
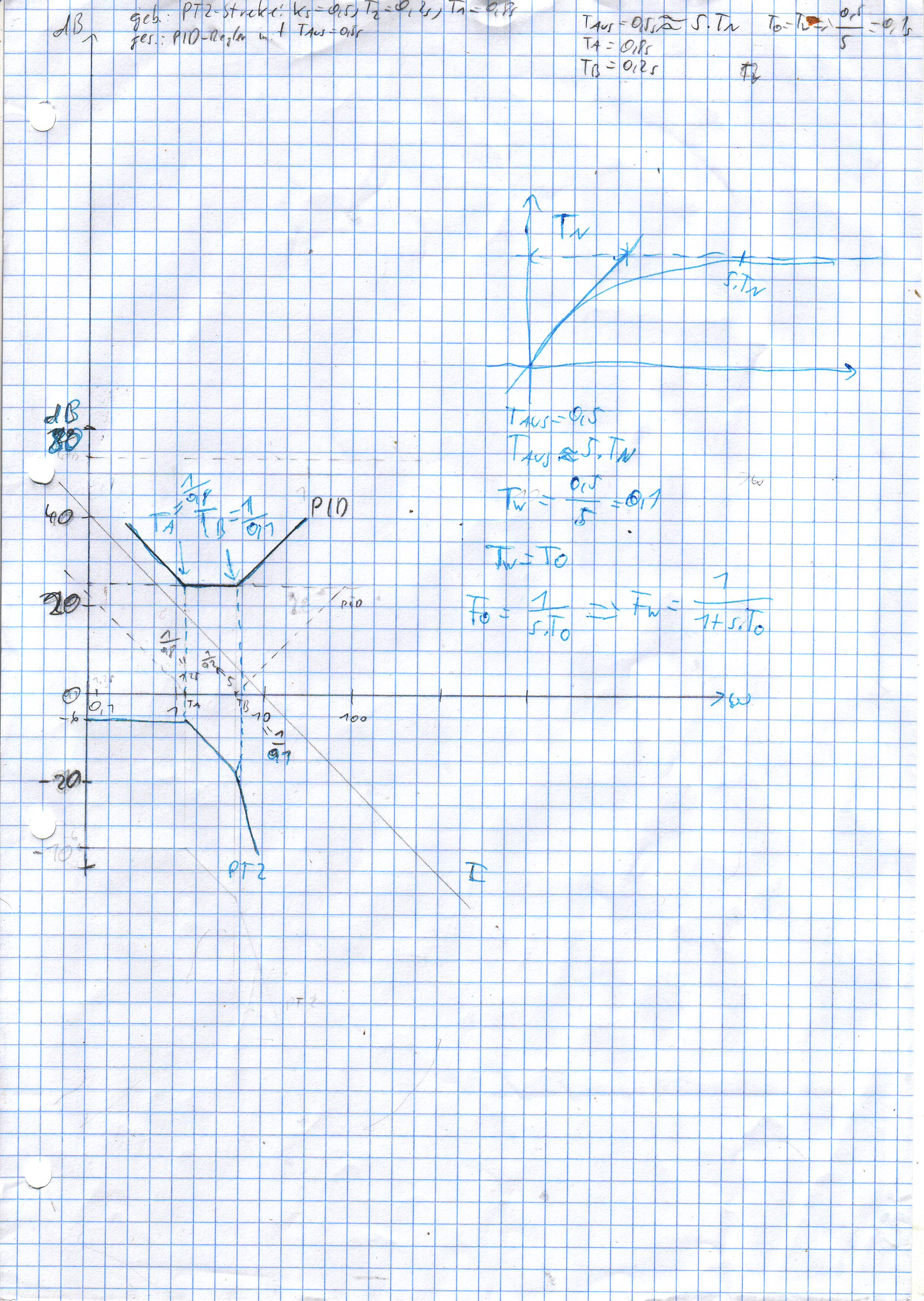
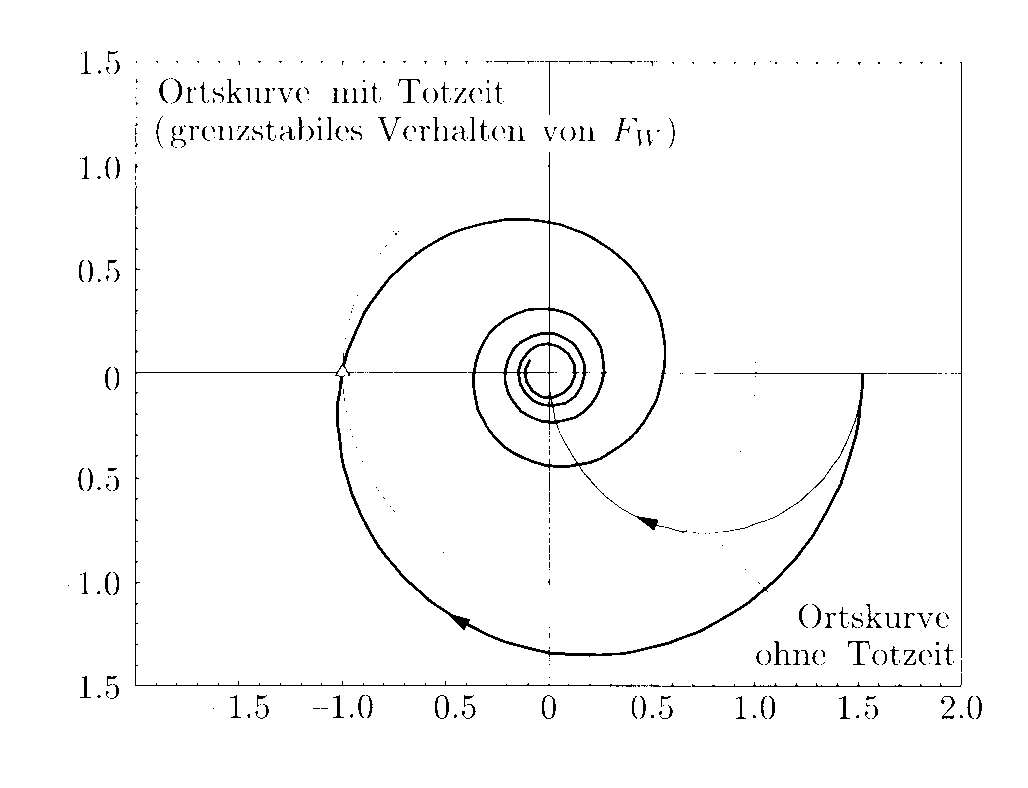
Hallo zusammen! Ich hab ein paar Fragen zur Regelungstechnik, da mir Google und mein Buch nicht wirklich dabei helfen können. Ich möchte hier einfach 2 Theman behandelt: Stabilität und Reglerentwurf. Ich werde versuchen ein paar Dinge auch zu "erklären" und Fragen zu stellen. Wenn es geht bitte antwortet im Zitat direkt unter meine Fragen, so ist es besser für die Übersicht. Nur wenn es möglich ist, ansonsten machsts nix :). Würde mich freuen, wenn ihr mir da ein bisschen weiterhelfen könntet. Danke im voraus! mfg gamdschiee Hier die Fragen: ______________________________________ Standartregelkreis: http://commons.wikimedia.org/wiki/File:Einfacher_Regelkreis_n.svg 1. Zum Thema Stabilität: Also, so ein Regelkreis soll ja möglichst stabil sein. Es gibt: instabil, grenzstabil und stabil. An den Polstellen der Führungsübertragungsfunktion erkennt man doch, ob ein Regelkreis stabil, instabil oder grenzstabil ist. Richtig? Aber kann man das auch an der Übertragungsfunktion des Reglers oder einer Regelstrecke alleine auch ausrrechnen? Also wenn nur der Regler z.b. instabil ist, dann nehme ich an, dass der gesamte Regelkreis instabil ist, oder? 1.1 Nyquistkriterium: http://upload.wikimedia.org/wikipedia/commons/a/ad/Spezielles_Nyquistkriterium.svg Dieses liefert ja eine Aussage über die Stabilität eines Regelkreises. Man verwendet ihr den Frequenzgang der offenen Regelschleife Fo(s). Der sogenannte Nyquistpunkt ist doch bei (-1/0). Wenn die Ortskurve von Fo durch diese Punkt geht, dann ist der Regelkreis grenzstabil. Wenn der Punkt links von der Ortskurve liegt, dann ist er stabil und wenn er rechts davon liegt, dann ist er instabil. Gut, das kann man sich mal einfach so merken. Ist ja nicht schwer. Doch, warum wird jetzt genau die Ortskurve des offenen Regelkreises(also ohne Rückkopplung)Fo aufgezeichnet? Warum spielt nur diese eine wichtige Rolle zur Aussagung der Stabilität eines Regelkreises? Und warum ist der Punkt gerade auf 1/0 und ist hier grenzstabil? Warum ist, wenn die Ortskurve rechts von ihm ist, stabil? Kann man das "einfach" erklären, oder sind dazu komplizierte Rechnungen nötig? 