Hallo liebe Community,
ich bin langsam kreativ an meinen Grenzen und weiß nicht mehr weiter.
Es geht um folgendes, ich möchte zuerst, dass ein analoger Wert von
einem Potentiometer eingelesen wird. Danach soll nach einem Startbefehl
eine Variable (in einer ISR) von maximal (1024 digits) zu dem
eingelesenen Wert dekrementiert werden.
Wenn der Anlauf durchgelaufen ist, soll danach der Wert des
Potentiometers normal eingelesen werden.
Zuerst der Code:
Der Code macht auch alles schön was er soll. Nur leider halt nicht alles
;)
Zwei Probleme hab ich:
1) Könnt ihr mir sagen, warum ALPHAIst den Wert aus der ISR zur Main
überträgt, obwohl ich der ISR keine Adresse übergeben habe
2) Wenn ich den Controller aktiviere (Buttenpressed ok) dann zeigt er
mir zuerst den Wert an der am Potentiometer (ADC_Lesen()) eingestellt
ist, springt danach auf AlPHAIst = 1023 und verkleinert ALPHAIst solange
bis er auf ALPHAsoll (ADC_Lesen()) trifft.
Alles wäre so schön wenn er diesen allerersten Impuls auf (ADC_Lesen())
nicht machen würde.
Achja mit ALPHA wird der Mikrocontroller für die Anwendung die schon
läuft auf unser 50 Hz Netz synchronisiert.
Damit muss irgendein ALPHA Wert zwingend zurückgegeben werden.
Ich habe irgendwie schon alles ausprobiert und bekomme das Problem
dieses ersten ADC_Lesen impulses nicht in den Griff.
Entweder bin ich zu blöd oder der ATMega ist zu stark (Aber die Nerven
sind weg ^^^;))
Keine Ahnung was du da rumrechnest. Im Moment tu ich mir extrem schwer
deinen Code mit der Beschreibung dessen, was du erreichen willst, in
Einklang zu bringen. Das kommt mir alles deutlich zu kompliziert vor.
>ALPHAIst=1023-zaehler4;// Jeden Interrupt soll AlPHaIst an AlPHASoll näher herangetragen werden
5
>
6
>}
7
>
was spricht gegen
1
ISR(TIMER4_COMPA_vect)
2
{
3
if(!sanftanlauf_durch)
4
{
5
if(ALPHAsoll<ALPHAIst)
6
ALPHAIst--;
7
elseif(ALPHAsoll>ALPHAIst)
8
ALPHAIst++;
9
else
10
sanftanlauf_durch=1;
11
}
12
13
TCNT4=0;// Timer 4 wird wieder auf 0 gesetzt
14
}
Mit jedem ISR Aufruf wird ALPHAIst ein Stückchen näher an ALPHAsoll
herangeführt.
Was du da allerdings in der Hauptschleife inszenierst, ist mir nicht
wirklich klar.
(anstatt dem TCNT4 auf 0 setzen, wäre ein CTC Modus die bessere Wahl,
aber das ist momentan ein Nebenschauplatz).
Hallo Karl-Heinz,
danke für die schnelle Antwort.
Das mit der komplizierten Beschreibung tut mir leid.
Ich probier es nochmal anders:
Das Problem liegt nicht unbedingt in der ISR. (Es spricht absolut nichst
gegen deine Möglichkeit)
Der ALPHAIst wird ja verkleinert und das geänderte Ergebnis auch
ausgegeben bis sanftanlauf_durch ist.
Leider gibt er auch direkt am Anfang das Signal aus, welches man
eingestellt hat. Und nicht den maximalen Wert 1023, damit gewährleistet
ist, das immer ein Maximaler ALPHA Wert zuerst ausgegeben wird und
danach die entsprechend kleineren.
Ich weis gerade nicht wie ich das Problem näher einkreisen könnte.
Und ja der CTC Modus wäre das selbe.
