Hallo, https://data.epo.org/publication-server/image?imageName=imgaf001&docId=7546936 Wie bekomme ich die Negativen Spannungen mit diesen Halbbrücken hin? Ist es nicht besser 3 Vollbrücken zu verwenden, denn diese paar IGBTs machen den Kohl ja nichtmehr Fett. Danke schonmal.
Jan R. schrieb: > Wie bekomme ich die Negativen Spannungen mit diesen Halbbrücken hin? Vom Motor aus gesehen ist die Spannung schon dann negativ, wenn z.B. die U Halb-Brücke unten leitet und die z.B. V oben. Schon ist die Wicklung zwischen U und V andersherum gepolt, als wenn U high ist und V low. Zusätzliche Brücken bringen hier nichts. Siehe z.B. hier: http://www.zum.de/dwu/depotan/apem112.htm
Habe gerade nochmal drüber nachgedacht: Die Synchron oder auch Asynchron Maschinen, Stellen ja eine Symmetrische Belastung da. Der Sternpunkt des Motors, stellt 0V da. Wenn die Gleichgerichtete Eingangsspannung 320V Beträgt, Können die Spitzenwerte jeweils nur +/-160V Betragen. Da der Sternpunkt ja genau die Mitte Darstellt. Ist das soweit richtig?
Die Spannung an der Ständerwicklung ist ja garnicht sinusförmig, Somdern hat die Form des PWM gedöns, kann ich diese Spannung wenn ich z.b. die Blindleistung der Maschine berechen möchte als Sinusförmig annehmen oder nicht? Was ist eigentlich mit der EMK Spannung? Diese ist ja sinusförmig. Da ist meiner Meinung nach das Problem, im Leerlauf zieht die Maschine ja beinahe keinen Strom, Bei normaler Wechselspannung, würden sich die Eingangsspannung und die EMK Spannung jetzt ja einfach zu ca. 0 addieren, und somit würde kein Stromfluss stattfinden, bei dem PWM ist das jetzt ja aber nicht ganz so einfach, der Anker induziert eine Sinusförmige Wechselspannung, die,Eingangsspannung ist aber nur entweder High oder Low zwischendrinnen gibts nicht, wie können sich diese beiden Spannungen, jetzt zu null Addieren? Das geht doch garnicht, beginnt der Motor jetzt zu ruckeln, oder gleicht sich das über die anderen Phasen aus? Ist der oben genannte Frequenzu,richter überhaupt für Synchronmotoren geeignet? MfG Jan
Wie so oft, machst du es dir wieder viel zu kompliziert. In einer Dreieckschaltung z.B. gäbe es gar keinen Sternpunkt, der spielt für einen Drehstrommotor in Sternschaltung aber auch keine Rolle. Jede der Halbbrücken kann den gesamten Spannungsbereich von 0-325V durchfahren (z.B. mit PWM) und deswegen kann jede Wicklung des Motors bis zu +325V oder -325V sehen. https://de.wikipedia.org/wiki/Dreiphasenwechselstrom Jan R. schrieb: > Die Spannung an der Ständerwicklung ist ja garnicht sinusförmig, Somdern > hat die Form des PWM gedöns, Die Induktivität der Wicklung ist ein Tiefpass, der die PWM Frequenz zum Sinus umformt. Jan R. schrieb: > Ist der oben genannte Frequenzu,richter überhaupt für Synchronmotoren > geeignet? Das hängt völlig von der Ansteuerung und der Schaltgeschwindigkeit der Transistoren ab. Wenn du sie mit sinusmoduliertem PWM ansteuerst und sie die Frequenz übertragen können, ist das ok. Allerdings nimmt man im allgemeinen heute keine Transistoren mehr, sondern MOSFet oder IGBT.
ja aber die Spannung an der Induktivität, ist leider nicht sinusförmig. sondern nur der Strom! ich verduchs morgen mal zu simuliernen? die induktivität selbst ist ein Hochpass, die tiefen frequenzen siehst du am leitungswiderstand!
