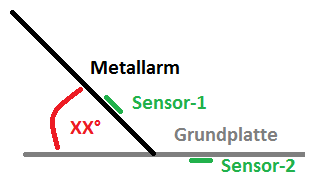
Hallo Community, ich möchte die Stellung eines Metallarms(Kran) messen, indem ich den Winkel im Verhältnis zur Grundplatte erfasse. Das die Grundplatte und der Metallarm ggf. je einen Sensor benötigen die entsprechend verrechnet werden wäre denkbar. Wie kann ich dies möglichst einfach realisieren und welche Sensor-Typen/Chips kommen dafür in Frage? Gruß NickNack
Angehängte Dateien:
-

Winkelmessung.png
2,3 KB
in welchem (winkel)bereich ist der arm drehbar? ein einfaches poti wäre wahrscheinlich die einfachste lösung (wenn auch nicht hochpräzise). alternativ auch ein drehgeber - die müssen allerdings beide an der achse befestigt werden.
NickNack schrieb: > Wie kann ich dies möglichst einfach realisieren und welche > Sensor-Typen/Chips kommen dafür in Frage? Wenn dein Kran sich während der Messung nicht hektisch bewegt, könnte man einen Beschleunigungssensor verwenden. Der mißt dann allerdings nicht den Winkel zu einer Grundplatte sondern zum Schwerkraftvektor der Erde. Mit zwei solchen Sensoren ließe sich natürlich auch der Winkel gegen die Grundplatte berechnen. Um die Chip-Auswahl einzugrenzen, müßte man etwas über die geforderte Genauigkeit wissen.
Ich merke ich habe zu wenig Details genannt: Daniel F. schrieb: > in welchem (winkel)bereich ist der arm drehbar? > ein einfaches poti wäre wahrscheinlich die einfachste lösung (wenn auch > nicht hochpräzise). alternativ auch ein drehgeber - die müssen > allerdings beide an der achse befestigt werden. Eine Mechanische Verbindung zwischen Grundplatte und Kran-Arm kommt nicht in frage, da zu empfindlich gegen Wasser, Schmutz, Eis etc. Der Winkelbereich beträgt ca. 45°. Mike schrieb: > Wenn dein Kran sich während der Messung nicht hektisch bewegt, könnte > man einen Beschleunigungssensor verwenden. Der Kran-Arm ist eigentlich durchgehend in Bewegung und starken Vibrationen/Rucklern ausgesetzt. Die Ausgangsposition beim Start der Messung kann variieren.
Welche möglichekiten hast du im Drehlager? rotary encoder, inkrementalgeber, ... Welche Genauigkeiten?
me schrieb: > Welche möglichekiten hast du im Drehlager? NickNack schrieb: > Eine Mechanische Verbindung zwischen Grundplatte und Kran-Arm kommt > nicht in frage, da zu empfindlich gegen Wasser, Schmutz, Eis etc. ---------------------- me schrieb: > Welche Genauigkeiten? Mike schrieb: > Um die Chip-Auswahl einzugrenzen, müßte man etwas über die geforderte > Genauigkeit wissen. Ich wurde eine Genauigkeit von ca. 2° einplanen.
Ich würde einen flüssigkeitsbasierten Neigunssensor einsetzen: http://www.2e-mechatronic.de/produkte/sensorik/kapazitiver-360-neigungssensor.html davon braucht es dann auch nur einen einzigen am Kranausleger, weil die Flüssigkeit bereits die Horizontale zum Erdschwerefeld einnimmt.
NickNack schrieb: > Der Kran-Arm ist eigentlich durchgehend in Bewegung und starken > Vibrationen/Rucklern ausgesetzt. Vibrationen und Ruckler kann man rausfiltern. Wenn sich der Sensor nahe am Drehpunkt der Bewegungen montieren läßt, stören Drehbewegungen eine Messung über den Beschleunigungsvektor auch nicht sonderlich, bei geradliniger Beschleunigung in eine Richtung schon eher. Wenn die Armneigung über Seile gesteuert wird, könnte man auch die Seillänge/Drehung der Trommel messen.
Suche mal nach "magnetischer drehgeber" Das sind, vereinfacht gesprochen, ICs, die die Orientierung eines Magnetfeldes erkennen, sozusagen ein lokaler Kompass. Der Vorteil: man braucht keine mechanische Verbindung zwischen Geber (Magnet auf der Drehachse) und Nehmer (IC auf der Grundplatte). Einschränkung: Man muss ins Zentrum der Drehachse mit der Mimik. Grosser Vorteil: Beschleunigte Bewegungen, Ruckler etc wirken nicht auf die Positionsbestimmung ein.
oder optisch die Entfernung von der Grundplatte zum Ausleger messen und umrechnen.
Vielleicht wäre auch das Messprinzip zur Lagerekennung von Quadrocoptern denkbar, also die Kombination aus Gyroskop, Beschleunigungssensor und Kalmanfilter.
Steffen schrieb: > oder optisch die Entfernung von der Grundplatte zum Ausleger messen und > umrechnen. Je nach Umgebungsdreck kann da ein Ultraschall Abstandssensor geeigneter sein.
NickNack schrieb: > Eine Mechanische Verbindung zwischen Grundplatte und Kran-Arm kommt > nicht in frage, da zu empfindlich gegen Wasser, Schmutz, Eis etc. zum empfindlich - ok, aber irgendwie muss der ausleger doch gelagert sein? ich kanns mir beim besten willen nicht vorstellen; kannst das prinzip vielleicht näher beschreiben?
Tillmann schrieb: > davon braucht es dann auch nur einen einzigen am Kranausleger, weil die > Flüssigkeit bereits die Horizontale zum Erdschwerefeld einnimmt. Aber nur, wenn sich keine dynamischen Kräfte (Beschleunigung durch Bewegung) überlagern. Was ist der Vorteil von einem Flüssigkeitsensor gegenüber den heutzutage weit verbreiteten MEMS-Sensor?
Angehängte Dateien:
-

