Hallo zusammen,
folgende Ausgangssituation:
Es geht beim aktuellen Projekt um ein Gerät, bei dem 8 Schrittmotoren
(Nanotec, 2 A je Phase) unabhängig voneinander angesteuert werden
sollen. Als Mikrocontroller kommt ein Arduino Mega 2560 zum Einsatz.
Nun verliefen alle Test am Breadboard mit maximal zwei Motoren äußerst
zufriedenstellend (Verkabelung gemäß
http://www.pololu.com/picture/view/0J3360 | Spannungsversorgung Motor
12V | Als Kondensator kam ein 470uF Elko mit Spannungsfestigkeit bis 35V
zum Einsatz).
Nun bin ich zum "großen" Aufbau mit allen 8 Motoren übergegangen,
vermute, dass hier jedoch der Teufel irgendwo im Detail steckt, denn
leider habe ich mir zwischenzeitlich bereits zwei Treiber zerschossen
(einer ging regelrecht in Flammen auf). Was habe ich also beim "großen"
Aufbau anders gemacht? Kurz zusammengefasst mögliche Einflussfaktoren:
- 24V Netzteil statt 12V (alle 8 Pololus parallel angeschlossen).
- 1.000uF Elkos mit 48 V Spannungsfestigkeit parallel zur Motorspannung
nah an jeden Schrittmotortreiber gelötet (d.h. insgesamt 8x 1.000uF).
- Bedingt durch das Maschinendesign leider lange Motorzuleitungen
notwendig. Maximal ca. 2 Meter, recht geringer Querschnitt von 0,4 mm ²
Nun stellt sich folgendes Verhalten beim Einschalten ein:
- Stromversorgung für Motor ein, Arduino-Board ein: Motoren ruckeln
teilweise (auch wenn sie überhaupt nicht durch das Programm angesteuert
werden, also dauerhaft LOW am jeweiligen Pin anliegt) beim Einschalten,
Pololus werden schnell sehr heiß. Werden die Motoren durch ein Programm
angesteuert, so ruckeln sie nur heftig.
- Stromversorgung für Motor ein, Arduino Board aus: Motoren laufen
logischerweise nicht, Motoren ruckeln nicht, Pololus behalten
Raumtemperatur
Die Strombegrenzung an den Pololus ist eingestellt (an einem gemessen,
alle anderen Einstellpotis optisch auf den gleichen Wert eingestellt).
Ich stehe gerade ein bisschen auf dem Schlauch (gewiss auch durch
unzureichende Kenntnis der Materie), wie ich dem Problem am ehesten auf
die Schliche kommen kann. Daher bin ich für jeden Tipp dankbar, wie ich
am besten zur Fehlersuche und Eliminierung vorgehen sollte! Ich habe
zwar den ganzen Abend mit Recherche und dem Lesen von Beiträgen
verbracht, die Verwirrung ist aber eher noch größer.
Über Eure Hilfe würde ich mich freuen!
Jonas
Verkabelungsproblem. Masseproblem??
Haben alle die gleiche Masse?
Hast du einen Oszi?
Die Pegel am Arduino mal überprüfen.
Kannst dir ein Soundkarten-Oszi(Google) bauen, um zu sehen was auf
Step/Dir so abgeht.
Mal als Tipp ins blaue. Die 2A sind ja das Maximum für die Motortreiber
und nur mit Zusatzkühlung zulässig (hast du eine?)
Durch die 24V ist der Stromanstieg in der Motorwicklung doppelt so steil
wie bei 12V. Dadurch steigt die schalthäufigkeit der Stromregelung und
dadurch die Umschaltverluste. Der Treiber ist recht klein und hat
dadurch nicht genug Fläche um die Wärme abzugeben. Irgend wann ist der
Die im Chip so heiß dass die Endstufe durchbrennt und sich die ganze
Energie aus den Elkos in diesen chip entlädt. Das Feuerwerk ist die
logische Konsequenz.
Versuche die Treiber so gut wie möglich zu kühlen. Vll. mit
Wärmeleitpads zwischen 2 Kühlkörper klemmen und den ganzen Spaß
zwangsbelüften.
EDIT: Sind die Elkos Low ESR Typen?
Das würde
Oliver P. schrieb:> Versuche die Treiber so gut wie möglich zu kühlen.
