
Hi Leute, im Anhang seht ihr den Schaltplan um den es geht. Wenn jemand Zeit und Lust hat, könnte er mir meine Fragen beantworten: 1. Wofür sind die STI-Stecker gut? Hat der eine besondere Funktion? Wollte statt den JP1 5 Pol einen JP1 10 Pol Stecker nehmen und die STI Stecker komplett rauswerfen. 2. Warum ist im Schaltplan extra noch diese Powerversorgung aufgeführt? Sind das vielleicht die physischen Anschlüsse für den Strom? 3. Kann mit dieser Schaltung auch ein "richtiger" Servomotor betrieben werden? (also kein Modellbau-Spielzeug). 4. Wie ich sehe, könnte ich mit dem Logikbaustein Tiny26s sowohl in SPI als auch I2C Programmieren richtig? Hier habt ihr das originale Projekt: http://enricojoerns.de/projekte/motorcontrol.html Da ich nur einen Motor betreiben möchte, habe ich den anderen Treiber über Board geworfen. Vielen Dank!
Angehängte Dateien:
-

motorcontroller.png
15 KB
1. Auf den STI-Stecker ist I2C herausgeführt. Anstatt JP1 (ISP-Stecker) solltest du einen 6pol oder 10pol Stecker nach AVR-Norm verwenden. 2. Sieht genau so aus. Sehe würde man das im Layout. 3. Mit dem L6203 kannst du einen Gleichstrommotor bis max. 4A betreiben. 4. Nein, nur ISP.
Angehängte Dateien:
-

motorsteuerun_i2c.png
7,8 KB
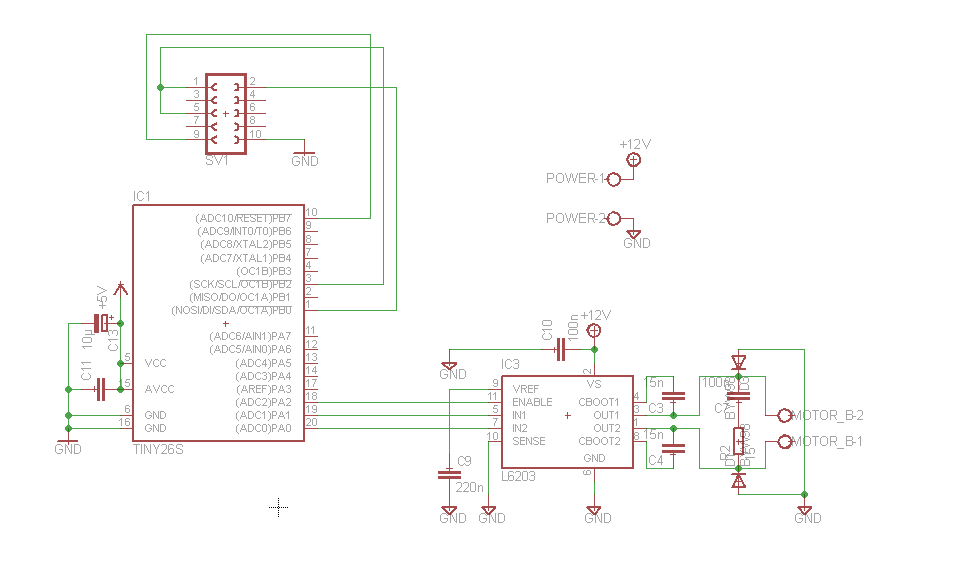
Vielen Dank Hubert! Hubert G. schrieb: > Nein, nur ISP. Könntest du das bitte näher erläutern? Zitat aus dem originalen: "Die I2C-Kommunikation übernimmt ein ATTiny26 Mikrocontroller." Daraus schließe ich, dass es doch klappen muss? Im Anhang habe ich mal einen Schaltplan erstellt, so wie ich es mir vorstelle. Wobei der Stecker SV1 als Schnittstelle zu meinem uC LPC1769 Cortex M3 Evaluationsboard darstellt. Warum sollte es nicht gehen, den Tiny26S mit Hilfe meines uC via dem SV1 Stecker in I2C zu Programmieren?
Hi >Zitat aus dem originalen: "Die I2C-Kommunikation übernimmt ein ATTiny26 >Mikrocontroller." Programmierung und Kommunikation sind zwei paar Schuhe. Über I2C kannst du nur über einen Bootloader programmieren. Und den bekommst du nur über ISP in den AVR. MfG Spess
Wenn ich die Beschreibung des Programms richtig interpretiere, dann werden die Steuersignale für Geschwindigkeit und Drehrichtung über I2C an den Tiny übertragen. Das Programm selbst wird über ISP auf den Tiny übertragen.