So wie ich das sehe, hast du doch im main() im Prinzip eine
Statemaschine vorliegen, oder nicht.
Die hat 3 Zustände
* vor dem Start
* nach dem Start, aber der Softanlauf läuft noch
* nach dem Softanlauf
Dann programmier das doch auch so
1
#define PRE_START 0
2
#define SOFTSTART 1
3
#define REGULAR 2
4
5
uint8_tstate;
6
7
intmain()
8
{
9
....
10
11
state=PRE_START;
12
13
while(1)
14
{
15
switch(state)
16
{
17
18
casePRE_START:
19
ALPHAsoll=ADC_Lesen();
20
ALPHAist=ALPHA=1024;
21
22
if(ButtonPressed(0,PINA,2,500))
23
state=SOFTSTART;
24
break;
25
26
caseSOFTSTART:
27
ALPHA=ALPHAist;// ALPHAist wird von der Timer ISR runtergezählt
Das wäre für mich recht naheliegend.
Wenn dieser Softwanlauf nur ein einziges mal gebraucht wird, dann könnte
man das auch nach dem Muster vereinfachen
1
intmain()
2
{
3
....
4
5
// Vorgeplänkel. AUf den Start warten
6
do
7
{
8
ADCeinlesenundalsALPHAsollspeichern
9
ALPHAgleich1024ausgeben
10
}while(!ButtonPressed(...))
11
12
// Softanlauf
13
ALPHAist=1024;
14
while(ALPHAist!=ALPHAsoll)
15
ALPHAistausgeben;
16
17
// Softanlaufphase ist vorbei. reguläre Arbeit aufnehmen
18
while(1)
19
{
20
ALPHA=ADC_Lesen();
21
...
22
}
23
}
IMHO hast du dich dadurch verzettelt, dass du zuviel Logik in ein paar
Zeilen Code quetschen willst. Dazu benutzt du dann 25 Flags und
Hilfsvariablen und irgendwann durchschaut man dann deren Zusammenspiel
nicht mehr.
Ok warte,
ich gehe nochmal in mich und versuche es so deutlich wie möglich zu
formulieren.
Ich lese beim buttonpress in der Main den Wert der aus dem Poti kommt =
den ADC zurückgibt (ADCW). Und obwohl ich dem Prozessor sage nimm den
Wert den ich dir berechne im ISR(Timer4_CompA_vect) und erst wenn ich
durch bin nimm den ADCW. Macht er den allersten Zugriff auf den ADCW.
Und das allerschlimmste das macht er nur 4 von 10 mal.
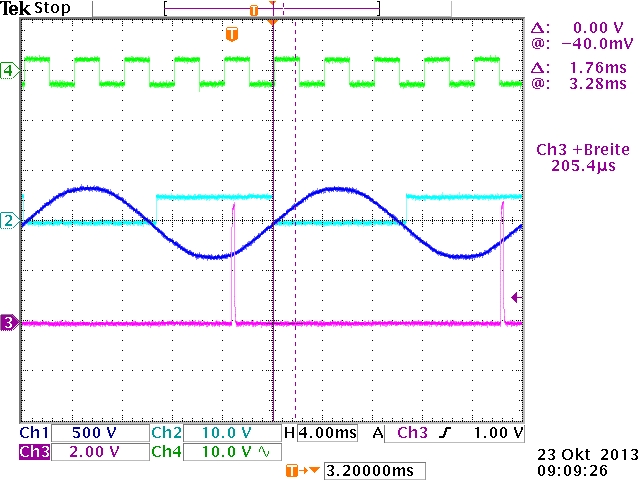
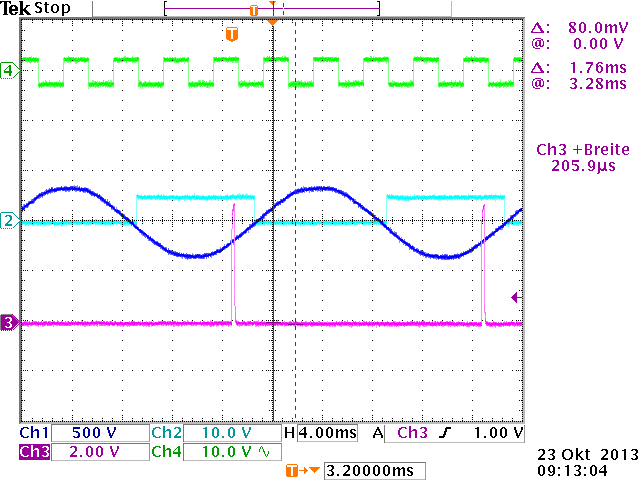
Ich bekomme diese Gewissheit von einem Oszilloskop welches ich so
eingestellt habe das es bei einer horizontalen Abweichung von einem
Messwert einen single Shot (single seq) mir ein Bild macht welches ich
mir dann anschauen kann.
