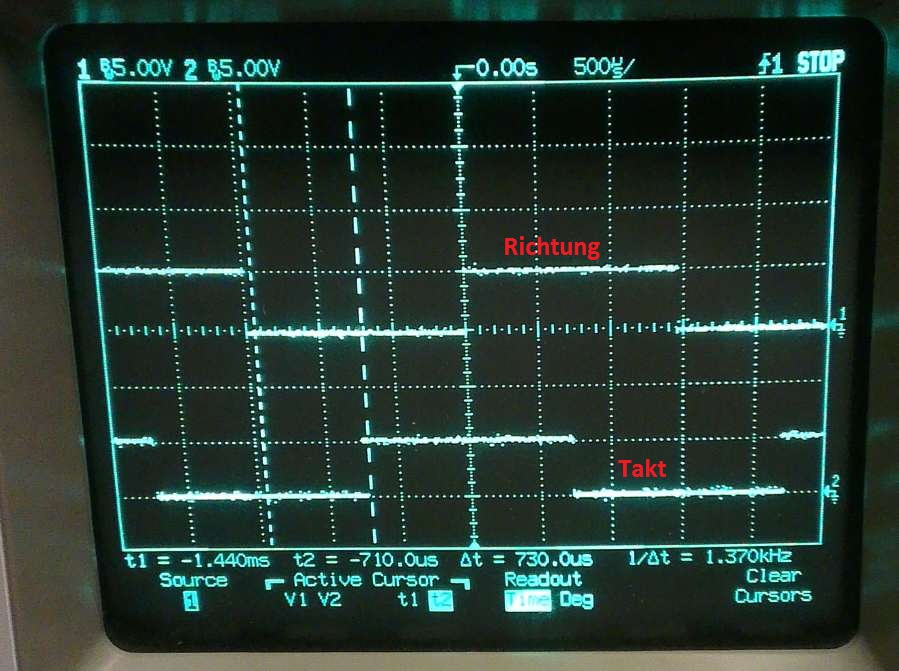
Hallo Gemeinde! Ich baue mir eine CNC Maschine, die mit Schrittmotoren angetrieben und von Mach3 gesteuert werden soll. Mechanisch ist alles eigentlich schon fast fertig. Nun bin ich bei der Inbetriebnahme der Schrittmotoren und von Mach3. Hierbei habe ich folgendes Problem: Wichtige Infos: Motor: Nanotec ST8918M4508 Motorsteuerung: Nanotec SMCI36 Einstellungen auf der Steuerung: Takt-Richtungs Modus links im Viertelschritt-Betrieb. Aktiv sind nur 2 Eingänge: Input 6: Takt, Input 5: Richtung Alles andere ist auf "Benutzerdefiniert". PC: Älteres Modell, Pentium 4, 2 GHz. Ich habe nun das Problem, dass sich der Motor nicht wie gewünscht dreht, wenn ich ihn durch Mach3 angsteuert mit den Pfeiltaste jogge. Das äusserst sich durch pfeiffen und eine zitternde Motorwelle. Ich habe schon diverste Einstellungen bei Motor tuning verwendet und bin jetzt zum Schluss gekommen, dass der Fehler irgendwas mit dem Richtungseingäng der SMCI36 zu tun haben muss. Trenne ich die Verbindung von Mach3 zum Richtungseingang der SMCI36, so dreht der Motor ruhig und in der gewünschten Drehzahl. Natürlich nur in eine Richtung. Bei der Konfiguration der Motorsteuerungen habe ich die Software NanoPro verwendet. Starte ich den Motor aus dieser Software heraus, so dreht er schön angenehm und ruhig. Daher schliesse ich eine falsche Verdrahtung aus. Im Handbuch von NanoPro steht auch etwas davon, dass der Richtungseingang 150us vor dem Takt eingang gesetzt werden muss. Schaue ich mir die beiden Signale mit dem Oszi an, so wird diese Zeit korrekt eingehalten. Siehe Anhang. Der Motor stottert trotzdem nur vor sich hin. Was ich nicht verstehe, wiso gibt Mach3 auch beim Richtungssignal ein gepulstes Signal aus, wenn ich nur in eine Richtung fahren möchte? Mach3 braucht doch nur am Anfang das Signal korrekt zu setzten und dann zu takten. Finde das ganze ziemlich kacke, da ich extra Probleme dieser Art vermeiden wollte und daher die teueren Nanotec Steuerungen bestellt habe. Jetzt hätte ich lieber die Beast von Benezan bestellt... Wäre super wenn hier jemand einen Tipp hätte, wie ich das doch nicht hinkriegen kann.