Das sagt selbst die Beschreibung zum Treiberboard: "It operates from 8 –
35 V and can deliver up to approximately 1 A per phase without a heat
sink or forced air flow (it is rated for 2 A per coil with sufficient
additional cooling)."
2m lange leitungen für step / dir ? eventuell bekommst du da störungen
rein daher eventuell das zittern. treiber näher an den prozessor und
schrittmotorleitungen länger ist aufjedenfall besser würd ich sagen
Dein Ruckeln ist etwas ungenau beschrieben.
Wenn ich mir die Platinchen ansehe, wo der A4988(A4983?) völlig
ungekühlt aufgelötet ist, kann das Ruckeln durchaus vom
Übertemperaturschutz kommen. Die Treiber werden zu heiß und werden
abgeschaltet. Dann kühlen sie ab und mit einsetzendem Ruhestrom ruckeln
sie dann.
Den Platinchen fehlen offensichtlich auch die Schutzdioden am Ausgang.
Das kann zum Ausfall der Treiber führen, wie Du es beschrieben hast.
Optimisten interpretieren das Datenblatt dahingehend, dass man diese
Dioden nicht braucht. Ich bin Pessimist :-)
Hallo zusammen,
besten Dank für die schnellen Rückmeldungen.
Vorab vielleicht noch ein paar weitere Informationen zum Aufbau der
Schaltung:
- Den Aufbau der Schaltung habe ich mit Lochrasterplatinen und Draht
durchgeführt
- Die Pololus, das Arduinoboard und eine Leadschine DM556 Endstufe für
einen weiteren, deutlich größeren Schrittmotor sind in einem
Kunststoffgehäuse mit Zwangsbelüftung (2 große Gehäuselüfter)
untergebracht
- Alle Pololus sind mit Kühlkörpern ausgestattet
- Die Step/Direction Verkabelung ist relativ kurz ausgeführt (maximal 20
cm Litze)
- Die Motorleitungen (Pololu --> Motor) sind, wie bereits geschrieben,
relativ lang (ca. 2m)
- Ich habe zwischenzeitlich mit einem 12 V Netzteil Versuche gemacht,
leider das gleiche (negative) Ergebnis.
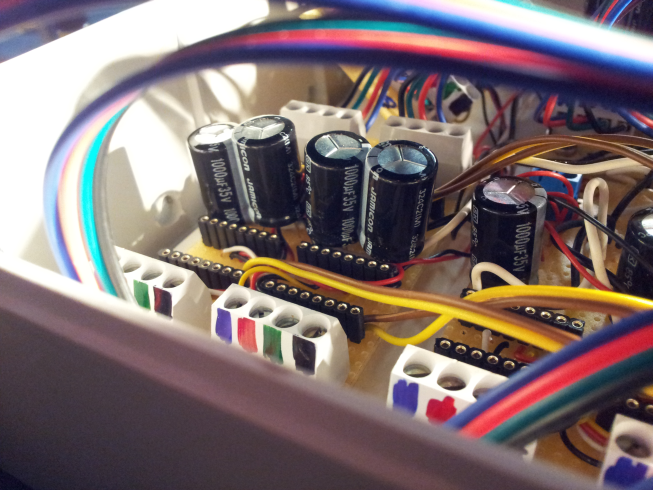
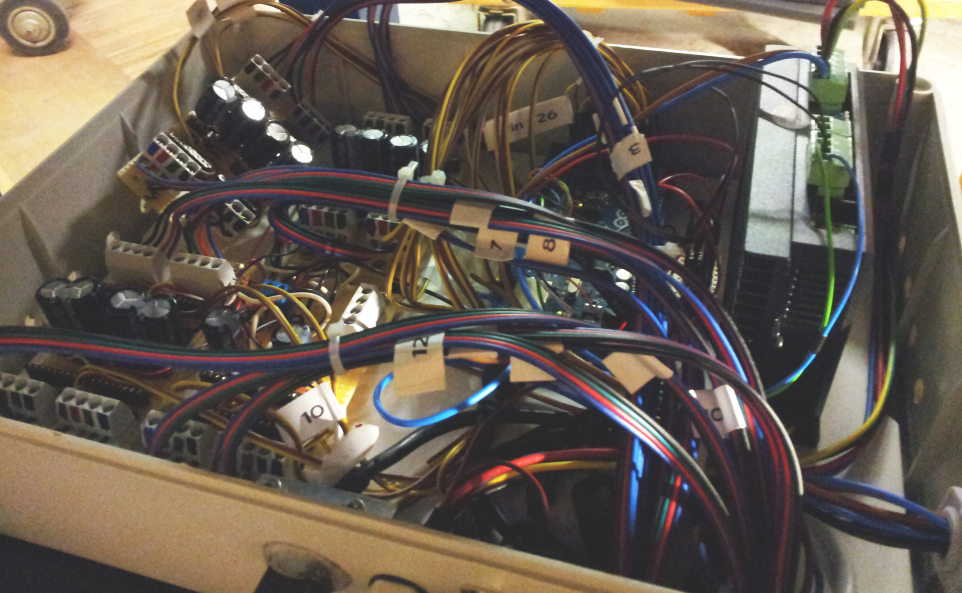
- Anbei ein Foto (Gehaeuse.png), aus dem die Verkabelung ersichtlich
wird. gelb/braun sind die Step/Direction Leitungen, schw./blau/rot/grün
die Motorleitungen
- Die Motoren ziehen im bipolaren Betrieb laut Datenblatt übrigens
maximal 1,41A