Spess53 schrieb: > Programmierung und Kommunikation sind zwei paar Schuhe. Über I2C kannst > du nur über einen Bootloader programmieren. Und den bekommst du nur über > ISP in den AVR. Das heißt, würde der Tiny26S einen Bootloader besitzen, dann könnte ich direkt über I2C programmieren? > MfG Spess Hubert G. schrieb: > Wenn ich die Beschreibung des Programms richtig interpretiere, dann > werden die Steuersignale für Geschwindigkeit und Drehrichtung über I2C > an den Tiny übertragen. > Das Programm selbst wird über ISP auf den Tiny übertragen. Wenn ich das richtig verstehe, dann werden die Steuersignale über I2C via den STI Steckern übertragen und der ISP (Stecker JP1) ist dazu da, dass die Steuersignale/Informationen bzw. das Programm überhaupt am Tiny26S ankommt? Gibt es vielleicht einen Logikbaustein für Motortreiber mit integriertem Bootloader, damit ich mir das mit ISP sparen kann?
Hi >Gibt es vielleicht einen Logikbaustein für Motortreiber mit integriertem >Bootloader, damit ich mir das mit ISP sparen kann? Ist dein LPC1769 Cortex M3 so schwach auf der Brust, das er den L6203 nicht ansteuern kann? MfG Spess
Spess53 schrieb: > Ist dein LPC1769 Cortex M3 so schwach auf der Brust, das er den L6203 > nicht ansteuern kann? Ich wollte anfangs den Treiber direkt via I2C mit meinem Cortex ansteuern. Allerdings meinte ein Kumpel, dass die Treiber kein I2C verstehen und ich somit einen Logikbaustein (Tiny26S) brauche um quasi zu "übersetzen".. Wäre es denn möglich mit einem Evaluationsboard direkt einen Treiber mit I2C bzw ISP anzusteuern? Was für Kriterien müsste mein LPC1769 erfüllen um direkt mit dem Treiber kommunizieren zu können?
Florian Müller schrieb: > Wäre es denn möglich mit einem Evaluationsboard direkt einen Treiber mit > I2C bzw ISP anzusteuern? Nein. Du verstehst kein Stück was hier passiert oder? Dein TREIBER hat funktional drei Steuereingänge Enable: PWM (googlen!!!) zur Regelung der Geschwindigkeit IN1&2: 00=Lerlauf, 01=Links, 10=Rechts und 11=bremsen. Mehr nicht. Der kann kein I2C oder sonst irgend eine Schnittstelle 5V = 1 0V = 0 Fertig. Der ATTiny übersetzt von I2C auf Enable, IN1&IN2 und muss programmiert werden. Florian Müller schrieb: > 3. Kann mit dieser Schaltung auch ein "richtiger" Servomotor betrieben > werden? (also kein Modellbau-Spielzeug). Nein. Das ist ein Treiberbaustein für einen DC Bürstenmotor evtl. noch Schrittmotor. Für einen Servo bräuchtest du einen DC Bürstenbehafteten Servo und vor allem eine Encoderscheibe und eine entsprechende Regelung. Florian Müller schrieb: > 4. Wie ich sehe, könnte ich mit dem Logikbaustein Tiny26s sowohl in SPI > als auch I2C Programmieren richtig? Der Tiny ist kein Logikbaustein sondern ein zu programmierende Mikrocontroller. Dafür braucht man Entwicklungsumgebung, Software und einen Programm. Siehe AVR-Tutorial. Florian Müller schrieb: > 2. Warum ist im Schaltplan extra noch diese Powerversorgung aufgeführt? > Sind das vielleicht die physischen Anschlüsse für den Strom? Das sind die Schraubklemmen (Kreise ohne Plus drin). Da schraubst du die Stromversorgung für den Motor an, Die Kreise mit dem + drin sind nur Symbole die es auf der Platine nicht gibt. Stell dir alle + über einen Draht verbunden vor im Schaltplan. Den Draht lässt man der Übersicht halber weg. Florian Müller schrieb: > 1. Wofür sind die STI-Stecker gut? > Hat der eine besondere Funktion? Wollte statt den JP1 5 Pol einen JP1 10 > Pol Stecker nehmen und die STI Stecker komplett rauswerfen. Das macht man auf die Platine um entweder noch weitere Pins zur Verüfugung zu haben oder es sind Pads (Kupferflächen) auf die man später mit einer Messpitze draufhalten kann.
Florian Müller schrieb: > Was für Kriterien müsste mein LPC1769 erfüllen um direkt mit dem Treiber > kommunizieren zu können? Das kann er ohne Probleme. Nur du kannst es nicht. Du brauchst noch nichtmal einen Pegelwandler. An den LPC schließt du IN1&IN2 an normale GPIO pins an und den Enable an einen PWM-Ausgang. Wenn du die Geschwindigkeit nicht regeln möchtest dann brauchst du auch für Enable keine PWM sondern einfach nur 1 oder 0 schalten. 1. Am LPC LED blinken lassen lernen 2. Am LPC mit PWM eine LED dimmen können 3. Treiber aufbauen, Enable mit +5V, IN1 mit 0V und IN2 mit 5V verbinden. Dann muss sich der Motor drehen 4. IN1 & IN2 und ENable mit dem LPC verbinden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.