1.1.1 Das ganze kann man statt in der Ortskurve auch im Bodediagramm darstellen Hier wird gezeigt: Phasenverschiebung von -180° --> |F0(jw)|<1 --> stabil Phasenverschiebung von -180° --> |F0(jw)|=1 --> grenzstabil Phasenverschiebung von -180° --> |F0(jw)|>1 --> instabil Was wird hier um -180° phasenverschoben? Der ganze geschlossene Regelkreis? Warum gerade -180°? Wie verschiebt man sowas um gerade -180°? Und warum wird hier der Betrag davon verwendet? Der Betrag ist doch so eine art lineare Funktion, wenn man diesen im koordiaten-System(Realteil, Imaginärteil) anschaut, oder? 1.2 Stabilitätsgüte: Amplitudenrand Ar: Ist jener Faktor, um den die Verstärkung der Regelschleife vergrößert werden kann, bis der geschlossene Regelkreis an die Stabilitätsgrenze gelangt. Ar = 1/|Fo(jw)| Mit dem Faktor meint man wahrschleinlich: Ar*|fo(jw)|=1 und 1 dadurch, da man von der 0dB-Linie ausgeht, richtig? Phasenrand phi_r: Ist jener Wert, um den das Argument von Fo an der Durchtrittsfrequenz wd vergrößert werden kann, bis der geschlossene Regelkreis an die Stabilitätsgrenze gelangt. phi_r=180°+arg(Fo(jw)) Also hier verstehe ich gar nicht, was da genau jetzt vergrößert wird? Gibts, sonst noch was wichtiges dazu zusagen? 1.3 Stabilität von Totzeitsystemen Ist eine Totzeit, jene Zeit, wo das System selber nichts tut? Bei einem System ohne Totzeit ist die Ortskurve genau ein Halbkreis, aber bei nem System mit Totzeit sieht es aus wie so eine Schneckenform. Warum? Auch eine Totzeit bewirkt eine zusätzlich Phasendrehung(aber keine Betragänderung), warum ist das so? Was hat nun eine Totzeit mit Stabilität zu tun? 2. Reglerentwurf nach Bodediagrammverfahren: In dem Bild oben, das sich hochgeladen habe, sehen wir so ein Verfahren. Gegeben ist eine IT1-Strecke. Naja das Ziel ist einfach, dass Fo Integralverhalten(Integrierer im Bild) hat. Wenn man IT1-Strecke und Integrierer zuerst aufzeichnent, kann man mit Hilfe von Addition bzw. Subtraktion den Regler suchen und das ist in diesem Fall PD. Also das ist ja mal ganz einfach. Aber die Frage ist, warum muss Fo Integralverhalten haben? 1. Warum gerade F0? 2. Integralverhalten heißt ja, dass die Regelabweichung verschwindet, aber es sehr lange dauert bis der gewünschte Wert erreicht ist. Das ist ja nicht gut oder? Oder warum wünscht man sich da bei Fo Integralverhalten?