- Das beschriebene Ruckeln ist genau genommen eher ein Vibrieren. Die
Motoren drehen sich nicht, sondern die Welle vibriert stark.
- Der an der DM556 angeschlossene Motor macht übrigens genau, was man
ihm sagt :-)
Zu einigen Anmerkungen/Antworten von Euch kann ich direkt eine Antwort
geben, zu einigen habe ich noch eine Frage:
1
Autor: Fräse (Gast)
2
Datum: 04.11.2013 22:44
3
4
Verkabelungsproblem. Masseproblem??
5
Haben alle die gleiche Masse?
6
Hast du einen Oszi?
7
Die Pegel am Arduino mal überprüfen.
8
Kannst dir ein Soundkarten-Oszi(Google) bauen, um zu sehen was auf
9
Step/Dir so abgeht.
Alle Pololus mit der Motorstromversorgung an der gleichen Masse. Das
Arduinoboard hängt an einem anderen Netzteil, die Versorgung der Pololus
mit der 5V Steuerspannung hängt jeweils an der Arduino-Masse. Die
Verkabelung ist grundsätzlich wie im ursprünglichen Artikel abgebildeten
Link erfolgt. Ein Oszilloskop habe ich leider nicht, die Pegel am
Arduino würden mich auch interessieren! Ggf. tobt über die Step-Leitung
irgendein "Feuerwerk", was das Ruckeln und die schnelle Erwärmung
verursachen könnte. Ich werde mir das mit dem Soundkarten-Oszi mal
anschauen.
Frage: Sollte ich die Step/Dir Leitungen grundsätzlich irgendwie
gegenüber anderen Spannungsführenden Leitungen schirmen?
1
Autor: Oliver P. (mace_de)
2
Datum: 04.11.2013 22:56
3
4
Mal als Tipp ins blaue. Die 2A sind ja das Maximum für die Motortreiber
5
und nur mit Zusatzkühlung zulässig (hast du eine?)
6
Durch die 24V ist der Stromanstieg in der Motorwicklung doppelt so steil
7
wie bei 12V. Dadurch steigt die schalthäufigkeit der Stromregelung und
8
dadurch die Umschaltverluste. Der Treiber ist recht klein und hat
9
dadurch nicht genug Fläche um die Wärme abzugeben. Irgend wann ist der
10
Die im Chip so heiß dass die Endstufe durchbrennt und sich die ganze
11
Energie aus den Elkos in diesen chip entlädt. Das Feuerwerk ist die
12
logische Konsequenz.
13
Versuche die Treiber so gut wie möglich zu kühlen. Vll. mit
14
Wärmeleitpads zwischen 2 Kühlkörper klemmen und den ganzen Spaß
15
zwangsbelüften.
16
EDIT: Sind die Elkos Low ESR Typen?
