisieren. Dafür möchte ich einen L6203 bzw. L293D als Treiber verwenden. Das ganze möchte ich via I2C programmieren mit Hilfe eines Evaluationsboards: LPC1769. Leider bin ich mir im Moment unschlüssig, wie ich die SCL- und SDA-Pins meines uC´s mit dem Treiber verbinde? Kann ich vielleich doch nur mit den SPI Anschlüssen verbinden? Orientiert habe ich mich an diesem Artikel: http://enricojoerns.de/projekte/motorcontrol.html Wobei ich nicht ganz verstehe, weshalb er den JP1 Stecker (Adapter?) braucht und wofür die Dioden (Entsören?) Danke
Florian Müller schrieb: > Leider bin ich mir im Moment unschlüssig, wie ich die SCL- und SDA-Pins > meines uC´s mit dem Treiber verbinde? > http://enricojoerns.de/projekte/motorcontrol.html SDA und SCL deines uCs werden mit den SDA und SCL des Motortreiber-Boards (besser gesagt dem TINY26) verbunden. Welche Pins das sind steht im Schaltplan (im TINY26 Symbol steht auch SDA und SCL drin). SDA mit SDA, SCL mit SCL. I2C braucht 4,7kOhm Pullupwiderstände nach +5V. Florian Müller schrieb: > Kann ich vielleich doch nur mit > den SPI Anschlüssen verbinden? SPI ist nicht I2C - völlig andere Baustelle. Florian Müller schrieb: > Wobei ich nicht ganz verstehe, weshalb er den JP1 Stecker (Adapter?) Das nennt man Pinheader, da schließt man die Kabel (für I2C und Versorgungsspannung) an. Florian Müller schrieb: > und wofür die Dioden (Entsören?) Ein (Schritt)Motor ist eine Induktive Last (wie eines Spule). Eine Induktivität möchte immer den Stromfluss aufrecht erhalten. Wenn man ihr jetzt aber nicht mehr genügend Strom gibt (der Treiber dreht dem Strang den Strom ab), dann "antwortet" die Induktivtät mit einer Erhöhung der Spannung. Diese Spannung kann je nach Motor mehrere 100V groß sein und würde den Motortreiber sofort zerstören. Die Dioden leiten nach Masse ab und verhindern damit das Zerstören des Motortreibers. Und nein da gehen keine Standartdioden.