Angehängte Dateien:
-

reglerentwurf.jpg
560 KB
gamdschiee schrieb: > An den Polstellen der Führungsübertragungsfunktion erkennt man doch, ob > ein Regelkreis stabil, instabil oder grenzstabil ist. Richtig? Das auf jeden Fall. Ich gehe davon aus, dass du "asymptotische Stabilität" meinst. Es gibt da noch ein paar andere, aber das ist die Beliebteste. gamdschiee schrieb: > Aber kann man das auch an der Übertragungsfunktion des Reglers oder > einer Regelstrecke alleine auch ausrrechnen? Also wenn nur der Regler > z.b. instabil ist, dann nehme ich an, dass der gesamte Regelkreis > instabil ist, oder? Meistens kann man das so sagen. Ist aber mathematisch nicht immer gegeben. Gründe hierfür sind nichtmodellierte Stellgrößenbeschränkungen. Rechne doch mal zur Übung eine REALISIERBARE Strecke aus, die du bräuchtest, dass ein instabiler Regler ein stabiles Führungsverhalten erzeugt (sone Art Polstellenkompensation)! Und dann wäre spannend zu wissen, wie die Sprungantwort der Stellgröße u ist. Vielleicht hilft Simulink für diese Frage. gamdschiee schrieb: > Doch, warum wird jetzt genau die Ortskurve des offenen Regelkreises(also > ohne Rückkopplung)Fo aufgezeichnet? Warum spielt nur diese eine wichtige > Rolle zur Aussagung der Stabilität eines Regelkreises? Es ist simpler für den Denker im offenen Regelkreis zu denken. Trotzdem möchte man Aussagen über den geschlossenene Kreis treffen. Nyquist hat herausgefunden, dass diese Vereinfachung möglich ist, wenn man das Nyquist-Kriterium anstelle der "linken-Halbebene"-Denke ansetzt. Mithilfe von Nyquist kann man anhand des aussehens von Fo direkt auf das Aussehen von T schließen, ohne rechnen zu müssen. > Und warum ist der Punkt gerade auf 1/0 und ist hier grenzstabil? Die Führungsübertragungsfunktion ist T = Fo/(1+Fo). Rechne das nach, wenn es dir nicht sofort logisch erscheint. Punkte, in denen der Nenner von T null wird, sind kritische Punkte. Das sind mit der Gleichung genau die Punkte, in denen Fo=-1 > Warum ist, wenn die Ortskurve rechts von ihm ist, stabil? > Kann man das "einfach" erklären, oder sind dazu komplizierte Rechnungen > nötig? ganz einfache (und ungenaue) Erklärung, die aber nur die wenigsten Profs in der Uni bringen: Im Polstellendiagramm des geschlossenen Kreises (Führungsübertragung) möchtest du ja alle kritischen Punkte "links der imaginären Achse haben". Die kritischen Punkte von T werden im Nyquist-Diagramm ALLE auf den Punkt -1/0 abgebildet. Jetzt musst du nur noch wissen, wohin die imaginäre Achse aus T im Nyquist-Diagramm abgebildet wird und sicherstellen, dass diese "rechts an den kritischen Punkten vorbei zieht"!! Das zwar mathematisch nicht ganz korrekt, aber hilft bei der Vorstellung: die Imaginäre Achse im T-Polstellendiagramm ist vergleichbar mit der Nyquist-Ortskurve. Besser wird's leider ohne Mathematik nicht :( gamdschiee schrieb: > 1.1.1 Das ganze kann man statt in der Ortskurve auch im Bodediagramm > darstellen du bist völlig auf dem falschen Weg fürchte ich. Das Bode-Diagramm ist die Übertragungsfunktion von Fo, dargestellt in Amplitude und Phasenverschiebung zwischen Ausgangssignal y und Eingangssignal e. Von Nyquist weißt du jetzt, dass die Ortskurve rechts an -1|0 vorbeigehen muss. Das kannst du garantieren, wenn die Ortskurve VOR einer Phasenverschiebung von -180° in den Einheitskreis eintritt. Und der Einheitskreis wird mit dem Betragzeichen beschrieben: |Fo|=1 Am besten mal Kritischen Punkt und Einheitskreis aufzeichnen. Dann verschiedene stabile und instabile Nyquist-Kurven dazu, bis du den -180°-Winkel von der positiven Realachse siehst ;) gamdschiee schrieb: > Amplitudenrand. > Mit dem Faktor meint man wahrschleinlich: Ar*|fo(jw)|=1 und 1 dadurch, > da man von der 0dB-Linie ausgeht, richtig? genau. Die 0dB-Linie ist der Einheitskreis im Nyquist-Diagramm. Die Ortskurve schneidet bei einer bestimmten Frequenz die Realachse. Beim Verstärken mit Ar bläht sich die Ortskurve (betragsmäßig) in alle Richtugnen auf und dieser Schnittpunkt wird irgendwann so weit nach links verschoben bis er auf -1 liegt, was böse ist. Wie weit du verschieben (verstärken) kannst, sagt Ar. gamdschiee schrieb: > Phasenrand. > Also hier verstehe ich gar nicht, was da genau jetzt vergrößert wird? > Gibts, sonst noch was wichtiges dazu zusagen? selbe Argumentation: Du hast einen Winkel (Phasenverschiebung) zwischen negativer Realachse und Verbindungslinie zur Durchtrittsfrequenz. Diesen "Winkel" darfst du auf dein System noch draufpacken, bevor es (also die Ortskurve) im kritischen Punkt liegt. Das geht beispielsweise durch ein Allpasglied, das nur Phasenverschiebung erzeugt. gamdschiee schrieb: > Ist eine Totzeit, jene Zeit, wo das System selber nichts tut? Eine Totzeit ist eine reine Zeitverzögerung, ohne das