Ja, die Pololus sind mit Kühlkörpern ausgestattet und sind unter einem
Lüfter montiert. In der Breadboard-Schaltung war die Temperatur nie das
Problem. Der Temperaturanstieg ist übrigens sehr schnell. Die Pololus
heizen sich innerhalb weniger Sekunden auf >50°C auf. Da habe ich dann
immer abgeschaltet.
Die Elkos sind Standard-Elkos vom Elektronik-Markt hier vor Ort. Siehe
auch angehängte Datei. Kann ich per Widerstandsmessung mit einem
Multimeter über den Gesamtwiderstand des Elkos darauf schließen, ob es
sich um einen Low-ESR handelt? So wie ich es gerade im Elektronik
Kompendium gelesen habe, wären Low-ESR Kondensatoren besser geeignet
bzw. hätten einen größeren Wirkungsgrad, oder wie ist das zu verstehen?
1
Autor: pot (Gast)
2
Datum: 05.11.2013 00:43
3
4
Strom bei 12V Betrieb eingestellt...und nun mit 24V bombardiert ?
5
0,4 mmm ? zu wenig.
6
Kann Dein Netzteil ueberhaupt den noetigen Strom liefern ?
Die Einstellungssache ist leider wie von Dir beschrieben :-( Habe
allerdings die Spannungsquelle testweise getauscht auf eine etwas
leistungsschwächere 12 V Quelle (und entsprechend erst einmal nicht alle
Motoren rangehängt), das Problem tritt trotzdem auf. Die Netzteile sind
mit ausreichend Sicherheit dimensioniert.
Den Leitungsquerschnitt werde ich testweise mal erhöhen.
1
Autor: Sven (Gast)
2
Datum: 05.11.2013 04:43
3
4
2m lange leitungen für step / dir ? eventuell bekommst du da störungen
5
rein daher eventuell das zittern. treiber näher an den prozessor und
6
schrittmotorleitungen länger ist aufjedenfall besser würd ich sagen
Wie ich bereits oben in dieser Antwort geschrieben habe, sind die
Step/Direction Leitungen maximal 0,2 m lang. Aber sollte ich die
Leitungen ggf. gegen Störungen Abschirmen, wenn ja wie? Umwickeln mit
Masseleitung?
1
Autor: m.n. (Gast)
2
Datum: 05.11.2013 08:51
3
4
Dein Ruckeln ist etwas ungenau beschrieben.
5
Wenn ich mir die Platinchen ansehe, wo der A4988(A4983?) völlig
6
ungekühlt aufgelötet ist, kann das Ruckeln durchaus vom
7
Übertemperaturschutz kommen. Die Treiber werden zu heiß und werden
8
abgeschaltet. Dann kühlen sie ab und mit einsetzendem Ruhestrom ruckeln
9
sie dann.
10
11
Den Platinchen fehlen offensichtlich auch die Schutzdioden am Ausgang.
12
Das kann zum Ausfall der Treiber führen, wie Du es beschrieben hast.
13
Optimisten interpretieren das Datenblatt dahingehend, dass man diese
14
Dioden nicht braucht. Ich bin Pessimist :-)
Das klingt logisch. Mit den Schutzdioden würde es mir grundsätzlich auch
besser gefallen, allerdings ist der Aufwand der Integration bei der
Anzahl an Motoren doch nicht unerheblich :-)
Das Ruckeln ist um genau zu sein ein Vibrieren des Motors. Die Welle
dreht garnicht (also kein Schrittverlust), sondern vibriert nur.
Ich werde mich heute mal daran machen, einige Sachen auszuprobieren:
1.) Alle Pololus am Breadboard testen, ob die überhaupt noch voll
funktionsfähig sind. Ggf. habe ich, durch was auch immer, auch die
optisch noch intakten Pololus bereits zerstört...
2.) Dickere Zuleitungen an den Motor hängen
3.) Alle Pololus bis auf einen abklemmen --> Nach und nach weitere dazu.
Habt ihr noch Ideen, was ich überprüfen könnte/sollte?
Sind euch grundsätzlich (kostengünstige) Alternativen zum Pololu
bekannt, die hier ggf. besser funktionieren sollten?
Jonas schrieb:> Ich werde mich heute mal daran machen, einige Sachen auszuprobieren:
Da Du keine Scope hast, lege am steuernden µC in die Step-Leitungen 1k
Widerstände in Reihe. Dann schließe das STEP-Signal an den P-Board
Eingängen einfach kurz.
