Hallo Leute, ich spiele schon seit längerer Zeit einen kleinen Portalkran zu bauen. Und ansteuern möchte ich diese Vorrichtung mit meinem Raspberry Pi. Dienen soll das als Vorstufe einer CNC - da ich der Meinung bin, dass was in klein funktionier, wird auch in groß funktionieren und natürlich als Übung. Größe: etwa 40x50cm Nun bin ich auf der Suche nach Schrittmotoren und bräuchte da etwas Hilfe. Was sagt ihr zu diesen Objekten: http://www.ebay.de/itm/Schrittmotor-VEXTA-PK244-03B-C12-Doppelschaft-/121214588489?pt=Motoren_Getriebe&hash=item1c38f3d649 oder: http://www.ebay.de/itm/Schrittmotor-VEXTA-PX243-03A/121214603454?rt=nc&_trksid=p2047675.m1851&_trkparms=aid%3D222002%26algo%3DSIC.FIT%26ao%3D1%26asc%3D287%26meid%3D2934888030652704836%26pid%3D100005%26prg%3D1073%26rk%3D1%26rkt%3D5%26sd%3D121214588489%26 Da die Motoren ja nicht alleine für das Bewegen reichen, bräuchte ich noch paar Tips, wie ich dies mit einfachen Mittel machen kann. evtl eine einfache Gewindestange und ein feines Zahnrad, oder etc. -> also mit einfacheren Mitteln für kleines Geld. Genauer gesagt: ich würde die Schrittmotoren auch aus älteren Druckern nehmen wenn ich welche hätte :D. Bin für jede Hilfestellung dankbar. Beste Grüße Max Ach ja: wenn jemand brauchbare Bauelemente für mein Projekt hat, dann können wir das Aushandel, bevor die weggeworfen werden ->Keine Macht der Wegwerfgesellschaft!
:
Bearbeitet durch User
Bau einen Scanner auseinander. Da ist alles drin, was du brauchst. Kosten bei eBay fast nix.
Das Prinzip nennt sich Gantry. Beispiele sollte man finden wenn man nach Portalfräsen sucht.
danke für die tips. nur leider hab ich kein alten Drücker da, und das ist nicht mein Ding einen neuen um 40€ zu kaufen um es dann wegzuwerfen. Aber es wäre echt nett wenn jemand mir Antworten auf meine fragen liefert, danke schon man. Beste Grüße Max
Max Derkach schrieb: > Aber es wäre echt nett wenn jemand mir Antworten auf meine fragen > liefert, danke schon man. Welche Frage ? Ich sehe kein Fragezeichen. Ergo keine Antwort. Wenn du mal nach Gantry und Portalfräsen gesucht hättest, würdest Du wissen wie der Antrieb realisiert wurde. Bei mir mit Kugelspindeln und Schrittmotoren. Ich habe auch noch Brauchbare Bauelemente. TB6560 von Toshiba inkl. Rechnung.
Okay Stephan auch wenn deine Aussage etwas frech war, danke ich dir für die Hilfe, ich werde in der Zukunft auf Fragezeichen achten! Meine Frage bezieht sich natürlich auf die beiden Motoren dich ich vor habe zu kaufen. Ich werde das ?-zeichen einfügen, für alle die mit STRG+F nach Fragen suchen. Und die Steuerung mache mich mit RaspberryPi so wie ich es oben schon beschrieben habe. Hat hier evtl. jemand schon mal Software für die Steuerung einer Fräse(Portalkran) geschrieben? Beste Grüße
Max Derkach schrieb: > Hat hier evtl. jemand schon mal Software für die Steuerung einer > Fräse(Portalkran) geschrieben? Ja, aber das wird Dir vermutlich nicht gefallen, da in Quickbasic auf DOS-PC mit Relaiskarte (Gleichstrom-Getriebemotoren) und Lichtschranken (Wegerfassung) am Printerport. ...
Okay Quickbasic ist etwas schlecht, bin da mit C/Java unterwegs -es ist echt mühsam. Ich arbeite mit einer Art Bitmap wobei immer der nächstliegende Punkt angefahren werden soll, was meint ihr ist das der richtige Weg? Und weiterhin die Frage: was haltet ihr von den Schrittmotoren, ich habe bei sowas wirklich keine Ahnung? (siehe erster Beitrag). Kennt evtl. jemand eine gute und günstige Quelle für Schrittmotoren? Können auch welche aus alten Druckern/Scanner sein, es soll ja nicht auf ein nm richtig arbeiten. Danke
:
Bearbeitet durch User
Max Derkach schrieb: > mit einer Art Bitmap Ich habe Vektordaten im HPGL-Format abgearbeitet, aber nicht alle möglichen Befehle ausgewertet. Max Derkach schrieb: > Kennt evtl. > jemand eine gute und günstige Quelle für Schrittmotoren? Günstige Schrittmotoren zur Demonstration der Funktionsweise findet man gelegentlich bei Pollin. > Können auch > welche aus alten Druckern/Scanner sein, es soll ja nicht auf ein nm > richtig arbeiten. Die Präzision hängt nicht (alleine) vom Schrittmotor ab, sondern von der Mechanik. Schrittmotore für Demonstration der Funktionsweise bekommt man recht billig. Auch für die Treiber (Endstufen) hält sich der Aufwand in Grenzen. Willst Du aber nicht nur die Funktionsweise demonstrieren, sondern damit richtig arbeiten, dann brauchst Du hochwertige (teure) Schrittmotoren und auch hochwertige Treiber-Elektronik, die exakt auf die verwendeten Motoren abgestimmt ist. Da werden dann die Motoren im Chopperbetrieb gefahren (also bestromt), um maximales Drehmoment (und Haltekraft) bei minimaler Belastung (Erwärmung) zu erreichen. Das ist eine Wissenschaft für sich, weitere Infos findest Du z.B. mit dem Suchbegriff Trinamic. ...
