{kind=link}
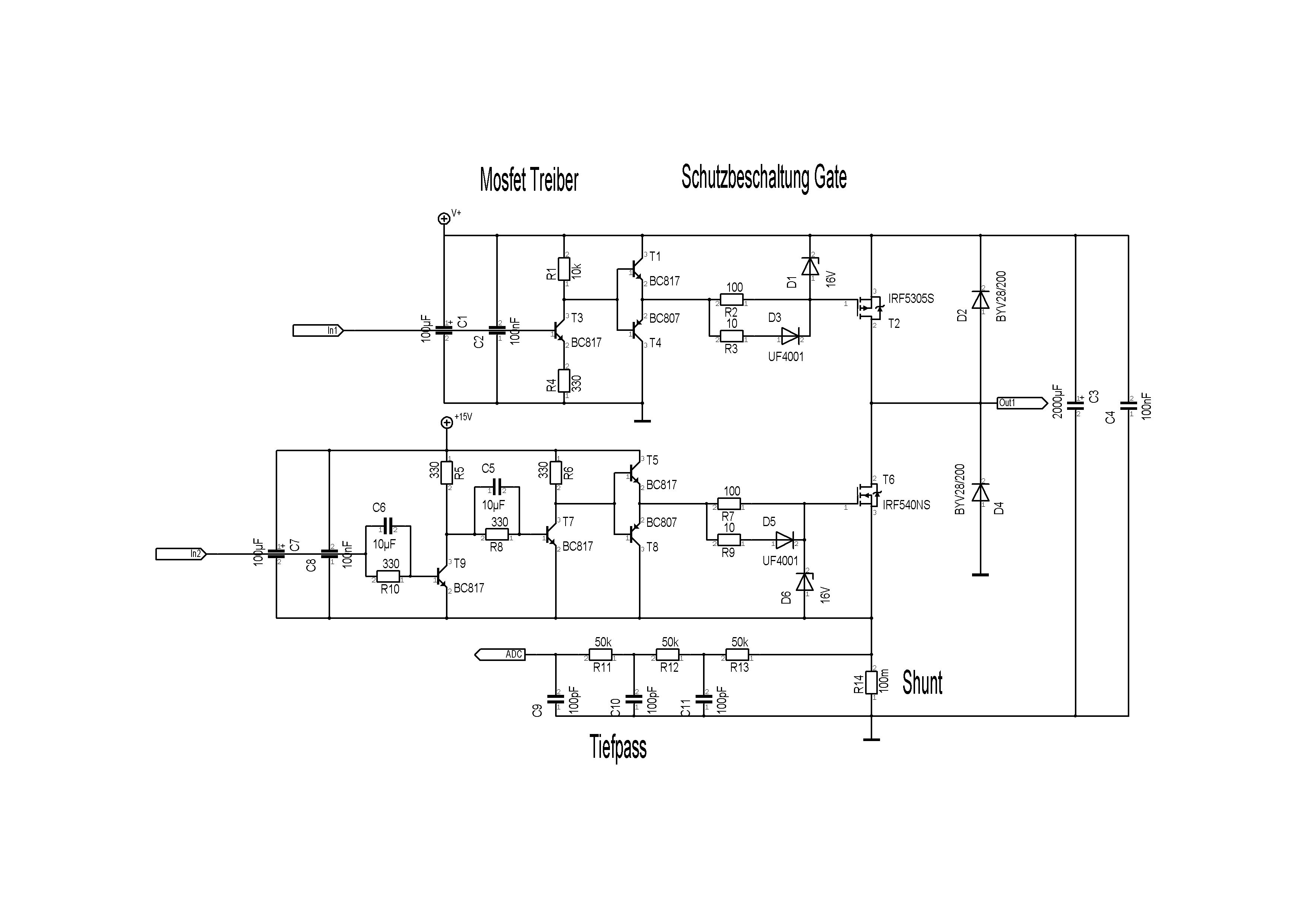
Servus, Ich bin dabei die Steuerung meiner CNC-Fräse zu überarbeiten, da die Kombination aus L297 und L298 zwar wunderbar funktioniert aber einfach "nicht mehr zeitgemäß" ist. Darum will ich MosFets einsetzen um zum einen auf stärkere Schrittmotoren umrüsten zu können und zum andern nicht mehr eine menge Energie am Kühlkörper des L298 zu verheizen. Dazu habe ich mir diese Schaltung ausgedacht/zusammengesucht (*zur Übersichtlichkeit mal nur ein Brückenzweig ohne Ansteuerung*). Bevor ich jetzt weiter mache und die anderen 3 Brückenteile route und die Steuerung (mit Attiny 261) entwerfe habe ich noch einige Fragen zu diesem Schaltplan(teil). 1. Ist es besser die Gate-Treiber an Source des N-Kanal Fets zu hängen oder lieber direkt an GND? Meine Überlegung dazu war, wenn über den Shunt ein Strom von 5A fließt so fällt eine Spannung von (100mOhm*5A) 500mV ab. Will die Push-Pull-Stufe nun den Fet Sperren, so zieht sie das Gate auf Source-Potential =>Passt ja so, lege ich aber den Treiber direkt auf GND, so liegt am Gate eine Spannung von -500mV gegenüber Source an. Die Basis des Transistor T9 liegt allerdings wenn dieser Sperren sollte auch -500mV, da ja vom anderen (hier nicht gezeichneten Brückenzweig) Spannung über dem Shunt abfallen kann und mein µC ja mit GND verbunden ist. Diese Frage stellt sich mir auch bei der Freilaufdiode(D4) und den abblock Kondensatoren (C3 und C4). 2. Kann/sollte ich noch etwas zum Schutz der MosFets tun oder ist die bisherige Gatebeschaltung ausreichend und gut? 3. Die Dimensionierung des Tiefpasses Um den Spannungsabfall am Shunt mit dem ADC des Tiny261 zu messen (indirekt also den Motorstrom) muss ich diesen glätten , da ja mein PWM Signal (30kHz) überlagert ist. Ich habe Stundenlang Google befragt und verstehs immer noch nicht so recht. Um meinen Tiefpass nicht zu langsam zu machen sollte ich die Grenzfrequenz möglichst hoch wählen um dadurch die Einschwingzeit möglichst klein zu halten. Durch die hohe Grenzfrequenz habe ich dann aber keine große Dämpfung mehr => also TP höherer Ordnung. Aber welche Grenzfrequenz sollte ich bei 30kHz PWM-Frequenz wählen?? Das war erstmal ne menge Text aber ich wollte so viele Informationen wie Möglich geben. Ich hoffe ich habe nichts Vergessen und vielen Dank schon mal für die Antworten.
Angehängte Dateien:
-

Halbbruecke.gif
60 KB
Der Sinn der R-D-Kombination an den Gates erschließt sich mir nicht. Der p-MOSFET wird schnell abgeschaltet, der n-MOSFET schnell ein. Umgekehrt wird der p-MOSFET langsam eingeschaltet und der n-MOSFET langsam aus. Sollte für einen Crossoverschutz das nicht gegenläufig sein? Also schnell ausschalten des einen und langsam einschalten des anderen MOSFETS? Wozu ist die doppelte Treiberstufe beim Losidefet? Kann das nicht die Software machen?