Ist dann das Vibrieren verschwunden?
So, nun habe ich mich mal angemeldet, um nicht immer als Gast schreiben
zu müssen. Allerdings mit anderem Nutzernamen, da Jonas schon vergeben
war :-)
m.n. schrieb:> Da Du keine Scope hast, lege am steuernden µC in die Step-Leitungen 1k> Widerstände in Reihe. Dann schließe das STEP-Signal an den P-Board> Eingängen einfach kurz.> Ist dann das Vibrieren verschwunden?
Wie genau meinst Du das Kurzschließen des Step-Signals am Pololu? Ich
habe eine Step Leitung pro Pololu, Gegen was soll ich die kurzschließen?
Alle Step-Leitungen zueinander? Vielleicht stehe ich hier gerade auf dem
Schlauch, aber ich weiß gerade leider nicht, wie Du das meinst :-(
Was genau bewirkt die Schaltung?
Jonas V. schrieb:> Was genau bewirkt die Schaltung?
Dass Du selektiv jeden einzelenen STEP-Eingang gegen GND schalten
kannst, ohne etwas kaputt zu machen. Damit stellst Du sicher, dass kein
Step-Impuls am A498x anliegt.
Dazu fällt mir noch ein: Du hast hoffentlich alle Eingänge der
A498x-Treiber beschaltet und keinen offen gelassen?
m.n. schrieb:> Dazu fällt mir noch ein: Du hast hoffentlich alle Eingänge der> A498x-Treiber beschaltet und keinen offen gelassen?
Verkabelt gemäß dem Minimal Wiring Diagram:
http://www.pololu.com/picture/view/0J3360 So funktioniert es ja auch im
Breadboard-Setup.
So wie ich es verstehe, wäre die Erweiterung der Schaltung, so wie Du
vorschlägst, in etwa so:
Ich verstehe bei der Schaltung noch nicht so ganz, wie der STEP-In
selektiv gegen GND geschaltet wird? Bzw. wie soll so der Pololu noch
sein Step-Signal erhalten? Oder geht es nur generell um einen Test, ob
der Pololu bzw. der daran angeschlossene Motor ohne Signal auch muckt?
Oder sollte die Schaltung so aussehen?
Genau darum geht es. Dazu könnte man natürlich auch die Verbindung zum
µc trennen.
Hast du die Netzteil-Spannung mal im Betrieb gemessen? Und wie sieht es
mit der Temperatur der Treiber aus? Ändert sich das Verhalten, wenn du
einen dicken Lüfter davor stellst? Die ganzen Motorshields sind
letztlich alle Spielzeug, die im Dauerbetrieb niemals stabil die
Maximalwerte erreichen werden, welche die Chiphersteller in den
Datenblättern angeben. Dafür ist das thermische Design einfach zu
schlecht.
Mit freundlichen Grüßen
Thorsten Ostermann
Ich hatte heute ein bisschen Zeit ein paar Dinge zu testen.
Ich habe einen Breadboard-Aufbau gemacht, an dem ich die einzelnen
Pololus getestet habe.
Der Aufbau beinhaltet sowohl die gleiche Kabellänge zum Motor, wie auch
den gleichen Kondensator wie der "große" Aufbau.
Den Aufbau habe ich u. a. verwendet um die Pololus zu testen. Leider
sind mehr Pololus zweschossen, als ursprünglich gedacht. 2 sind komplett
tot, da tut sich nichts beim Motor, einige andere sind defekt, es findet
lediglich das von mir zuvor schon beobachtete Vibrieren der Welle statt.
Nun werde ich morgen doch noch einmal auf Herz und Nieren den Aufbau
durchmessen, denn die Ursache, warum die Teile zerschossen sind, ist
noch nicht gefunden. Die Versuche am Breadboard ergaben Folgendes:
- Kabellänge zum Motor ist nicht das Problem, kein Unterschied zw.
kurzem dicken und dünnem langen Kabel
- Ein Vibrieren des angeschlossen Motors (er macht schnell ungleichmäßig
einige wenige Schritte links/rechts für ungefähr 1s bis 2s) tritt auf,
wenn ein neues Programm auf das Arduino-Board überspielt wird. Ich habe
mich nun damit beholfen, dass ich die Stromversorgung des Motors erst
nach dem erfolgreichen Übertragen eines neuen Programms an das
Arduino-Board einschalte.