die meisten Leute in diesem Bereich arbeiten mit Mach3 oder EMC². Für Dich würde es reichen einen Takt /Richtung IC wie den 6560 einfach mit einem Log. Pegel und einem Takt zu versorgen. Ähnlich einer Modellbaufernsteuerung, sofern er nicht autark arbeiten soll. Der Raspberry kann das auch tun. Ein Schalter für Rechts oder Links und 2 Taster. Einer für X und einer für Y. Dann noch 2 für Z und feddich ist die Laube. Der Raspberry braucht nur noch einen Takt ausgeben der dem TB6560 genehm ist und schon bist Du durch damit. Joystick gehen natürlich auch dafür, kosten aber etwas. den mech. Aufbau kannst Du auch bei den 3D Druckern ansehen.
super, hab mit 2 Schrittmotoren bei Pollin bestellt und zwar diese: http://www.pollin.de/shop/dt/NjQ1OTg2OTk-/Motoren/Schrittmotoren/Schrittmotor_PSM42BYGHW603_1_8_.html Ich sehe auch kein Problem eine eigene Transistorschaltung zur Steuerung zu bauen, par Transistoren pro Motor und ein 12V Netzteil (max Ausgang 5A) sollte doch reichen, oder was meint ihr? Danke
Da Du den Rasperry ja unter Linux laufen hast, guck Dir mal die Seite hier an: http://www.linuxcnc.org/ Aber erhlich gesagt würde ich dafür wenn dann eher das Beaglebone Black nehmen wegen der größeren IO-Auswahl. Gruß Tom
Max Derkach schrieb: > Ich sehe auch kein Problem eine eigene Transistorschaltung zur Steuerung > zu bauen, par Transistoren pro Motor und ein 12V Netzteil (max Ausgang > 5A) sollte doch reichen, oder was meint ihr? Danke Ich glaube du stellst dir die Ansteuerung von Schrittmotoren ein wenig sehr einfach vor. Es gibt nicht umsonst div. H-Brücken-ICs und ganze Schrittmotorcontroller-ICs. Das ist alles nicht unbedingt so einfach wie es sich auf den ersten Blick darstellt
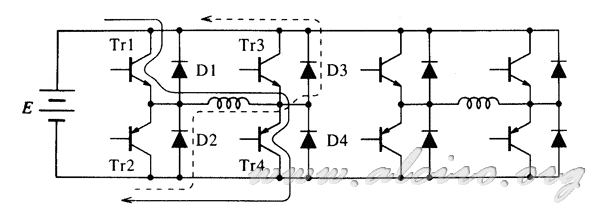
Das wird bestimmt nicht einfach! Aber es sollte doch nach diesem Prinzip funktionieren, was meint ihr? http://www.alciro.org/images/alciro/1109_puente-H-motor-hibrido-dos-fases.png Die Transistoren möchte ich mit einer geeigneten Software und Optokoppler über das Raspberry versuchen anzusteuern, oder verhaue ich mich da? Ich will mir dabei keine teuere Elektronik kaufen, sonst ist der Lerneffekt gleich 0!