Signal sonst noch zu beeinflussen. Die einfachste E-TechnikerTotzeit ist ein langes Kabel. Links speist du ein Signal ein und rechts kommt es mit der Zeitverzögerung L/C wieder heraus, ohne sich verändert zu haben. Eine andere Totzeit findest du im Fahrplan der Deutschen Bahn... gamdschiee schrieb: > Bei einem System ohne Totzeit ist die Ortskurve genau ein Halbkreis, > aber bei nem System mit Totzeit sieht es aus wie so eine Schneckenform. > Warum? Nur bei einem PT1-Glied ist die Ortskurve ein Halbkreis. Die Ortskurve kann viele Formen annehmen. Schau dir am besten mal ein paar an. http://www.wolframalpha.com/input/?i=nyquist+{1%2F%28%281%2Bs%29^1%29%2C1%2F%28%281%2Bs%29^2%29%2C1%2F%28%281%2Bs%29^3%29} Im Link siehst du noch die Spiegelungen an der realachse Die Kurve eines Totzeitgliedes habe ich noch nicht gesehen. Aber die Übertragugnsfunktion ist exp(-Ts). Also ist die Ortskurve e(-Tjw). Das müstte meiner Meinung nach einfach nur ein Kreis sein, oder? hast du ne quelle? gamdschiee schrieb: > Auch eine Totzeit bewirkt eine zusätzlich Phasendrehung(aber keine > Betragänderung), warum ist das so? die frage kannst du mittlerweile selbst beantworten, weil du weißt, was eine Totzeit ist. > Was hat nun eine Totzeit mit Stabilität zu tun? Durch die Phasenverschiebung nimmt die Totzeit einfluss auf deinen Phasenrand. Das kann ab einer bestimmten Totzeit negative Auswirkungen haben. gamdschiee schrieb: > Aber die Frage ist, warum muss Fo Integralverhalten haben? Integralverhalten heißt Fo=k/s nach der Laplacetransformation schließt du den Regelkreis, steht da T = k/(k+s) = 1/(1+s/k). 1. Für unendliche Zeit verschwindet der Regelfehler. Man spricht von stationärer Genauigkeit 2. Definiere "sehr lange". Wie schnell das System it, steckt in k. Wenn k groß genug ist, ist das System schnell genug. PD beschleunigt die Strecke ohnehin ziemlich!
:
Bearbeitet durch User
Angehängte Dateien:
-

IMAGE0002.JPG
1,4 MB -

IMAGE0004.png
7,5 KB
{kind=link}
{kind=link}
Ich danke dir! > gamdschiee schrieb: >> 1.1.1 Das ganze kann man statt in der Ortskurve auch im Bodediagramm >> darstellen > > du bist völlig auf dem falschen Weg fürchte ich. > Das Bode-Diagramm ist die Übertragungsfunktion von Fo, dargestellt in > Amplitude und Phasenverschiebung zwischen Ausgangssignal y und > Eingangssignal e. Ich meinte damit, dass man auch Amplitudenrand und Phasenrand auch in einem Bodediagramm von Fo sehen kann. > Von Nyquist weißt du jetzt, dass die Ortskurve rechts an -1|0 > vorbeigehen muss. Das kannst du garantieren, wenn die Ortskurve VOR > einer Phasenverschiebung von -180° in den Einheitskreis eintritt. Aber wie entsteht denn jetzt so eine Phasenverschiebung genau in so einem Regelkreis? Leider habe ich in dem zusammenhang noch nie was von Einheitskreis gehört, was meinst du damit und was soll der denn darstellen in diesem Fall? > Und der Einheitskreis wird mit dem Betragzeichen beschrieben: > |Fo|=1 > Am besten mal Kritischen Punkt und Einheitskreis aufzeichnen. Dann > verschiedene stabile und instabile Nyquist-Kurven dazu, bis du den > -180°-Winkel von der positiven Realachse siehst ;) Hast vllt. ein paar Tipps, wie ich dsa am besten zeichnen kann? Voraussgestzt ich muss auch wissen was nun der Einheitskreis mit dem hier zu tun hat. > gamdschiee schrieb: >> Amplitudenrand. >> Mit dem Faktor meint man wahrschleinlich: Ar*|fo(jw)|=1 und 1 dadurch, >> da man von der 0dB-Linie ausgeht, richtig? > > genau. Die 0dB-Linie ist der Einheitskreis im Nyquist-Diagramm. > Die Ortskurve schneidet bei einer bestimmten Frequenz die Realachse. > Beim Verstärken mit Ar bläht sich die Ortskurve (betragsmäßig) in alle > Richtugnen auf und dieser Schnittpunkt wird irgendwann so weit nach > links verschoben bis er auf -1 liegt, was böse ist. > Wie weit du verschieben (verstärken) kannst, sagt Ar. > Hier wieder dieselbe Frage mit dem Einheitskreis. Was hat er mit dem allem zu tun? > gamdschiee schrieb: >> Ist eine Totzeit, jene Zeit, wo das System selber nichts tut? > > Eine Totzeit ist eine reine Zeitverzögerung, ohne das Signal sonst noch > zu beeinflussen. Die einfachste E-TechnikerTotzeit ist ein langes Kabel. > Links speist du ein Signal ein und rechts kommt es mit der > Zeitverzögerung L/C wieder heraus, ohne sich verändert zu haben. > Eine andere Totzeit findest du im Fahrplan der Deutschen Bahn... Hm naja und wie ich kann ich mir so eine Zeitverzögerung in einen Regelkreis nun vorstellen? Aber ich verstehe nicht, warum wird das Signal nicht verändert? Mit Signal meinst du wohl Sollwert bzw. Istwert oder? > gamdschiee schrieb: >> Bei einem System ohne Totzeit ist die Ortskurve genau ein Halbkreis, >> aber bei nem System mit Totzeit sieht es aus wie so eine Schneckenform. >> Warum? > > Nur bei einem PT1-Glied