- Bei der Spannungsversorgung mit dem 12 V Netzteil läuft der Motor dann
relativ laufruhig. Zwischen Netzteil und Pololu habe ich eine
Strommessung durchgeführt. Mit dem Strombegrenzer des Pololus habe ich
den Wert auf ca. 1A einjustiert, der Motor läuft ruhig und hat ein hohes
Drehmoment (subjektiv)
- Bei der Spannungsversorgung mit dem 24 V Netzteil läuft der Motor nur
bei nahezu auf Minimum gedrehtem Justierpoti des Pololus ohne
Schrittverluste (gemessen wurden ca. 0,47 A). Der Motor hat dann aber
nahezu kein Drehmoment und kann mit der Hand an der kleinen Welle
angehalten werden. Bei höheren Strömen treten direkt Schrittverluste
(ca. 1 bis 2 pro Umdrehung) auf, das Drehmoment ist jedoch deutlich
höher (nicht per Hand zu bremsen)
- Die Temperatur (gemessen am Kühlkörper des Pololus) steigt im Betrieb
auf bis zu 35°C, wärmer wird er aber nicht.
Zwischenfazit:
- Die Frage ist für mich ungeklärt, warum der Motor bei der 24V
Spannungsversorgung nicht läuft
- Warum der parallele Betrieb der 8 Pololus nicht funktionierte (auch
mit 12 V) ist noch nicht geklärt
- Die Ursache für das Durchbrennen des einen Pololus ist noch nicht klar
(denn offensichtlich werden die Pololus im Betrieb definitiv nicht so
heiß).
Grundsätzlich (da ja nun eh Ersatz für die Pololus her muss), bin ich am
überlegen, ob der Austausch der Pololus gegen einen anderen
Schrittmotortreiber im ähnlichen Preissegment ggf. sinnvoller ist. Wie
geschrieben, habe ich ja auch ein Leadschine DM556 für einen stärkeren
Motor im Einsatz, das Teil funktioniert bisher tadellos. Leider kostet
es auch ca. das 7-fache eines Pololus. Bei meinen Recherchen bin ich auf
Toshiba TB6560AHQ-basierte Platinen gestoßen, die preislich mit ca. 16
Euro in einer ähnlichen Region, wie die Pololus spielen, aber deutlich
mehr versprechen. Ich habe dazu einen Beitrag gefunden:
http://wirbel.htpc-forum.de/cnc/TB6560/index2.html
Hat von Euch zufällig jemand Erfahrung mit solch einem Teil?
Jonas V. schrieb:> Grundsätzlich (da ja nun eh Ersatz für die Pololus her muss), bin ich am> überlegen, ob der Austausch der Pololus gegen einen anderen> Schrittmotortreiber im ähnlichen Preissegment ggf. sinnvoller ist.
Kannst Du bei Nanotec einkaufen? Dann sollten Dir zu den Motoren auch
die SMC11 Treiber aufgefallen sein. Die sind mit dem A3979 bestückt,
haben Schutzdioden an den Ausgängen und ein 'thermisches' Design, das
die gesamte Platine als Kühlkörper nutzt. Natürlich haben diese Treiber
ihren Preis.
Vielleicht sagst Du auch noch etwas zur benötigten Leistung bei Deinem
Projekt. Ich spiele gerade mit dem A4982 herum, und dabei ist ein
ATmega88 gerade gut genug um einen Schrittmotor zu betreiben. Gut, das
liegt auch an der max. Schrittfrequenz von 100kHz.
Der ATmega2560 hat zwar mehr Timer zur Verfügung, aber mit 8
Schrittmotoren wird seine Leistung auch schnell ausgeschöpft sein,
insbesondere wenn noch weitere Interrupts zu verarbeiten sind.
Ich vermute mal, dass die Polulu-Boards zu kleine Elkos haben. Bei
höheren Spannungen fließt mehr Strom, dann gibt es mehr Ripple und damit
sinkt die Qualität der Stromregelung. Im Extremfall gibt es dann
Spannungsspitzen, die den Treiber killen. Edit: Ich sehe gerade, dass
auf dem Board garkein Elko ist. Hattest Du einen angeschlossen? Direkt
am Board, oder über eine Zuleitung?