Vielleicht wird es klarer wenn ich die Bilder hier auch poste.
Wie man sieht soll der ALPHA den roten Impuls von der Mittellinie nach
links verschieben. Gelb ist das Netz, Blau die Nulldurchgangserkennung.
Und irgendwie schaffe ich es nicht dem Compiler zu sagen, nehme den
maximalen möglichen Digit (1023) der 1.6 ms nach Netzdurchgang kommt und
verkleinere diesen Digitwert bis dorthin wo du stehen sollst.
Konnte ich das so klarer Darstellen?
Fabian B. schrieb:> Und irgendwie schaffe ich es nicht dem Compiler zu sagen, nehme den> maximalen möglichen Digit (1023) der 1.6 ms nach Netzdurchgang kommt und> verkleinere diesen Digitwert bis dorthin wo du stehen sollst.>> Konnte ich das so klarer Darstellen?
Ja.
Und jetzt schau dir noch mal die Codesnippets an, die ich im letzten
Post gemacht habe. Beide Varianten lösen IMHO genau dieses Problem,
indem sie nicht alles in 3 Zeilen Code zu quetschen versuchen, sondern
ganz einfach deine Anlaufphase in 3 voneinander getrennte Phasen
aufteilen und dort explizit und leicht verständlich die jeweils
relevanten Dinge abhandeln. Was immer das dann auch in der jeweiligen
Phase sein mag.
Hi Karl-Heinz,
das ist richtig.
Die drei cases existieren und an die Case funktion an sich habe ich noch
gar nicht gedacht.
Ich programmiere diese mal aus und hoffe das das Problem dadurch gelöst
ist.
Bis dahin danke schon mal für die Idee.
Und ich halte euch/dich auf dem laufenden.
Lg Fabian
Hallo Community,
lieber Karl Heinz,
die Idee mit der Switch Case Funktion war super. Das Programm ist
dadurch viel intuitiver erfassbar. Leider existiert das Problem mit den
falschen Zündimpulsen (Bilder beim Post heute Mittag beachten) immer
noch. So dass er manchmal (bisher 12 von 20) Zündungen richtig macht und
manche (20-12=8 ^^) falsch.
Mir ist leider auch schleierhaft wieso er immer noch (jedoch nur ab- und
an) den falschen ADCW wert sofort schreibt obwohl es jetzt klar ist, das
der Compiler das so nicht tuen sollte.
Bin für jeden Hinweis dankbar auch gerne in die Richtung "Wieso braucht
die ISR keine Schreibberechtigung um den Wert von ALPHAIst zu verändern"
(Irgendwie hab ich so ein Bauchgefühl das es daran liegt)
Lg Fabian
Fabian B. schrieb:> Bin für jeden Hinweis dankbar auch gerne in die Richtung "Wieso braucht> die ISR keine Schreibberechtigung um den Wert von ALPHAIst zu verändern"
Weil das eine globale Variable ist.