ist die Ortskurve ein Halbkreis. > > Die Kurve eines Totzeitgliedes habe ich noch nicht gesehen. Aber die > Übertragugnsfunktion ist exp(-Ts). Also ist die Ortskurve e(-Tjw). Das > müstte meiner Meinung nach einfach nur ein Kreis sein, oder? > hast du ne quelle? siehe Bild. > gamdschiee schrieb: >> Auch eine Totzeit bewirkt eine zusätzlich Phasendrehung(aber keine >> Betragänderung), warum ist das so? > die frage kannst du mittlerweile selbst beantworten, weil du weißt, was > eine Totzeit ist. > Hm, kann ich leider nicht, da ich nicht verstehe, was genau bei einer Totzeit passiert im Regelkreis. Ist das nun unabhängig von offener Regleschleife, oder geschlossener? Eine Rückkopplung macht doch auch eine Phasendrehung? Vielleicht kannst du mir das erklären, wie das hier alles zusammenhängt bitte. > gamdschiee schrieb: >> Aber die Frage ist, warum muss Fo Integralverhalten haben? > > Integralverhalten heißt Fo=k/s nach der Laplacetransformation > schließt du den Regelkreis, steht da T = k/(k+s) = 1/(1+s/k). > 1. Für unendliche Zeit verschwindet der Regelfehler. Man spricht von > stationärer Genauigkeit > 2. Definiere "sehr lange". Wie schnell das System it, steckt in k. Wenn > k groß genug ist, ist das System schnell genug. PD beschleunigt die > Strecke ohnehin ziemlich! Folgender Eigenschaften soll doch das Führungsverhalten haben: - Vollständig ausregeln nach gewisser Zeit - möglichst wenig überschwingen - möglichst kurze Ausregelzeit - möglichst kurze Verzugszeit "--> PT1-Charakteristik. Das ist genau dann der Fall, wenn F0 Integralverhalten 1. Ordnung hat" Das haben wir aufgeschrieben. PT1-Charakteristik? Warum? PT1 wird doch nie als Regler verwendet? Ich verstehs nicht. Was ist dann genau der Fall, wenn F0 Integralverhalten 1. Ordnung hat? Nun die letzt Frage: siehe bitte zu dem Regelungsentwurfbild. Die Aufgabe war es einen PID-Regler mit Ausregelzeit(Taus) von 0.5s zu realisieren bei einer PT2-Strecke. Ich hoffe auf dem Bild kann man einigermaßen gut erkennen, was da gemacht wird. Wenn du dir die rechte Hälfte des Bildes anschaust, da ist ja die Sprungantwort des PT1 aufgezeichnet. Ich versteh nicht was diese Zeit Tn darstellen soll, was soll die uns weiterhelfen? Und warum ist die ganau da, wo die Tangente die gerade Linie schneidet? Taus~5*Tn --> Aus welchen Überlegungen hat man das herausgefunden? Und Tw ist dann einfach 0.5/5, also im Prinzip haben wir einfach die Formel umgeformt und statt Tn Tw genommen. Naja und dann TW=To? Ich verstehe denn Vorgang nicht, wie man von der Ausregelzeit Taus zur Zeitkonstante To kommt, wo dann der Integrator durchgeht(durchtrittsfrequenz 1/0.1 = 10). Ta und Tb bzw. diese "Eckpunkte" muss man ja immer herausfinden. Gibt es da eine art "Kochrezept" wie da vorgegangen wird, oder muss ich einfach immer schauen, wie man die Zeitkonstanten der vorgebenen Strechen berechnet? Danke im voraus, deine vorigen Antworten haben mir eigentlich schon sehr geholfen, nur es sind noch ein paar Lücken zu füllen. mfg gamdschiee
PS: ich glaube, wenn ihr das Bild herunterladet und dann hineinzoomt, kann man es gut lesen. Sorry für die etwas schlechte Qualität.
gamdschiee schrieb: > Aber kann man das auch an der Übertragungsfunktion des Reglers oder > einer Regelstrecke alleine auch ausrrechnen? Also wenn nur der Regler > z.b. instabil ist, dann nehme ich an, dass der gesamte Regelkreis > instabil ist, oder? Wenn das so wäre, dann könnte man kein Segway bauen. Das Segway alleine ohne Regelung ist immer eine instabile Strecke. Wenn du dich auf das ausgeschaltete Teil stellst wird es immer umfallen, ist also instabil. Manchmal hilft es sich etwas an real existierenden Objekten vorzustellen und nicht nur in der Mathematik.
Ich glaube, dass mit den Einheitskreis, ist mir jetzt eig. klar geworden. Aber folgende Fragen sind ncoh offen - kann die mir einer bitte beantworten? > gamdschiee schrieb: >> Ist eine Totzeit, jene Zeit, wo das System selber nichts tut? > > Eine Totzeit ist eine reine Zeitverzögerung, ohne das Signal sonst noch > zu beeinflussen. Die einfachste E-TechnikerTotzeit ist ein langes Kabel. > Links speist du ein Signal ein und rechts kommt es mit der > Zeitverzögerung L/C wieder heraus, ohne sich verändert zu haben. > Eine andere Totzeit findest du im Fahrplan der Deutschen Bahn... Hm naja und wie ich kann ich mir so eine Zeitverzögerung in einen Regelkreis nun vorstellen? Aber ich verstehe nicht, warum wird das Signal nicht verändert? Mit Signal meinst du wohl Sollwert bzw. Istwert oder? > gamdschiee schrieb: >> Bei einem System ohne Totzeit ist die Ortskurve genau ein Halbkreis, >> aber bei nem System mit Totzeit sieht es aus wie so eine Schneckenform. >> Warum? > > Nur bei einem PT1-Glied ist die Ortskurve ein Halbkreis. > > Die