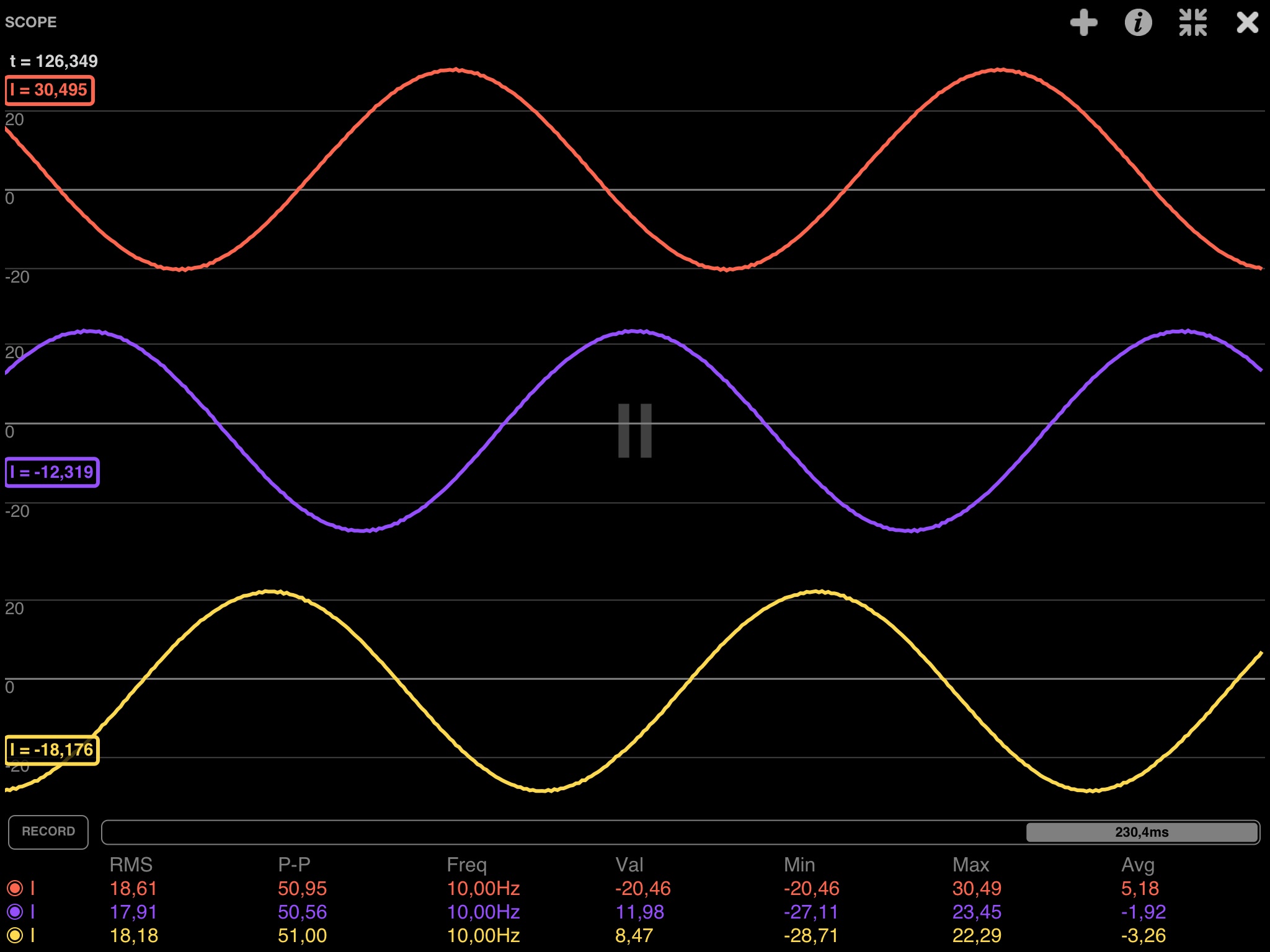

simulationsergebmos auf die,schnelle: Ströme Sauber spannungen! Dreckig! ist das Drecksignal ausreichend für den Motor? was für glättungs,ethoden bieten sich an?