Die Dioden D3 udn D5 sollten ein schnelles Einschalten und ein langsameres Ausschalten zur verminderung von EMV Emmisionen ermöglichen hab das aus diesem Artikel http://www.mikrocontroller.net/articles/Treiber Beim Lwoside FET habe ich das so gewählt damit der N-Fet (genau wie der P-Fet) bei logisch "1" am Eingang des Treibers leitend ist. Das ganze könnte man natürlich auch in Software machen aber so brauche ich nur 4 Eingangspins (für die Treiber) und ich habe eine Fehlerquelle nen Kurzschluss zu bauen (indem irrtümlich beide FETs leiten) per Verdrahtung ausgeschlossen.
Ah habs grad erst gesehen, ich hab die D3 falsch gepolt. Die sollte natürlich dazu da sein, dass der FET schnell ein und langsam aus schaltet...
für Schrittmotoren brauchst du wohl eine Strombegrenzung in HW. Zumindest bei größeren Leistungen (über L298) sind Vorwiderstände zur Strombegrenzung nicht mehr tragbar. Die PWM Erzeugung ist ein Teil der mir zu fehlen scheint? Oder wie schnell sind deine AD Wandler ? Wie stellt die HW sicher, daß kein Querstrom fliessen kann ? Hat dein uC im Timer Komplementärausgänge mit HW Totzeit ?
Die PWM Erzeugung macht der Controller in Abgänigkeit der momentanen Ist-Werte im Vergleich zum Soll-Wert also eine einfache Regelung. der ADC ist tatsächlich zu langsam darum will ich den analog comarator nutzen. Die Totzeit wird auch im controller realisiert (da reichen ein nach meiner Rechnung ein paar nop's). Dass kein kurzschluss entsteht muss bei der Entwicklung der Software aufgepasst werden. ich hab mir schon einige Gedanken zur Software gemacht und ich denke das ich diese Probleme in den griff bekomme danke schonmal für eure hilfe
Ist so ein Bauteilegrab (der Gesamte linke Teil) überhaupt noch Zeitgemäß? Gut, um sich selbst zu beweisen dass man‘s kann, ok, aber normalerweise gibt’s dafür doch fertige ICs.
Daniel schrieb: > Ah habs grad erst gesehen, ich hab die D3 falsch gepolt. > Die sollte natürlich dazu da sein, dass der FET schnell ein und langsam > aus schaltet... Was nu. Langsam ein und Schnell ausschalten natürlich..
Klar gibts die teile auch fertig sowohl die Treiber als auch die H-Brücke man könnte die ganze Steuerung fertig kaufen aber ich wills so weit wies geht selber bauen ;-) Zur Verbesserung derEMV sollen die Fets schnell ein und langsam aus schalten. gibts sonst noch Probleme mit dem Plan insbesondere mit der Masseanbindung und dem Tiefpass? Danke schonmal für die Hilfe
gibts denn an dem Schaltplan nichts mehr zu verbessern oder hab ich irgendwas übersehen?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.