Kurve eines Totzeitgliedes habe ich noch nicht gesehen. Aber die > Übertragugnsfunktion ist exp(-Ts). Also ist die Ortskurve e(-Tjw). Das > müstte meiner Meinung nach einfach nur ein Kreis sein, oder? > hast du ne quelle? siehe Bild. > gamdschiee schrieb: >> Auch eine Totzeit bewirkt eine zusätzlich Phasendrehung(aber keine >> Betragänderung), warum ist das so? > die frage kannst du mittlerweile selbst beantworten, weil du weißt, was > eine Totzeit ist. > Hm, kann ich leider nicht, da ich nicht verstehe, was genau bei einer Totzeit passiert im Regelkreis. Ist das nun unabhängig von offener Regleschleife, oder geschlossener? Eine Rückkopplung macht doch auch eine Phasendrehung? Vielleicht kannst du mir das erklären, wie das hier alles zusammenhängt bitte. > gamdschiee schrieb: >> Aber die Frage ist, warum muss Fo Integralverhalten haben? > > Integralverhalten heißt Fo=k/s nach der Laplacetransformation > schließt du den Regelkreis, steht da T = k/(k+s) = 1/(1+s/k). > 1. Für unendliche Zeit verschwindet der Regelfehler. Man spricht von > stationärer Genauigkeit > 2. Definiere "sehr lange". Wie schnell das System it, steckt in k. Wenn > k groß genug ist, ist das System schnell genug. PD beschleunigt die > Strecke ohnehin ziemlich! Folgender Eigenschaften soll doch das Führungsverhalten haben: - Vollständig ausregeln nach gewisser Zeit - möglichst wenig überschwingen - möglichst kurze Ausregelzeit - möglichst kurze Verzugszeit "--> PT1-Charakteristik. Das ist genau dann der Fall, wenn F0 Integralverhalten 1. Ordnung hat" Das haben wir aufgeschrieben. PT1-Charakteristik? Warum? PT1 wird doch nie als Regler verwendet? Ich verstehs nicht. Was ist dann genau der Fall, wenn F0 Integralverhalten 1. Ordnung hat? Nun die letzt Frage: siehe bitte zu dem Regelungsentwurfbild. Die Aufgabe war es einen PID-Regler mit Ausregelzeit(Taus) von 0.5s zu realisieren bei einer PT2-Strecke. Ich hoffe auf dem Bild kann man einigermaßen gut erkennen, was da gemacht wird. Wenn du dir die rechte Hälfte des Bildes anschaust, da ist ja die Sprungantwort des PT1 aufgezeichnet. Ich versteh nicht was diese Zeit Tn darstellen soll, was soll die uns weiterhelfen? Und warum ist die ganau da, wo die Tangente die gerade Linie schneidet? Taus~5*Tn --> Aus welchen Überlegungen hat man das herausgefunden? Und Tw ist dann einfach 0.5/5, also im Prinzip haben wir einfach die Formel umgeformt und statt Tn Tw genommen. Naja und dann TW=To? Ich verstehe denn Vorgang nicht, wie man von der Ausregelzeit Taus zur Zeitkonstante To kommt, wo dann der Integrator durchgeht(durchtrittsfrequenz 1/0.1 = 10). Ta und Tb bzw. diese "Eckpunkte" muss man ja immer herausfinden. Gibt es da eine art "Kochrezept" wie da vorgegangen wird, oder muss ich einfach immer schauen, wie man die Zeitkonstanten der vorgebenen Strechen berechnet? Danke im voraus, deine vorigen Antworten haben mir eigentlich schon sehr geholfen, nur es sind noch ein paar Lücken zu füllen. mfg gamdschiee
Kann sich bitte jemand meine Fragen anschauen?
gamdschiee schrieb: > Hm, kann ich leider nicht, da ich nicht verstehe, was genau bei einer > Totzeit passiert im Regelkreis. Totzeit bedeutet einfach, dass der zu regelnde Prozess verspätet auf die Regelung reagiert. Also z.B. bei einem Wasserkocher fällt die Temperatur, der Regler dreht den Strom hoch, aber es dauert, bis die Wärme am Temperaturfühler ankommt. Du solltest die Regelungstechnik nicht im s-Bereich betrachten, der ist nämlich nur ein Hilfskonstrukt, sondern im Zeit-Bereich. Da ist die Totzeit einfach eine Verschiebung: y(t)=u(t-Tt) Daraus wird dann im s-Bereich: e^(-s*Tt) Inzwischen werden Regler meist im Zeitbereich entworfen, da die dann direkt als C-Programm für einen Mikrocontroller genommen werden können. Regler im s-Bereich waren früher für die Analogelektronik mit OpAmps nötig.
gamdschiee schrieb: > Folgender Eigenschaften soll doch das Führungsverhalten haben: > - Vollständig ausregeln nach gewisser Zeit > - möglichst wenig überschwingen > - möglichst kurze Ausregelzeit > - möglichst kurze Verzugszeit > > "--> PT1-Charakteristik. Das ist genau dann der Fall, wenn F0 > Integralverhalten 1. Ordnung hat" Kommt auf das Streckenverhalten an. > PT1-Charakteristik? Warum? > PT1 wird doch nie als Regler verwendet? Ich verstehs nicht. > > Was ist dann genau der Fall, wenn F0 Integralverhalten 1. Ordnung hat? Integralverhalten bedeutet das Eingangssignal (in dem Fall des Reglers) zu integrieren. Das Eingangssignal des geschlossenen Regelkreises ist die Regeldifferenz, also die Differenz zwischen Sollwert und Istwert. Wie jetzt unzweifelhaft nachvollzogen werden kann, wird solange integriert bis die Regeldifferenz null ist. Dann ist der Eingang des Reglers null wodurch weder D- noch P-Anteil mehr anspringt. Der Ausgang des Reglers entspricht dann nur noch dem Wert des I-Anteils. Dieser Wert ist genau jener der den Sollwert am Streckenausgang erzeugt. > Nun die letzt Frage: > siehe bitte zu dem Regelungsentwurfbild. > > Ich versteh nicht was diese Zeit Tn darstellen soll, was soll die uns > weiterhelfen? Und warum ist die ganau da, wo die Tangente die gerade > Linie schneidet? Die Zeit Tn heißt Zeitkonstante. Wenn du die analytische Lösung eines PT1 betrachtest gibt es nur wenige Parameter die die Lösung vollständig beschreiben.