Ich weiß nicht wie oft man es hier schon gesagt hat. Bücher zu den Grundlagen der E-Maschinen klären alle Fragen zur Berechnung der einzelnen Größen in der EM. Bücher über Frequenzumrichter klären alle Fragen zur Ansteuerung. In der heutigen Zeit gibt es soooooooooo viele Möglichkeiten sich zu informieren. Neuer Tab -> Suchmaschine aufrufen -> "Grundlagen Drehstrommaschinen" eingeben -> Enter Neuer Tab -> Suchmaschine aufrufen -> "Grundlagen Frequnezumrichter" eingeben -> Enter
ich schrieb: > Ich weiß nicht wie oft man es hier schon gesagt hat. Ich blick bei macman2010 auch immer nicht ganz durch, der Mann scheint sich das Leben gerne schwer und kompliziert zu machen - sieht Probleme, wo keine sind. In diversen Threads zeigt er sich auch recht lernresistent. Jan R. schrieb: > ist das Drecksignal ausreichend für den Motor? was für glättungs,ethoden > bieten sich an? 1000Hz PWM Frequenz sind ja auch ein Witz, ausserdem wissen wir nichts über die Induktivität deiner Wicklungen. Mein FU-Projekt z.B. arbeitet mit 31 kHz, da habe ich pro Sinusschwingung bei 50Hz Output etwa 600 PWM Wellenzüge. Dementsprechend fein ist auch der Sinus. Bei deiner Simulation ist das ja höchstens eine Art Trapez. FU-geeignete Motore sollten allerdings isolationsfest sein, denn selbst bei niedriger Effektivspannung an der Wicklung hast du natürlich Spannungsspitzen in Höhe der Zeischenkreisspannung. Ich habe aber noch keinen Motor gesehen, der diese Bedingung nicht erfüllt.
Jan R. schrieb: > Ist das soweit richtig? Nein. Da die 3 Phasen um 120 Grad versetzt sind, liegt niemals an allen Spulen dieselbe (maximale) Spannung. Sondern wenn an der einen 185V liegen sind an beiden anderen nur 135V (für in Summe 320V) Der Sternpunkt springt von 135V auf 185V (in Bezug zur unteren Versorgungsspannung) je nach Phasenlage.
Matthias Sch. schrieb: > Allerdings nimmt man im > allgemeinen heute keine Transistoren mehr, sondern MOSFet oder IGBT. Na, für was steht wohl das "T" in MOSFET und IGBT?
Jan R. schrieb: > Wenn die Gleichgerichtete Eingangsspannung 320V Beträgt, Können die > Spitzenwerte jeweils nur +/-160V Betragen. Da der Sternpunkt ja genau > die Mitte Darstellt. Wenn jede Halbbrücke, gegen Masse gesehen, einen Sinus mit dem Offset der halben Zwischenkreisspannung ausgeben würde - also einen Hub von 0 bis Zwischenkreispotential hätte - , dann wäre die resultierende Phase-Phase-Spannung tatsächlich kleiner, als es mit der Spannung des Zwischenkreises möglich wäre. Der Spannungshub der resultierende Phase-Phase-Spannung würde sich dann auf +/- wurzel(3)/2 * Zwischenkreisspannung belaufen. Damit nun Phase-Phase-Spannung dennoch einen Hub von +/- der Zwischenkreisspannung bekommt, gibt es mehrere Ansätze, die darauf beruhen, die Spannung jeder Halbbrücke (gegen Masse gesehen) nicht Sinusförmig zu generieren. Eine Möglichkeit ist es, eine Sinusspannung mit überlagerter dritter Oberwelle auszugeben. Diese dritte Oberwelle subtrahiert sich dann wider in der resultierende Phase-Phase-Spannung. Eine weitere Möglichkeit ist ein "Sinodide" Spannungsverlauf. Durch die Differenzbildung beim Abgreifen der Spannung zwischen zwei Phasen erhlät man wider eine reine Sinusspannung, dessen Amplitude dann auch bis zur maximalen Zwischenkreisspannung reicht. Das Verfahren beschreibt Atmel in mehreren aplication notes auch sehr gut: http://www.atmel.com/Images/doc8030.pdf
Der Knackpunkt liegt doch darin, dass der Nullpunkt des Drehstromsystems nach den Schaltern nicht auf 0V oder +325V der Zwischenkreisspannung liegt, sondern auf + 325V/2. zum Verständnis der einfache Fall mit einer Phase: Eine Einphasenbrücke legt doch die Enden der Diagonale abwechselnd auf 0V und V+ Der Punkt der Wicklung, der keine Wechselspannung führt ist dann doch in der Mitte zwischen den beiden Wicklungsenden und führt die Spannung V+/2 Wenn man z.B. zwei gleiche Widerstände in reihe in die Diagonale schaltet, erreicht man elektrisch diese Mitte und hat dort 0V Wechselspannung und eine DC-Komponente von V+/2, wenn die Tastung symmetrisch verläuft.
