Also erstmal, ich habe mit einem RP6 Roboter angefangen zu programmieren. Nun habe ich schon einige nette Schaltungen programmiert aber stehe bei einem Thema immernoch an. Wie kann ich über die spi Buchse Daten an den PC bzw. die Konsole senden? Beim RP 6 ging das und sogar mit optischer Darstellung von zB. dem pwm Signal der Motorensteuerung. Das ist allerdings auch ein Programm vom Hersteller. Gibt es da eine Möglichkeit mit einem normalen Programmer das zu bewerkstelligen?
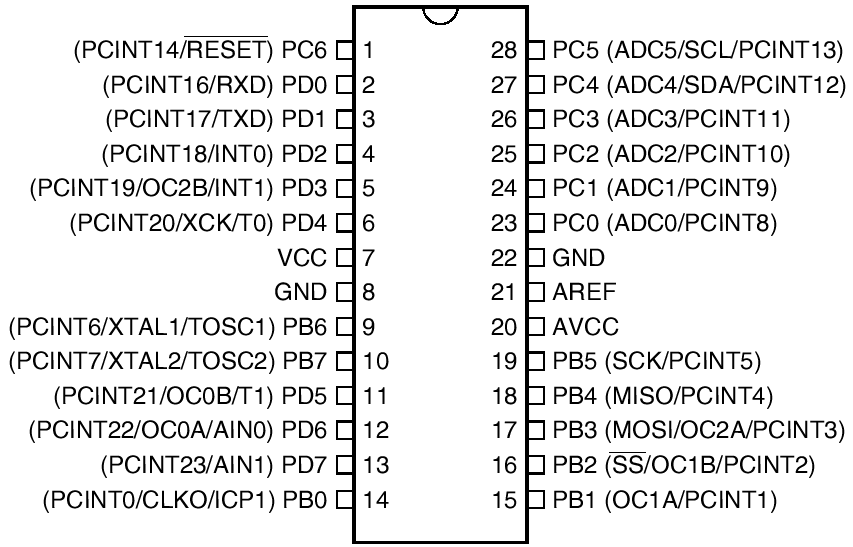
Über SPI geht das nicht, sondern über UART (="die serielle Schnittstelle"). Das sind zwei Pins, die mit RxD und TxD (manchmal auch blos Rx und Tx) bezeichnet werden. Dein Mikrocontroller hat auch sowas, Beispiel: http://wearcam.org/ece385/avr/atmega48pinout.png Pin 2 und 3. Dabei steht TxD für Transmit Data und RxD für Receive Data. Somit muss logischerweise überkreuz mit dem Computer verbunden werden (Als RxD-TxD, TxD-RxD). Nur hat dein Computer sowas nicht, bzw. nur wenn ein älterer ist und dann mit den falschen Spannungen. Da du aber einen RP6 hast, hast du auch das Adapterkabel dafür, und das ist genau so ein Adapter auf UART. Der RP6-Adapter arbeitet mit 5V, wenn dein Controller auch mit 5V arbeitet kannst du direkt verbinden: GND - GND TxD - RxD RxD - TxD Als Konsole kannst du sogar das RP6-Tool benutzen wie du es bis jetzt auch getan hast. Dabei stellt die RP6-Software die Übertragungsgeschwindigkeit auf 38400 Baud, das musst du im Controller genauso einstellen (Wie das geht oder welchen fertigen Tools es gibt hängt vom verwendeten Controller ab, den du nicht genannt hast)
{kind=link}
Oder du nimmst USB (bzw. VUSB auf AVRs ohne integriertem USB tranceiver): Beitrag "Re: einfache Datenübertragung per USB an PC von Atmega"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.