

Hallo, ich beschäftige mich zur Zeit mit der Ansteuerung von Brushless Motoren. Die meisten Regler auf Atmega Basis erzeugen ja nur ein High-side PWM und schalten die Low-side hart auf Masse. Welchen Vorteil und Nachteile hat es, wenn man bei, also high-side und low-side per PWM aktiv schaltet? Hat von euch schon einer die AWEX Einheit eines Xmega Controllers verwendet um damit einen Brushless-Motor anzusteuern? Im Anhang gibt es noch die Bilder von meinem kleinem Testaufbau. - Verwendung der Xmega AWEX Einheit - 128MHz Grundtakt zur Erzeugung des PWMs - PWM Auflösung bis 12Bit bei 16KHz, bzw. 32KHz PWM Frequenz - Messung des Shunt mit einem differentiellem 12Bit ADC - interner DMA - Ansteuerung per CAN Bus, UART, I2C, PPM möglich - 3 Signal LEDs - 3 Mosfettreiber IR2102 - 6 IRF Directfets MX Grüße Martin
Angehängte Dateien:
... hat noch keiner damit gearbeitet?
Mit dem XMEGA hab ich noch nicht gearbeitet... Aber: Die LS-PWM bringt dir den Vorteil dass die Verluste die in der HS-Off phase an der Body-Diode des LS Schalters entstehen verringert werden. Das ganze kostet dich dafür halt einen PWM-Port am atmega und eventuell etwas Software-Aufwand. (Shoot-Through protection etc.) Zudem verhinderst du dadurch auch einen hohen Overshoot durch das Reverse Recovery der Body-Diode.
@ Alex W. Die Mosfets habe keine Bonddrähte. Der Die liegt direkt zwischen Platine und dem Metallgehäuse. Dadurch hat man beste Wärmeabfuhr und ein super Schaltverhalten. Such einfach mal nach Directfet von IRF --> http://www.irf.com/product-info/directfet/ @ blablub Die Xmegas haben eine AWEX Einheit, mit der kann man direkt mit einem Timer alle 6 Mosfets anstreuern. Die Einheit erzeugt das High und Low side signal und erzeugt auch die benötigte Todzeit. als Quelle für dem PWM hat mein 128Mhz. Damit lässt sich schon einiges machen. Ich hab das ganze jetzt getestet und es funktioniert auch. Leider erzeugt der zusätzliche Low-side PWM im Vergleich zum nur high-side pwm erhebliche Störungen auf der Platine, sodass es das BEMF Signal sehr verrauscht ist. Durch das Rauschen kommt es zur Auslösung des Komparators und dadurch zu Fehlkommutierungen
http://www.atmel.com/Images/Atmel-8305-AVR928-Scalar-Sensorless-Methods-to-Drive-BLDC-Motors_Application-Note.pdf es wäre schön wenn mein Signal so sauber wie das auf Seite 6 der Appnote wäre. :-(
Martin J. schrieb: > Hat von euch schon einer die AWEX Einheit eines Xmega Controllers > verwendet um damit einen Brushless-Motor anzusteuern? Ja. Allerdings erzeuge ich damit Sinusmodulation und steuere alle 6 H/L Sides mit PWM an. Über die Simpelmethode kann ich dir also nicht viel sagen.
Angehängte Dateien:
-