ich schrieb: > Ich weiß nicht wie oft man es hier schon gesagt hat. > > Bücher zu den Grundlagen der E-Maschinen klären alle Fragen zur > Berechnung der einzelnen Größen in der EM. > > Bücher über Frequenzumrichter klären alle Fragen zur Ansteuerung. > > In der heutigen Zeit gibt es soooooooooo viele Möglichkeiten sich zu > informieren. > > Neuer Tab > -> Suchmaschine aufrufen > -> "Grundlagen Drehstrommaschinen" eingeben > -> Enter > > > Neuer Tab > -> Suchmaschine aufrufen > -> "Grundlagen Frequnezumrichter" eingeben > -> Enter wenn ich beginne mich mit einem Thema auseinander zu setzen, mache ich das immer! Meiner meinung nach Hören die grundlagen aber nach dem Schaltbild des u,richters auf!
Jan R. schrieb: > ...mache ich > das immer! Wird aber nicht immer so gesehen! Gar nicht bis äusserst selten sieht man von Dir eine Z e i c h n u n g, ein Schalt- oder Ersatzschaltbild, mit Bezeichnungen oder eingezeichneten Grössen. Die würde häufig die Frage schon obsolet machen. Statt dessen geschwurbelte Prosa ohne Ende.
> Meiner meinung nach Hören die grundlagen aber nach dem Schaltbild des > u,richters auf! Die Vorlesungsskripte von diversen Unis/FHs, die im Netz zu finden sind, sagen mir exakt das Gegenteil. Das Schaltbild ist der Beginn....
Hallo, glaube, hänge das hier mal an, ein Festplattenmotor, ist ja auch ein Synchronmotor,und hat sozusagen einen Frequenzumrichter. Ein Umrichter, hat ja keinen Nullleiter, da das 0 Potential des Umrichters, nicht gleich der Erdmasse ist. Trotzdem hat der Motor 4 Anschlüsse, und ich verstehe nicht, wofür der 4. da ist. , Vorallem, weil der Motor im Dreieck geschaltet ist.
Jan R. schrieb: > Trotzdem hat der Motor 4 Anschlüsse, und ich > verstehe nicht, wofür der 4. da ist. , Vorallem, weil der Motor im > Dreieck geschaltet ist. Woher weißt du, dass der Motor in Dreieck geschalten ist? Wenn ich einen Motor mit 4 Anschlüsse vor mir habe, dann würde ich mal annehmen dass sich darin 2 Wicklungen befinden.
innerand innerand schrieb: > Wenn ich einen Motor mit 4 Anschlüsse vor mir habe, dann würde ich mal > annehmen dass sich darin 2 Wicklungen befinden. Bei einem BLDC aus einer Festplatte? Halte ich für sehr unwahrscheinlich. Die 4 Anschlüsse sind mit großer Wahrscheinlichkeit die 3 Windungen + Common (praktisch Sternpunkt). LG, N0R
Ja aber die Umrichter, haben ja keinen Nullleiter...
Wo?? der Sternpunkt, hat ja ein anderes Potential, wie Erdmasse.. http://de.m.wikipedia.org/wiki/Datei:EC-Motor.svg Wofür braucht man die Positionsbestimmung? Die Drehzahl hängt bei synchrolotoren, doch direkt mit der Ansteuerfrequenz zusammen...