(hier die Sprungantwort in analytischer Form http://de.wikipedia.org/wiki/PT1-Glied#Sprungantwort) Der Parameter K ist der stationäre Endwert und wenig interessant für das Übergangsverhalten. Also bleibt nur T. Und du sollst die Zeitkonstante durch die Regelung so festlegen das eine Ausregelzeit von 5 mal Tn herauskommt.Im Bodediagramm siehst du gleich warum das ein nützlicher Hinweis ist. > Taus~5*Tn --> Aus welchen Überlegungen hat man das herausgefunden? Und > Tw ist dann einfach 0.5/5, also im Prinzip haben wir einfach die Formel > umgeformt und statt Tn Tw genommen. Naja und dann TW=To? > > Ich verstehe denn Vorgang nicht, wie man von der Ausregelzeit Taus zur > Zeitkonstante To kommt, wo dann der Integrator > durchgeht(durchtrittsfrequenz 1/0.1 = 10). > > Ta und Tb bzw. diese "Eckpunkte" muss man ja immer herausfinden. Gibt es > da eine art "Kochrezept" wie da vorgegangen wird, oder muss ich einfach > immer schauen, wie man die Zeitkonstanten der vorgebenen Strechen > berechnet? > > Danke im voraus, deine vorigen Antworten haben mir eigentlich schon sehr > geholfen, nur es sind noch ein paar Lücken zu füllen. > > mfg > > gamdschiee Für den Reglerentwurf im Frequenzbereich(also Bodediagramm) gibt es an sich schon einfache Kochregeln. Die Wichtigste ist, dass du die Kennlinie für den Regler und der Strecke einfach addieren kannst. Und damit hast du schon alles zusammen. Ein Integrator in der offenen Kette ist ein PT1 im geschlossenen Kreis. Die Integrationszeitkonstante des Integrators ist der Zeitkonstante des PT1 gleich, also in deinem Fall Tn.(Also von offener Kette auf geschlossenen Kreis) Das heißt 1. Dein Zielverhalten im offenen Kreis im Bodediagramm ist ein Integrator(abfallende Linie) die Ihren Schnittpunkt bei Tn haben soll. 2. Dein derzeitiges Verhalten ist die gegebene PT2-Strecke 3. Also rechne Zielkennlinie minus derzeitiges Verhalten und voila du hast deine Reglerkennlinie. Aus der liest du die Zeitkonstanten an den Ecken ab und die Verstärkung und schon hast du deinen Regler eingestellt.(Vielleicht noch etwas umrechnen, je nach Reglerstruktur) 4. Wenn du den Regelkreis schließt kommt dein Wunschverhalten raus(zumindest theoretisch). Gruß Thomas
Hm ok danke. 1. Thema: Warum kann man die Sprungantwort von so einem reinem PT1-Glied als "Ausregelvorgang" betrachten? Das ist doch nur ein PT1, wo halt ein Sprung reingeschickt wird und die Sprungantwort sieht halt so aus, wie oben gezeigt wird. Oder zeigt das einfach den perfektesten Fall? Also einfach ohne Regler und ohne Rückkopplung etc., da man keine Störungen und sonstige Einflüsse annimmt? Oder wie soll ich das am besten betrachten? Aber dann verstehe ich folgendes auch nicht: "Ein Integrator in der offenen Kette ist ein PT1 im geschlossenen Kreis." Warum ist das so? In diesen Veranschaulichungen gibt es da Regler auch, oder ist das nur ein PT1-Element bzw. I-Element? Ich habe leider gerade keine wirkliche Ahnung, wie ich mir das vorstellen soll. Aber warum rechnet man da mit dem offenem Regelkreis Fo(jw)=Fr(Regler)*Fs(Regelstrecke) herum? 2. Thema: Ok, nach ca. 5*Tn, sieht man bei der Sprungantwort, des PT1-Gliedes, dass dieser seinen Endwert erreicht hat, also "ausgeregelt" hat. Aber warum muss dann genau der Integrator durch den Punkt Tn gehen? Was bewirkt man genau dadurch? Was passiert da? 3. Thema: Siehst du auf meinem Bild, die Zeitpunkte Ta und Tb? Diese muss man sich doch auch ausrechnen. Also allgemein: Man muss sich doch auch die Zeitpunkte von den einzelnen Eckpunkten, der Strecke bzw. des Reglers ausrechnen, oder? Zeichnen geht ja mal einfach, aber dann die richtigen Werte hinschreiben, naja.... Wie berechne ich mir denn diese Zeitpunkte, an den Eckpunkten? Was muss denn da eigentlch immer gegeben sein, dass ich diese ausrechnen kann? Wenn eine Regelstreche vorgeben ist, werden ja eig. auch immer die Zeitpunkte bzw. Eckpunkte vorgegeben, oder? Ich hoffe ihr könnte mir helfen! Danke!
Kann mir bitte jemand einer weiterhelfen? Ich möchte das verstehen. Ja, es ist viel Text, aber das sind doch nciht nur Frage, ich versuche ja in dem Text selbst meine Antworten zu finden. Bitte kann sich jemand den Text durchlesen und mir weiterhelfen. Würde mich freuen. Danke :).