Angehängte Dateien:
-

richtung_takt.jpg
140 KB
Indexder schrieb: > Was ich nicht verstehe, wiso gibt Mach3 auch beim Richtungssignal ein > gepulstes Signal aus, wenn ich nur in eine Richtung fahren möchte? Das Oszibild sieht mehr nach den Phasensignalen zur direkten Ansteuerung der Spulen aus. Mit Richtung und Takt hat das wenig zu tun.
Jawohl dein Hinweis ist absolut richtig, wie ich soeben herausgefunden habe: Das Problem liegt an einer Standardeinstellung von Mach3: Unter "Ports and Pins" muss das Häckchen bei "Max CL Mode Enabled" unbedingt entfernt werden. Ansonsten gibt Mach3 keine "normalen" Step/Direction Signale aus. Nun fuktioniert alles wie gewünscht :) Jetzt macht es für mich auch Sinn, dass die Einstellungen (1-5 us) der Step Pulse Width im Motor tuning Menü überhaupt keinen Einfluss hatten... ;) Ich danke trotzdem bestens für deine Antwort. Für einen Mach3 kenner ist diese Einstellung wohl klar. :) Beste Grüsse
Nun habe ich noch eine weitere Frage zu diesem Thema: Heute ist mir folgendes aufgefallen: Lasse ich die Motoren aus der NanoPro Software mit 10 U/s drehen, so drehen diese sehr ruhig und gleichmässig und leise. Steuere ich jedoch die Motoren aus Mach3 mit dieser Drehzahl an, so sind die Motoren erheblich lauter und fiepen und der Lauf ist eher abgehackt als gleichmässig. Die Step/Direction Signale sehen nun OK aus, die Step Pulse sind ca. 2 us lang und das Direction Signal bleibt stabil. Auch bei der maximalen Drehzahl, die man noch fahren kann erreiche ich direkt mit der NanoPro Software ca. 900 RPM. Mit Mach3 erreiche ich maximal 650 RPM, bis der Motor nichtmehr folgen kann.. Wie kann das sein? Da sollte es doch keinen Unterschied geben.. Ansteuerung ist nun im Viertel-Schritt Betrieb.
Der Unterschied dürfte der Jitter sein. Das kann man aber mit einem einfachen Oszilloskop nicht messen. Wenn die Takte immer mal wieder ein wenig früher oder später kommen überlagerst du dem Drehfeld Oberwellen, denen der Motor im einfachsten Fall nicht folgt und die ihn im schlimmsten Fall aus dem Tritt bringen können. Der interne Controller der Endstufe hat einfach ein deutlich besseres Echtzeitverhalten als der PC. Wenn du einen Smooth-Stepper verwendest, dürfte es auch mit Mache3 deutlich besser werden, weil dann die Echtzeitaufgaben auf den externen Controller verlagert werden. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Thorsten! Deine Erklärung macht Sinn, danke. Hast du zufällig Erfahrung mit einem SmoothStepper und kannst hier etwas empfehlen? Oder soll ich komplett auf eine andere Steuerungssoftware + externem Motion controller gehen? Nur hier ist die Auswahl so riesig, das erschlägt einem fast...
Mit dem Smoothstepper habe ich keine Erfahrung. Ich habe bevor Mach2
(Vorgänger von Mach3) aufkam einen eigenen USB-Controller entwickelt.
Die Entwicklung hat sich aber so lange hingezogen dass sie mit dem
Aufkommen von Mach2 überholt war, weil die meisten Kunden mit der
Performance der LPT-Lösung zufrieden waren. Den Controller ("NC-Pilot")
vertreibe ich noch, allerdings nicht für CNC-Anwendungen, sondern für
Laborautomatisierung und 3D-Fotografie. Also Anwendungen wo die
Achsbewegung mit anderen, kundenspezifischen Programmabläufen koodiniert
werden muss.
Mit dem ncUSB von WinPCNC habe ich noch Erfahrung, wenn es um CNC geht.
Herr Lewetz hatte bei WinPCNC von Anfang an eine Lösung mit externem
Achscontroller, der per RS-232 angebunden wurde und eine Industrie
PC-Karte enthielt. Später kam dann der ncUSB hinzu, in dem ein uC
werkelt, der per USB angeschlossen wird.
Mit freundlichen Grüßen
Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.