Die Polulus haben einen /Enable-Eingang. Den würde ich den über einen
externen Pullup nach VCC ziehen und den internen Pullup des Controllers
deaktivieren. Dann ist sichergestellt, dass die Endstufen wärend eines
Controller-Resets (z.B. beim Programmieren) sicher aus sind.
Mit freundlichen Grüßen
Thorsten Ostermann
PS.: Treiber mit dem A3979 gibt es bei mir übrigens auch für
Privatkunden -> http://www.mechapro.de/tinystep.html
Trimmer fuer Einstellung des Stromes zurueckfahren
Strom langsam hochfahren und beobachten wie sich der Motor verhaelt.
Ab einem bestimmten Punktfaengt das Ding an zu zirpen ,pfeifen und
rasseln...wenn Du dann noch weiter gehst schmiert das Biest ab.
Thorsten Ostermann schrieb:
Edit: Ich sehe gerade, dass
> auf dem Board garkein Elko ist. Hattest Du einen angeschlossen? Direkt> am Board, oder über eine Zuleitung?>> Die Polulus haben einen /Enable-Eingang. Den würde ich den über einen> externen Pullup nach VCC ziehen und den internen Pullup des Controllers> deaktivieren. Dann ist sichergestellt, dass die Endstufen wärend eines> Controller-Resets (z.B. beim Programmieren) sicher aus sind.>> Mit freundlichen Grüßen> Thorsten Ostermann>> PS.: Treiber mit dem A3979 gibt es bei mir übrigens auch für> Privatkunden -> http://www.mechapro.de/tinystep.html
Kondensatoren hingen im Zuleitungsstrang. Alle Pololus hängen/hingen
parallel am Zuleitungsstrang und ortsnah vor jedem Pololu ist ein 1000uF
Kondensator (Spannungssicher bis 48V). In Summe bildete sich also ein
8000uF Kondensator durch die 8 Kondensatoren im Zuleitungsstrang...
Die Idee mit dem Enable über externen Pull-Up gefällt mir, ggf. komme
ich darauf zurück, wenn ich nicht von den Pololus weg wechsle...
pot schrieb:> Trimmer fuer Einstellung des Stromes zurueckfahren> Strom langsam hochfahren und beobachten wie sich der Motor verhaelt.> Ab einem bestimmten Punktfaengt das Ding an zu zirpen ,pfeifen und> rasseln...wenn Du dann noch weiter gehst schmiert das Biest ab.
Ich habe natürlich mit minimaler Einstellung gestartet und diese dann
langsam gesteigert.
Heute Morgen habe ich noch ein paar Sachen ausprobiert.
Grundsätzlich zeigt sich: Am Breadboard läuft mit 12V alles einwandfrei,
mit 24V wahlweise Schrittverluste oder kein Drehmoment (siehe letzter
Beitrag von mir).
Ich habe dann aus meinem selbst gelötetem Pololu-Aufnahme-Board alle
Pololus raus genommen (bis auf einen, den hatte ich vorab im
Breadboardaufbau getestet), habe die gleiche 12V Spannungsquelle
(ausreichend dimensioniert) und die gleiche Motorzuleitung
angeschlossen. Fazit: Der Motor läuft nicht, sondern zuckt/vibriert
nur... Ich habe noch einmal alles durchgemessen, finde aber kein Fehler.
Einziger Unterschied, der offensichtlich ist: Im gelöteten Aufbau waren
nun 8 1000uF verbaut. Im Breadboardaufbau habe ich davon nur 2
verwendet. Könnte das einen Einfluss haben?
Temperatur und Strom wurden übrigens permanent gemessen,
interessanterweise zieht der Pololu bei gleicher Trimmereinstellung im
gelöteten Aufbau ca. das 1,5- bis 2-fache an Strom! Die Temperatur ist
im Breadboardaufbau nie über 30°C gestiegen, im gelöteten Aufbau relativ
schnell auf 35°C...