{kind=link}
MaWin schrieb: > Da die 3 Phasen um 120 Grad versetzt sind, liegt niemals an allen Spulen > dieselbe (maximale) Spannung. Sondern wenn an der einen 185V liegen sind > an beiden anderen nur 135V (für in Summe 320V) Der Sternpunkt springt > von 135V auf 185V (in Bezug zur unteren Versorgungsspannung) je nach > Phasenlage. Sag niemals niemals! Wenn die 3 Halbbrücken nicht mit Sinus sondern mit den s.g. Popokurven angesteuert werden, kriegt man auch den vollen Spannungshub. Das ist auch die übliche Vorgehensweise: Beitrag "SVPWM mit LPC1769"
old man schrieb: > MaWin schrieb: >> Da die 3 Phasen um 120 Grad versetzt sind, liegt niemals an allen Spulen >> dieselbe (maximale) Spannung. Sondern wenn an der einen 185V liegen sind >> an beiden anderen nur 135V (für in Summe 320V) Der Sternpunkt springt >> von 135V auf 185V (in Bezug zur unteren Versorgungsspannung) je nach >> Phasenlage. > > Sag niemals niemals! Wenn die 3 Halbbrücken nicht mit Sinus sondern mit > den s.g. Popokurven angesteuert werden, kriegt man auch den vollen > Spannungshub. Das ist auch die übliche Vorgehensweise: > > Beitrag "SVPWM mit LPC1769" Ist eine Popokurve ein korrekt Elektrotechnischer Ausdruck? Aber nochmal zum EC-Motor, hab mir das mal durchgelesen, Ein einfacher Lüfter bspw. hat grundsätzlich das verhalten eines Mech. Kommutierten Motors, dieser wird nicht über einen Umrichter angesteuert, sondern die Halsenden, bilden mehr oder weniger den Kommutator nach. Sprich Leerlaufdrehzahl ist dort, wo UEMK = UE bzw. UE*Tastgrad... bei PWM Ansteuerung. Eine Frage, habe ich zu den Sinus-DC-Motoren, eigentlich, sind diese Motoren, ja nichts anderes als Synchronmotoren. Was ist hier die Leerlaufdrehzahl? Wenn man beachtet, dass die spulen hier nicht mit einer festen Frequenz angesteuert werden, sondern sich die Frequenz aus der Momentanen Drehzahl ergibt.
Jan R. schrieb: > Ist eine Popokurve ein korrekt Elektrotechnischer Ausdruck? Nein, Popokurve ist kein korrekter elektrotechnischer Ausdruck. Gruß Christian
Jan R. schrieb: > Eine Frage, habe ich zu den Sinus-DC-Motoren, eigentlich, sind diese > Motoren, ja nichts anderes als Synchronmotoren. Was ist hier die > Leerlaufdrehzahl? Wenn die EMK-Spannung niedriger als die angelegte Spannung ist, fließt ein Strom und es entsteht ein Drehmoment und der Motor beschleunigt. Wenn sich die EMK-Spannung an die Klemmenspannung annähert, wird das Drehmoment geringer und irgendwo ergibt sich ein Gleichgewicht. Die Leerlaufdrehzahl ergibt sich dadurch, dass die EMK-Spannung gleichgroß wie die angelegte Spannung ist.
Jan R. schrieb: > weiß das keiner? Jan R. schrieb: > Jan R. schrieb: >> weiß das keiner? > > ???? Dein Gepushe nervt ! Akzeptiers doch, wenn niemand mehr antworten will und kauf dir erst mal ein gescheites Buch, statt per Anhalter durch die Elektrotechnik zu hüpfen.
Johannes E. schrieb: > Jan R. schrieb: >> Eine Frage, habe ich zu den Sinus-DC-Motoren, eigentlich, sind diese >> Motoren, ja nichts anderes als Synchronmotoren. Was ist hier die >> Leerlaufdrehzahl? > > Wenn die EMK-Spannung niedriger als die angelegte Spannung ist, fließt > ein Strom und es entsteht ein Drehmoment und der Motor beschleunigt. > Wenn sich die EMK-Spannung an die Klemmenspannung annähert, wird das > Drehmoment geringer und irgendwo ergibt sich ein Gleichgewicht. > > Die Leerlaufdrehzahl ergibt sich dadurch, dass die EMK-Spannung > gleichgroß wie die angelegte Spannung ist. Das habe ich auch gedacht... Allerdings, gibt es doch auch eine Phasenverschiebung dieser Spannung, da der Sinusbetrieb ja eigentlich einem Drehstromsyncronmotor ähnelt. Ein Drehstrom Asynchron bzw. Synchronmotor am Frequenzumrichter lässt sich ja praktisch beliebig aufdrehen, und dreht dann mit der Winkelgeschwindigkeit wsinus/(polpaarzahl-schlupf) bzw. wsinus/polpaarzahl. Was ist bei einem im Link beschriebenen EC Sinusmotor anders, er hat keinen umrichter sondern regelt die