aktfreilauf.png
24 KB
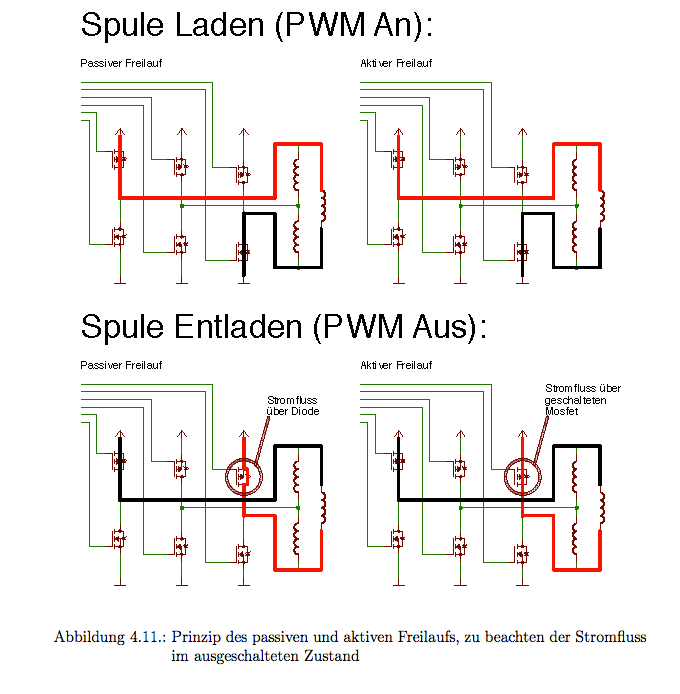
Ich hab sowas ähnliches gebaut, nur wohl ne Nummer kleiner. Mit ATtiny861 (der kann auch beide High+Low mit PWM, diff. ADC usw.) und alles so groß, dass ne 30x15mm Platine am ende entstehen kann. Der einzige Vorteil dabei ist wie schon gesagt, dass in der Off-Zeit der Strom über den Mosfet fließt und nicht über dessen Bodydiode. Im Anhang das Bild dazu aus meiner Dipl. Arbeit. Es gibt aber auch Mosfets in SO8 mit integrierten Schottky Dioden, dann wird es für low-cost Anwendungen schon schwierig den Steueraufwand zu rechtfertigen.
Kann mir jemand folgenden Effekt erklären? Ich betreibe den Motor mit einem konstantem PWM Verhältnis, dabei läuft er fast rund und zieht ohne last so gut wie keinen Strom. Weiterhin habe ich habe bei meinem Board die typische Mittelpunktschaltung für den Comparator verwendet. Gehe ich jetzt mit einem differentiellem Tastkopf an den Mittelpunkt und an eine Phase für den Komparatoreingang, um das Signal zu überprüfen, so wird der Motor wesentlich schneller und läuft ruhiger. Es reicht auch schon wenn ich die isolierte Tastspitzenverlängerung daran halte. Das gemessene Signal sieht dann super aus. Leider bekomme ich das Ergebnis mit der Tastspitze nicht durch irgendeinen Kondensator oder ähnliches reproduziert, meistens verschlechtert es nur den Zustand. Bitte klärt mich auf.
Martin J. schrieb: > Kann mir jemand folgenden Effekt erklären? > > Ich betreibe den Motor mit einem konstantem PWM Verhältnis, dabei läuft > er fast rund und zieht ohne last so gut wie keinen Strom. Weiterhin habe > ich habe bei meinem Board die typische Mittelpunktschaltung für den > Comparator verwendet. Prüfst du nur auf eine Comp. Änderung oder auch welche Richtung?
die Richtung wird auch überprüft
Angehängte Dateien:
-

backemf.png
25 KB
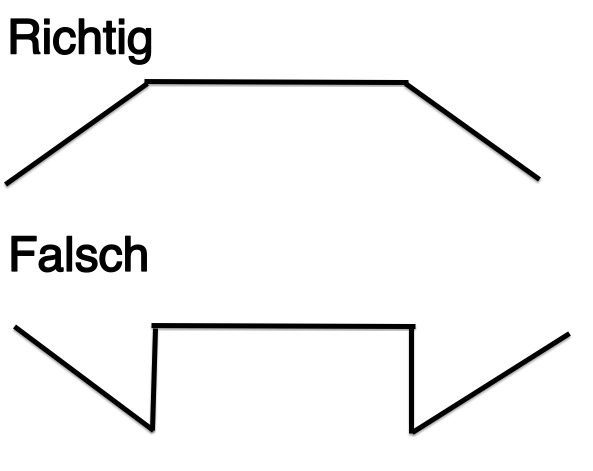
So einen Effekt hatte ich nur mal als ich nicht geprüft habe in welche Richtung die Flanke ging. Aufm Oszi sieht man ja auch ganz gut ob die Back-EMF Formen in die richtige Richtung gehen. (Plateau mit anliegenden steigenden/fallen Flanken, wie im Anhang) Ansonsten hatte ich mit dem "normalen" 4.7k/100n Aufbau nie Probleme. Da wirst du wohl ums Code/Schaltplanzeigen nicht rumkommen...
@Martin J.: Wie bekommst du es hin das dein Motor sauber anläuft? Gruß Steffen
Steffen Ha schrieb: > @Martin J.: Wie bekommst du es hin das dein Motor sauber anläuft? > > Gruß Steffen Man sollte in einem Forum keine Fragen an spezifische Leute stellen, wenn sie auch von anderen beantwortet werden kann. Ich benutze dafür ein fixen Duty Cycle und eine Tabelle mit Kommutierungsdelays. Das ganze ist natürlich vom Motor, Spannung usw. abhängig, meine Variante funktioniert aber für Motoren mit Propellern zuverlässig.
entweder so oder man gibt einen harten Strompuls auf eine der Phasen.
Martin J. schrieb: > entweder so oder man gibt einen harten Strompuls auf eine der Phasen. Das erschließt sich mir nicht... dann dreht er ja ggfs. in die falsche Richtung?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.