Danke erstmal Peter. So wie ich das jetzt verstanden habe, bekommt die Motorsteuerung die Daten und den Clock über den Pinheader zum Tiny, der wiederum die Daten zum Treiber sendet? Kann ich den Tiny nicht auch weglassen und stattdessen den LPC1769 als uC verwenden? Ich würde gerne ein Board erstellen, welches als Verbindungsglied zwischen uC und dem Motor funktioniert. Achja, der Motor soll übrigens ein Servomotor sein! (kein Modellbau)
Angehängte Dateien:
-

motorsteuerung.png
10 KB
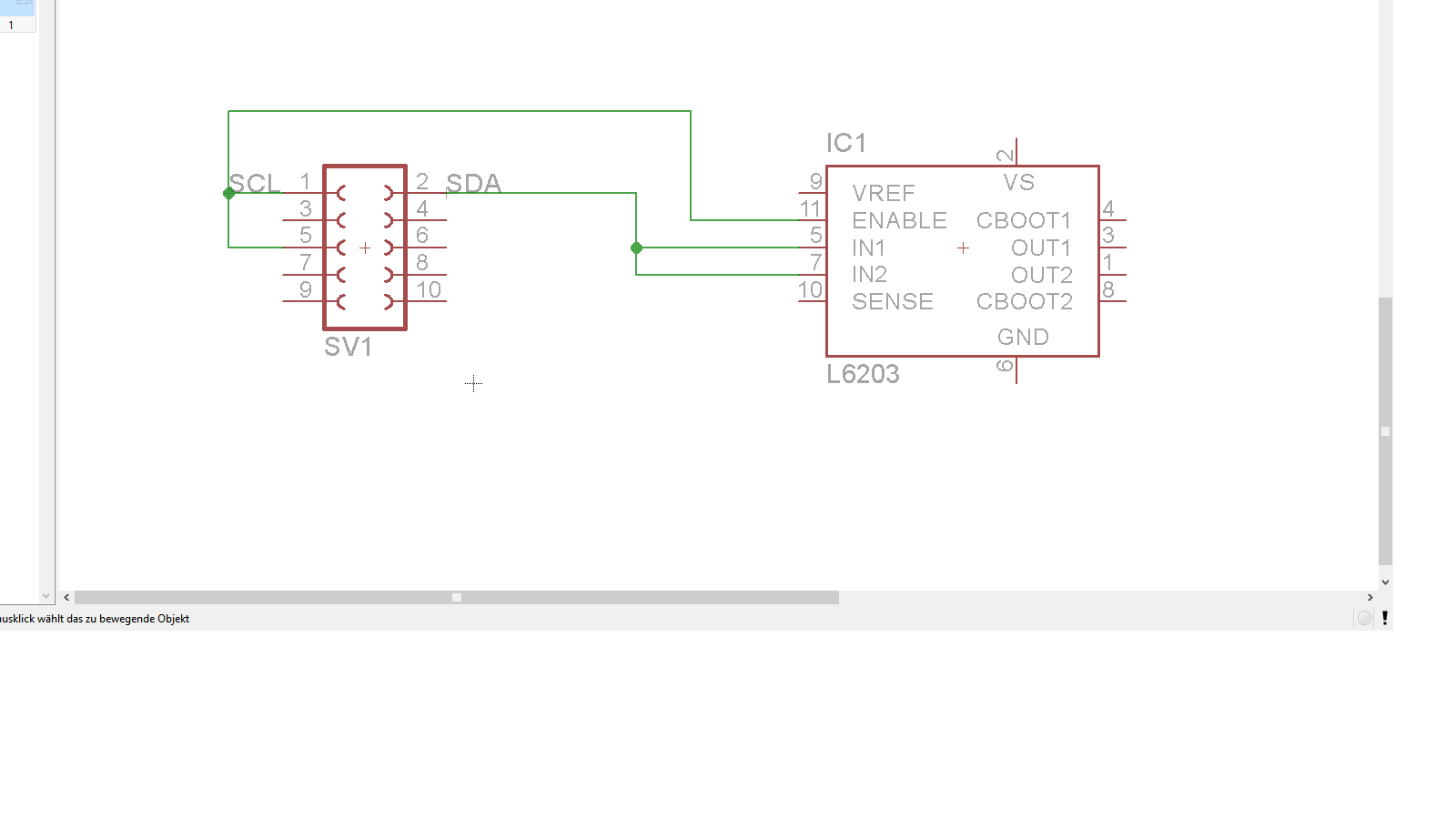
Im Prinzip will ich den Motortreiber mit meinem Cortex-M3 Board so ansteuern wie im Anhang zu sehen ist. Quasi ohne den Tiny26. Vermute allerdings, dass dieser Logikbaustein wohl unabdingbar ist? Das ist auch nur eine schematische Darstellung, dass da noch andere Bausteine hin müssen ist mir bewusst.
@ Florian Müller (lauch_henne) >Im Prinzip will ich den Motortreiber mit meinem Cortex-M3 Board so >ansteuern wie im Anhang zu sehen ist. Quasi ohne den Tiny26. Geht nicht. >Vermute allerdings, dass dieser Logikbaustein wohl unabdingbar ist? Ja. Der Motortreiber allein versteht kein I2C. >Das ist auch nur eine schematische Darstellung, dass da noch andere >Bausteine hin müssen ist mir bewusst. Dann nimm das hier, der muss nicht programmiert werden. Ist aber nur ein "dummer" Portexpander. http://www.mikrocontroller.net/articles/Port-Expander_PCF8574
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.