drehzahlen mithilfe der Hallsonden. Müsste man dann nicht ehr sagen, die leerlaufdrehzahl, ist dann erreicht, wenn die einzelnen Phasen keine Wirksame Energie mehr aufnehmen, sondern stattdessen nurnoch Blindleistung schieben? @grrrr (was auch immer das sein soll) >Dein Gepushe nervt ! Akzeptiers doch, wenn niemand mehr antworten will >und kauf dir erst mal ein gescheites Buch, statt per Anhalter durch die >Elektrotechnik zu hüpfen. Du wirst es nicht glauben aber auch ich lese Bücher, wenn ich mir aber zu jedem Mückenschiss ein Buch kaufen würde, wäre mein Geldbeutel bald leer, übertrieben gesagt. Das nächste ist, dass es tausende Bücher zu Elektrischen Maschinen gibt. Die ersten beschreiben wirkliche Grundlagen, wo mir 90% bekannt sind. Die nächsten, sind wieder zu Ausführlich und übermitteln Sachen, die nur Relevant sind, wenn man sich im Elektrotechnik Studium auf Elektrische Maschinen spezialisiert. Jetzt bleibt eine kleine Scnittmenge, der EMaschinen Bücher die ich haben wollte, Anspruchsvoll aber auch nicht bis ins Tiefste Detail, die mir geneau das über EC Motoren in diesem Falle erzählen, was ich brauche.... MfG
Jan R. schrieb: > sondern regelt die drehzahlen mithilfe der Hallsonden. Nö, das tut er nicht. Anstatt dich wie immer im luftleeren Raum zu bewegen solltest du uns mal sagen, was du überhaupt erreichen willst. Seit Wochen stellst du irgendwelche theoretischen Fragen, um dann die Antworten zu zerpflücken und in dein Weltbild einzupassen. Der mit Sensoren ausgestattete PMSM benutzt keineswegs die Sensoren, um damit die Drehzahl zu regeln, sondern um den Vektor für die SVM zu resynchronisieren. Je nach Ansatz wird also ein Zeiger in die Sinustabelle (wie z.B. in AVR447) oder die Sin/Cos Berechnung auf einen bekannten Winkel resynchronisiert. Die Drehzahl des PMSM wird nach wie vor über die Höhe der PWM geregelt, genauso wie bei jedem blockkommutierten Motor (Multiplikation der Sinuswerte mit der gewünschten Amplitude). Die Sensoren dienen übrigens auch dazu, um einen Motor anzufahren, das geschieht meistens über Blockkommutierung. Es steht dir natürlich frei, die Sensoren zur Geschwindigkeitsmessung zu benutzen und dann über eine geschlossenen Schleife die PWM zu regeln. Es gibt keine natürliche Leerlaufdrehzahl eines solchen Motors. Wie immer dreht sich solch ein Motor mit konstanter Drehzahl, wenn die hineingesteckte Energie die Reibungskräfte gerade ausgleicht.
Nein, mit den Hallsensoren regelt man nicht die Geschwindigkeit, das ist richtig. Die Hallsensoren, messen nur die Momentane Position des Rotors, Und schalten so die Spulen. Es wird quasi ein Mechaischer Kommutator emuliert. Was ich aber nicht verstehe ist, warum betriebt man diese Motoren so. Warum klemmt man nicht einen Sinusumrichter davor, und steuert die Drehzahl über die Frequenz...
Jan R. schrieb: > Was ich aber nicht verstehe ist, warum betriebt man diese Motoren so. Erstens: > Die Sensoren dienen übrigens > auch dazu, um einen Motor anzufahren, das geschieht meistens über > Blockkommutierung. Du kannst (ich habe damit experimentiert) die ersten paar Schritte auch mit einem VFD machen, aber dazu musst du trotzdem die Stellung des Motors wissen. > Warum klemmt man nicht einen Sinusumrichter davor, und steuert die > Drehzahl über die Frequenz... Weil das wesentlich ineffizienter ist. Wenn du N Watt Leistung reinsteckst, liefert dir der Motor N * Wirkungsgrad heraus. Das ist mit einem FU wesentlich schwieriger zu machen, denn du müsstest 2 Parameter im Griff haben: Frequenz und Höhe der PWM. So steuerst du die Höhe der PWM und der Motor macht den Rest alleine. Eine V/f Kennlinie ist oft nicht zu machen, denn die Last an einem Motor kann sehr unterschiedlich sein. Fährst du mit einem PMSM einen Berg hoch, oder mit gleicher Geschwindigkeit eine gerade Strecke, ist die Frequenz gleich aber die Höhe der PWM unterschiedlich.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.