gamdschiee schrieb: > Das ist doch nur ein PT1, wo halt ein Sprung reingeschickt wird und die > Sprungantwort sieht halt so aus, wie oben gezeigt wird. Oder zeigt das > einfach den perfektesten Fall? Also einfach ohne Regler und ohne > Rückkopplung etc., da man keine Störungen und sonstige Einflüsse > annimmt? > > Oder wie soll ich das am besten betrachten? > > Aber dann verstehe ich folgendes auch nicht: "Ein Integrator in der > offenen Kette ist ein PT1 im geschlossenen Kreis." Warum ist das so? In > diesen Veranschaulichungen gibt es da Regler auch, oder ist das nur ein > PT1-Element bzw. I-Element? Ich habe leider gerade keine wirkliche > Ahnung, wie ich mir das vorstellen soll. > > Aber warum rechnet man da mit dem offenem Regelkreis > Fo(jw)=Fr(Regler)*Fs(Regelstrecke) herum? der integrator ist nicht in der offenen Kette. Er ist die offene Kette: Fo(s) = k/s Damit kannst du dir die Übertragungsfunktion der geschlossenen Kette als PT1-Glied ausrechnen. Genauer als PT1-Glied mit Verstärkung 1. T = Fo/(1+Fo) Beispiel: Deine Strecke ist eine asymmetrisch gelagerte Wippe, die du gerne in einem bestimmten Position stehen hättest hättest (wo sie von sich aus nicht bleibt, da eine Seite schwerer ist). du stellst die Position an der linken Seite ein (Stellgröße u) und bekommst die Position an der rechen Seite heraus (y = -3u), wobei ich annehme, dass in der Waagerechten y=0. also k=-3 Wenn du k genau kennst, kannst du u = w/k einstellen, ohne eine Rückführung und einen Regler zu benötigen. Da k aber nicht exakt bekannt ist, verbaust du einen I-Regler R=1/s und erhälst NACH SCHLIESSEN DES REGELKREISES das gewünschte PT1-Verhalten der gesamten Kombination. y antwortet also auf die Sollgröße w mit einer PT1-Verzögerung gamdschiee schrieb: > Ok, nach ca. 5*Tn, sieht man bei der Sprungantwort, des PT1-Gliedes, > dass dieser seinen Endwert erreicht hat, also "ausgeregelt" hat. > > Aber warum muss dann genau der Integrator durch den Punkt Tn gehen? Was > bewirkt man genau dadurch? Was passiert da? du beobachtest einen exponentiellen Abfall des Fehlers. "Ausgeregelt" ist das System nie, nur sind die Änderungen nicht mehr wahrnehmbar nach Tn ist der Fehler auf e^(-1) seines Anfangswertes abgefallen. gamdschiee schrieb: > Siehst du auf meinem Bild, die Zeitpunkte Ta und Tb? Diese muss man sich > doch auch ausrechnen. du siehts nach rechts eine Frequenz angetragen. Also sind die "Rechtswerte" entweder Frequenzen f, Kreisfrequenzen omega oder Perioden T. Aber keine Zeitpunkte. T=1/f
rava schrieb: > du beobachtest einen exponentiellen Abfall des Fehlers. "Ausgeregelt" > ist das System nie, nur sind die Änderungen nicht mehr wahrnehmbar > nach Tn ist der Fehler auf e^(-1) seines Anfangswertes abgefallen. > Hm, aber warum geht ein Integrator genau durch die Frequenz 1/Tn, also warum nimmt man gerade Fw(jw)=1/(1+jwTn). Naja weil ja Tn die Zeitkonstante von dem Integrator nun mal ist und der fährt halt durch 1/Tn, aber ich kann es mir noch nicht recht begründen, warum der gerade dadurch fährt(beim Bodediagramm). > du siehts nach rechts eine Frequenz angetragen. Also sind die > "Rechtswerte" entweder Frequenzen f, Kreisfrequenzen omega oder Perioden > T. Aber keine Zeitpunkte. > T=1/f Sorry ich meinte damit eh die Kreisfrequenz w(omega), nur indirekt. Trotzdem muss ich doch diese Knickpunkte wissen, also Ta und Tb, um dann omaga zu berechnen --> 1/Ta bzw. 1/Tb. Glaubst du die Eckpunkte, sind immer vorgegeben bei der Strecke? Müssen ja fast vorgegeben werden, sonst kann ich ja nicht die Strecke genau einzeichnen oder?
F. K. schrieb: > Hm, aber warum geht ein Integrator genau durch die Frequenz 1/Tn, also > warum nimmt man gerade Fw(jw)=1/(1+jwTn). > > Naja weil ja Tn die Zeitkonstante von dem Integrator nun mal ist und der > fährt halt durch 1/Tn, aber ich kann es mir noch nicht recht begründen, > warum der gerade dadurch fährt(beim Bodediagramm). in meinem Beispiel habe ich einen reinen Integrator beschrieben. Die Zeitkonstante T des PT1-Gliedes ist 1/k (das k kam aus der Strecke). Wenn der Integrator im Regler noch einen eigenen Verstärkungsfaktor (oder eine Zeitkonstante) hat, dann kommt die eben auchnoch mit dazu. Aber das kriegst du ja mathematisch hin. Zur Vorstellung des reinen Integrators und des Bodediagramms: gib eine Sinusschwingung sin(t) in einen 1/s-Integrator und er wird mit -cos(t) antworten. Die Verstärkung ist also 1. gib eine Sinusschwingung sin(0.1 t) in einen 1/s-Integrator und er wird mit -10cos(0.1 t) antworten. Die Verstärkung ist also 10. So kommst du auf das Slope, also die negative Steigung im Bodediagramm. Was passiert jetzt, wenn du die Signale in einen 10/s-Integrator gibst oder in einen 1/10s-Integrator? Das sind beides Integratoren mit Zeitkonstante (oder Verstärkung) ungleich 1. Bei einem reinen Integrator sind Zeitkonstante und Verstärkung de facto nur eine Größe. Die Periode Tn ist genau da, wo das ganze Ding die Verstärkung 1 hat. Das ist die 0dB-Line im Bode. Hat nichts mit dem Schließen des Regelkreises zu tun und dem PT1-Verhalten. Das Bodediagramm zeigt immer den offenen Kreis. F. K. schrieb: > Sorry ich meinte damit eh die Kreisfrequenz w(omega), nur indirekt. > Trotzdem muss ich doch diese Knickpunkte wissen, also Ta und Tb, um dann > omaga zu berechnen --> 1/Ta bzw. 1/Tb. > > Glaubst du die Eckpunkte, sind immer vorgegeben bei der Strecke? Müssen > ja fast vorgegeben werden, sonst kann ich ja nicht die Strecke genau > einzeichnen oder? Die Strecke besteht aus Geradenstücken. Für jedes Stückchen brauchst du drei Angaben, um sie einzeichnen zu können: 1. Die Steigung: ist meistens durch das Übertragungsglied gegeben, das dem Geradenstückchen entspricht 2. eine Frequenz und 3. die dazugehörige Verstärkung es kann schon passieren, dass du von anderen Angaben mithilfe der Steigung umrechnen musst. Hausaufgabenfragen beschäftigen mich allerdings weniger ;) wenn du noch Verständnisfragen hast, melde dich!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.