dummy.jpeg
38 KB

Da das System in mehreren Fahrzeugen zum Einsatz kommen soll hier ein Beispiel von einem "Räumschild". In diesem Fall hat das Gelenk großes Spiel (ca. 2cm) in alle Richtungen. Optische und Akustische Signale können aufgrund der Einsatzbedingungen nicht zum Einsatz kommen.
Also ich würd das mit n Potti machen. An der Welle anflachen und gut. Oder je mach Antrieb (ich vermute Hydraulik) einen Linearmessung machen und wieder umrechnen.
Eine sehr harte Umgebung für einen Sensor der auch sehr viel aushalten muss. Da ist die Mechanik das wichtigste. Eine Option könnte ein Seilzuggeber sein. Schau mal bei Fernsteuergeräte nach: http://www.fernsteuergeraete.de/de/produkte/seilzuggeber.html , oder noch besser der Neigungssensor: http://www.fernsteuergeraete.de/de/produkte/neigungssensor.html für Kran & Co.
aha, jetzt kommen wir der ganzen sache schon näher. es gibt eine achse, aber aufgrund des großen spiels kann dort kein sensor verbaut werden. und das ganze soll für einen schneepflug, baggerschaufel o.ä. sein. mit zwei beschleunigungssensoren könnte es evtl. funktionieren: einen auf den arm, einen auf die grundplatte. mit einem tiefpass-filter werden die spitzen die im betrieb auftreten rausgefiltert. damit liefern die zwei sensoren jeweils die drei komponenten eines vektors, den winkel zwischen den zwei vektoren kann man dann recht einfach berechnen. da der winkel des arms auch irgendwie eingestellt wird/werden muss (?) könnte man auch am hydralikzylinder (?) einen lineargeber anbringen und den winkel berechnen. die drei seiten des dreiecks sind damit bekannt, damit sind auch die winkel definiert. in meiner daumen*pi proberechnung ob sich das ausgehen könnte lag die abweichung durch ein spiel von 2cm bei 0,6°...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.