Grundsätzlich habe ich zwischenzeitlich bei meinem Aufbau doch etwas
Misstrauen in die Pololus und mache mich mal auf die Suche nach
Alternativen. Immerhin werden insgesamt sogar 14 Treiber benötigt...
m.n. schrieb:> Kannst Du bei Nanotec einkaufen? Dann sollten Dir zu den Motoren auch> die SMC11 Treiber aufgefallen sein. Die sind mit dem A3979 bestückt,> haben Schutzdioden an den Ausgängen und ein 'thermisches' Design, das> die gesamte Platine als Kühlkörper nutzt. Natürlich haben diese Treiber> ihren Preis.>> Vielleicht sagst Du auch noch etwas zur benötigten Leistung bei Deinem> Projekt. Ich spiele gerade mit dem A4982 herum, und dabei ist ein> ATmega88 gerade gut genug um einen Schrittmotor zu betreiben. Gut, das> liegt auch an der max. Schrittfrequenz von 100kHz.> Der ATmega2560 hat zwar mehr Timer zur Verfügung, aber mit 8> Schrittmotoren wird seine Leistung auch schnell ausgeschöpft sein,> insbesondere wenn noch weitere Interrupts zu verarbeiten sind.
Ja, bei Nanotec kann ich einkaufen. Ich schaue mir die mal an.
Zum Projekt: Insgesamt 15 Stepper werden gemäß Werten aus einem Array
(also eine definierte Verfahrkurve) gefahren. Die Geschwindigkeiten sind
dabei relativ gering (1 bis 2 Umdrehungen pro Sekunde). Es laufen nie
alle Motoren gleichzeitig, die Überdeckung beträgt ca. 70%.
Jonas V. schrieb:> (bis auf einen, den hatte ich vorab im> Breadboardaufbau getestet), habe die gleiche 12V Spannungsquelle> (ausreichend dimensioniert) und die gleiche Motorzuleitung> angeschlossen. Fazit: Der Motor läuft nicht, sondern zuckt/vibriert
Da bei 12V zunächst alles in Ordnung war, bekomme ich den Verdacht, dass
die Teile beim 24V-Betrieb beschädigt wurden. Zu hoher Strom kann
eigentlich nur von den internen Leistungs-FETs gezogen werden. Und diese
sterben recht schnell bei Überspannung. Die kann man dadurch
provozieren, dass man einen bestromten Motor von den Treibern trennt:
Ziehen des Steckers. Darum nehme ich immer Schutzdioden!
Ich hatte mir vor einiger Zeit ein SMC11 besorgt und jetzt noch einmal
von unten angekuckt. Zusehen sind dort: 8 x Dioden im Sub-SMA Gehäuse, 4
x Dioden im SMA- und 5 x Dioden im SMB-Gehäuse. Die 'Nanotheker' haben
die Dioden bestimmt nicht aus Jux bestückt.
Falls Du Interesse an meinem Muster haben solltest, ich kann es
mitlerweile entbehren, da ich diverse andere Musteraufbauten gebaut
habe.
Was Du weiter oben an Bildern zum Aufbau gezeigt hast (betr. Elkos), ist
nun nicht optimal, aber meines Erachtens auch nicht ursächlich für die
Defekte.
Erst einmal Danke an alle! Zwar habe ich das Problem mit den pololus
nicht abschließend geklärt, aber auch viele Impulse für weitere Projekte
mitgenommen.
Da das aktuelle Projekt recht zeitkritisch ist, habe ich mich für die
Lösung des Komplettaustauschs der Pololus entschieden. Als "Ersatz"
kommen jetzt Leadshine DM422C zum Einsatz. Ich habe die Teile heute bei
Kocomotion bestellt, im Endeffekt hat vor allem die Lieferzeit den
Ausschlag gegenüber den Nanotec SMC11 gegeben. Bei Interesse kann ich
dann auch gerne bei Zeiten meine Erfahrungen mit den Teilen schildern.
Jonas V. schrieb:> Bei Interesse kann ich> dann auch gerne bei Zeiten meine Erfahrungen mit den Teilen schildern.
Wenn sich das nicht schon automatisch ergibt ... ;-)
Ich drückt Dir die Daumen, dass es klappt.
Heute habe ich mein Spielzeug mit A4982 ein wenig dokumentiert und
zugänglich gemacht:
http://www.mino-elektronik.de/Generator/takte_impulse.htm#bsp3