Tobias Plüss schrieb:
> nicht auch? Meine Überlegung war, dass ich den I-Anteil nur dann weiter
> aufintegriere, wenn das Stellglied nicht am Anschlag ist.
Du vermischt da jetzt 2 Dinge.
Zum einen hast du eine wie auch immer geartete Begrenzung durch das
Stellglied. Mehr als auf Anschlag fahren geht nun mal nicht. Wenn ein
Fenster offen ist, dann ist es offen, egal ob die Steuerung den
Fensterflügel gerne noch mal um 720° weiter offnen würde.
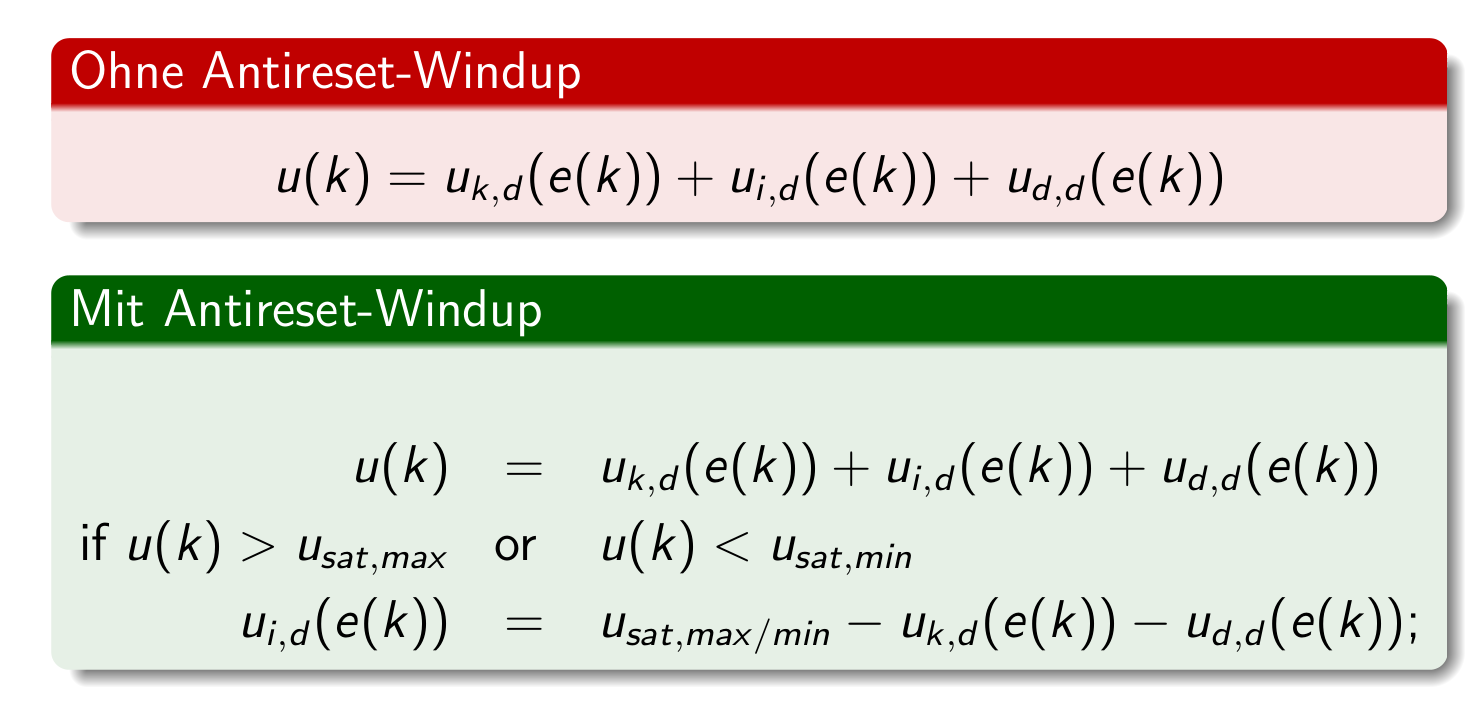
Das andere ist die Begrenzung des Integralsanteils.
Denn dadurch, dass du das Stellglied begrenzt, kann der Fehler erst mal
nicht so schnell zurückgehen wie die Regelung das gerne hätte. Durch das
Aufsummieren des Fehlers wird die Summe aber immer größer und größer.
Das wäre noch nicht das große Problem, aber: die Summe muss ja auch
wieder kleiner werden, wenn dann die Wirkung des Stellgliedes zu greifen
anfängt. Denn die Regelabweichung wird dann ja wieder kleiner. Nur: Die
Summe der vorhergehenden Regelabweichungen ist immer noch astronomisch
hoch und diese Summe wird auch nicht wesentlich kleiner, eben weil sie
so hoch ist. Mit der Folge, dass die Regelung dann enorme Ausschläge in
die Gegenrichtung macht, damit sie die Summe wieder runterbringt. Was
dann insofern kontraproduktiv ist, als dann das System in die andere
Richtung ausbricht.
Beispiel:
Du möchtest eine Kurve fahren. Die Hersteller des Autos haben eine
Begrenzung des Stellgliedes gemacht. D.h. ab einem bestimmten Winkel
nimmt der Einschlag der Räder nicht mehr zu. Das ist auch gut so.
Aber sie haben vergessen, den Integralteil der Regelung zu begrenzen.
Der da wäre: du kannst an deinem Lenkrad 200 Umdrehungen machen, ohne
gebremst zu werden. Die Räder werden zwar irgendwann nicht mehr
mitgenommen (weil 'Begrenzung des Stellgliedes') aber drehen am Rad
darfst du soviel du willst.
Was wird passieren:
Du lenkst in eine Kurve ein. Blöderweise möchtest du die Kurve noch
enger haben, also drehst du nach links. Die Räder gehen aber nicht mehr
mit. Du drehst weiter am Lenkrad und weiter und weiter und weiter. Du
hast schon 100 Umdrehungen am Lenkrad, möchtest die Kurve noch enger
ziehen, was aber nicht geht, weil die Räder das nun mal nicht mehr
können.
Soweit so gut. Jetzt wird die Strasse wieder gerade und du musst aus der
Kurve raus. Die Räder stehen vielleicht nur um 30° verdreht. Aber du
musst jetzt erst mal die 100 Umdrehungen, die du am Lenkrad gemacht hast
wieder rückgängig machen, bis du das alles wieder aufgelöst hast und die
Radanlenkung wieder 'am Lenkrad hängen' hast.
Daher: es reicht nicht, den Radeinschlag zu begrenzen. Du musst auch
dafür sorgen, dass der INtegralteil nicht über alle Massen wachsen kann.
Denn das muss ja irgendwann auch alles wieder aufgelöst werden!