{kind=link}
Max Derkach schrieb: > Das wird bestimmt nicht einfach! > Aber es sollte doch nach diesem Prinzip funktionieren, was meint ihr? > http://www.alciro.org/images/alciro/1109_puente-H-motor-hibrido-dos-fases.png Die Schaltung zeigt das Grundprinzip der H-Brücke, es fehlen aber einige Kleinigkeiten für den effizienten Betrieb. > Die Transistoren möchte ich mit einer geeigneten Software und > Optokoppler über das Raspberry versuchen anzusteuern, oder verhaue ich > mich da? Ich kenne weder den Raspberry noch Deine Programmierkenntnisse. Daher kann ich nicht beurteilen, ob Du es schaffst, die H-Brücke im Chopperbetrieb anzusteuern. > Ich will mir dabei keine teuere Elektronik kaufen, sonst ist der > Lerneffekt gleich 0! Der Lerneffekt wird vermutlich negativ (Frust, aufgeben), wenn Du an der statischen Ansteuerung der Motoren festhältst. Das kann man machen, wenn die Motoren keine "Kraft" (Drehmoment, Haltemoment) brauchen, also als Demonstration mit dem Ziel, sich zu freuen, wenn man den Motor überhaupt dreht und in definierte Zielpositionen gefahren werden kann. Dazu kann man die Spannung soweit senken, dass der Motor nicht mehr warm wird. Für ernsthafte Antriebe ist das aber Quatsch, da der Motor keine "Kraft" hat. Ernstzunehmende Stepper-Steuerungen "bestromen" die Wicklungen des Motors. Sie messen dazu den Motorstrom, schalten ihn kurz vor Erreichen der magnetischen Sättigung aus und kurz vor Abklingen des Induktionsstroms wieder ein. Dies bewirkt ein (halbwegs) gleichmäßiges Magnetfeld, ohne dass der Kern in die magnetische Sättigung gerät, was zu starkem Stromanstieg und zum Aufheizen der Wicklung führen würde. Die Motorsteuerung muss also nicht nur entscheiden, welche Spulen in welcher Richtung (mit wieviel Strom bei Mikrostepp) bestromt werden soll, sondern sie muss diese Ströme auch unter Berücksichtigung der Motor-Induktivität so zerhacken, dass das gewünschte Magnetfeld aufgebaut wird, ohne dass es in die Sättigung geht oder zusammenbricht. Für diesen Zweck gibt es spezielle Schaltkreise, die bei kleinen Strömen auch gut bezahlbar sind. Bei höheren Strömen wird es schnell teuer bzw. bei diskreten Lösungen kompliziert. Deshalb haben Schrittmotorsteuerungen für Fräsmaschinen nunmal ihren Preis. Dafür funktionieren sie aber auch zuverlässig und holen das maximale Dreh/Haltemoment bei minimaler Strombelastung (Erwärmung) aus den Motoren raus. Mein Vorschlag betreffs Lerneffekt: Nimm ein paar billigste Stepper (Pollin), baue zwei H-Brücken gemäß der oben gezeigten Schaltung, nimm einen kleinen überschaubaren Mikrocontroller oder von mir aus auch einen PC oder alles was dazwischen liegt, und versuche, die Motoren langsam, schnell, vorwärts, rückwärts drehen zu lassen. Dann ersetzt Du die H-Brücken durch einen preiswerten Steppertreiber (z.B. L192), schreibst das Steuerprogramm dazu (und stellst fest, dass es viel einfacher wird) und vergleichst Motorkraft und Erwärmung gegenüber der Transistor-Lösung. Dann versuchst Du, das erworbene Wissen auf die großen Motoren zum Fräsen umzusetzen. Nun wirst Du keine (bezahlbaren) Treiber-ICs und Eigenbau-Lösungen finden und Dich damit abfinden, dass es sinnvoll sein kann, auf Bewährtes zurückzugreifen und den Preis dafür zu bezahlen. Da steckt nämlich jahrelange Arbeit gut ausgebildeter Ingenieure drin, da muss man lange lernen und basteln, um Vergleichbares zu erreichen. ...
maschbauer schrieb: > Bau einen Scanner auseinander. Da ist alles drin, was du brauchst. > Kosten bei eBay fast nix. Oder bei Ebay Kleinanzeigen in der Nähe gucken und selber abholen, dann spart man Zeit und Porto.
Die Motoren habe ich bereits bestellt, siehe weiter oben. Ich werde einwenig damit experimentieren, mal schauen was dabei rauskommt. Komme aus der Halbleiter-/Programmierrichtung und denke, dass dies nicht das Problem sein wird -soll ja ein Projekt werden, dass es nicht optimal wird ist mir bewusst. Falls doch alles schief läuft, wird ein Controller und Treiber (L192) bestellt, wie der Hannes Lux beschrieben hatte -an den negativen Lerneffekt glaube ich nicht, denn wenn es nicht klappt bin ich auch etwas schlauer geworden :D. Weiterhin vielen Dank!
Hallo Leute, nun habe ich selber einiges mit den Schrittmotoren gemacht. Für einen Motor habe ich die H-Brücke selber gemacht und für den anderen eine fertige Treiberplatine verwendet. Der Fazit hierfür: Es macht verdammt viel Arbeit so eine H-Brücke selber zu bauen, aber das sollte man gemacht haben. Den Unterschied zu einem fertigen Treiber (L298) erkenne ich (für meine Zwecke ->Plotter) nicht, nur wie gesagt es macht zu viel Arbeit und letzen Endes auch teuerer. Die Motoren habe ich hier in München günstig von privat bekommen (Nema17). Ich möchte mich für eure Hilfe nochmal bedanken und auch an die Schwarzmaler hier ein Danke! Frohe Festtage an alle! Beste Grüße max
Deswegen sagte ich ja, TB6560 oder ähnliches. Ich habe noch 4 Stück da. Selbermachen geht, macht aber wenig Sinn. Ist mit einem IC eben doch deutlich einfacher. Und da hattest Du nur die Brücke,....denke ich. Keinerlei Stromüberwachung etc. Einen Guten Rutsch. Stephan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.