Jeder der will, darf drann rummachen.
> (Irgendwie hab ich so ein Bauchgefühl das es daran liegt)
das einzige was daran problematisch ist, ist das Problem, dass du da
einen atomaren Zugriff drumm herum legen musst, weil das eine 16 Bit
Variable ist und der AVR die nicht in einem Rutsch lesen kann.
d.h. du solltest tunlichst in der Hauptschleife so was
1
....
2
cli();
3
Wert=ALPHAist;
4
sei();
5
mit'Wert'weiterrechnen
6
...
machen, anstelle von direkten Zugriffen auf ALPHAist.
Danke
Probier ich gleich aus.
Leider sieht es bisher so aus als ob das das Rätsel Lösung noch nicht
ist. Falls noch weitere Ideen herumgeistern immer her damit.
Vielen Dank für alles bisher
Lg Fabian
ist zum Beispiel eine ausgesprochen schlechte Idee.
Divisionen immer soweit wie möglich nach rechts in den Berechnungen
schieben! Hier verlierst du extrem an Genauigkeit. Das ist eine
Integer-Division! Die produziert keine Nachkommastellen! Das Ergebnis
von 7/5 ist 1 und nicht 1.4
Hi
>int ADC_Lesen(void)>{>ADCSRA |=(1<<ADEN); //ADC aktivieren>....> ADCSRA &= ~(1<<ADEN); //ADC deaktivieren>return ADCW; //Ergebnis von 0 bis 1023 ausgeben
}
Datenblatt:
A normal conversion takes 13 ADC clock cycles. The first conversion
after the ADC is switched on (ADEN in ADCSRA is set) takes 25 ADC clock
cycles
in order to initialize the analog circuitry. When the bandgap reference
voltage is used as input to the ADC, it will take a certain time for
the voltage to stabilize. If not stabilized, the first value read after
the first conversion may be wrong.
Schalte den ADC einmal in der Initialisierung an und lass dann die
Finger von ADEN.
MfG Spess
Hallo Karl-Heinz,
ja das mit der Integer Rechnung ist mir bekannt. Ist jedoch erstmal kein
Problem, da ALPHA eine Wert zwischen 20000 und 75000 bekommt, da sind
dann die Kommazahlen rein rechnerisch nicht vorhanden.
Hallo Spess53 ein guter Hinweis. Die Stelle im Datenblatt kenne ich. Ich
hatte euch vorenthalten das bei der Initialisierung das ADSC Bit mit
gesetzt wird und damit schon eine Umwandlung läuft, dessen Wert dann
durch die nächste Umwandlung in meinem Hauptprogramm wieder
überschrieben wird.
Hm... ich hatte gedacht das das wichtige Bit das ADSC Bit ist, denn
damit wird die Umwandlungen gestartet und man danach das ADEN Bit wieder
löschen kann (Das ADC Register somit wieder deaktiviert [Hintegrund:
Wenn man die Werkbank verlässt, schaltet man doch das Licht aus, oder
habe ich mir damit ein eigenes Bein gestellt])?
Lg Fabian
Ok,
Update:
Auch wenn ich das ADEN Bit nur in der Initialisierung setzte und von der
ADC Hardware das ADSC Bit rücksetzen lasse, komme ich immer noch nicht
an den allerersten Wert des ADCW der mal (52%) bei max anfängt (richtig)
und mal (48% im groben)bei dem eingestellten Wert vom Poti (falsch).
Gut der Fehler wird durch eure Tipps immer näher eingekreist, leider ist
er immer noch nicht erschlagen.
Um mal Starship Troopers zu zitieren: "Ich hasse Bugs"
Somit sieht es so aus:
Durch switch case Funktion ist das ganze Intuitiv erfassbar.
Durch das einmalige setzen von ADEN ist auch diese Fehlerquelle behoben.
Ich hoffe nicht das aus Starship Troopers die unendliche Geschichte
wird.
Lg