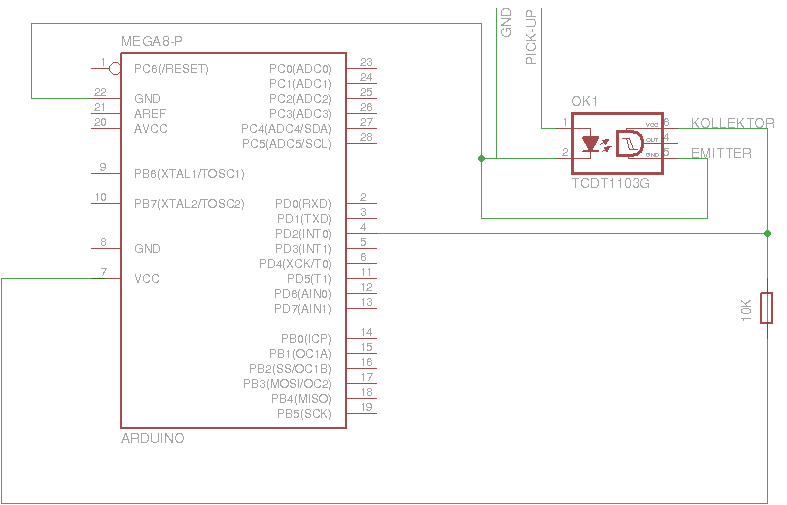
Hallo, ich habe mir vor ein paar Tagen nen DZM aus nem Arduino, nem Optokoppler und ein paar anderen Teilen gebaut. Bei meinem Roller (50ccm, entdrosselt, sonst nichts getuned) zeigt dieser aber 12000 RPM an. Das sieht mir ein bisschen viel aus, vllt stimmt auch was mit meinem Roller nicht. Na aber auf jeden Fall möchte ich wissen, ob das jetzt an meinem DZM oder an meinem Roller liegt. Schaltplan und SourceCode ist im Anhang (hab den OK, den ich hab net gefunden, auch keinen mit ähnlichen Pins, hab aber Kollektor und Emitter drangeschrieben, der in der Mitte bleibt frei (gibts bei meinem OK net)). Was sagt ihr zu dem Code und gibts ne bessere Möglichkeit, als das über das PickUp-Signal zu messen (vllt so: Beitrag "Re: Drehzahlmesser 4 mal 7-segment mit 90S2313" ?) Danke schon mal im Voraus burgerohnealles
Angehängte Dateien:
-

dzm.png
5,4 KB
Das hier
1 | ISR (INT0_vect) { |
2 | /*
|
3 | uint8_t i;
|
4 | for (i=0; i<rpm_size; i++)
|
5 | rotations[i]++;
|
6 | // */
|
7 | |
8 | rotations++; |
9 | }
|
10 | |
11 | |
12 | //
|
13 | ISR (TIMER0_COMPA_vect) { |
14 | cli(); |
15 | if (++cnt == 1000) { |
16 | rpm = rotations*60; |
17 | rotations = 0; |
ist dein Messwert-Aufnehmer-Code. Wenn die Anzahl in 'rotations' nicht stimmt, dann ist entweder * der Wert in F_CPU falsch, bzw. den µC läuft nicht mit
1 | F_CPU = 16000000 |
so wie es im makefile steht * die Berechnung zur Zeitbasis ist falsch * oder das Signal prellt wie verrückt * der Pickup liefert mehr als 1 Puls pro Umdrehung Ich hab deine Berechnungen nicht nachgerechnet aber ich hab mir mal ein paar Oszi-Bilder zum Thema "Motorrad-Pickup" bei Google angesehen. Nachdem ich die gesehen habe, halte ich die 3.te Variante für die wahrscheinlichste. Aber das kannst du zb dadurch testen, indem du anstelle des Pickup-Signals einfach mein ein bekanntes, sauberes Signal mit definierter Frequenz einspeist und nachsiehst, ob die daraus errechneten "Drehzahlen" plausibel sind.
Also F_CPU ist richtig, mein uC läuft mit 16Mhz und die Fuses sind auch korrekt. Zur 3. Variante: Das PickUp-Signal liefert immer pro Umdrehung genau zwei Pulse. Das eine ist aber negativ. Mich interessiert aber nur das Positive. Aber dadurch, dass ich einen Optokoppler verwende, wird sowieso nur der positive Impuls erkannt. Also kann es nur noch sein, dass das Signal prellt oder dass mein Roller einfach bei MaxSpeed 12000 RPM hat?
Jonathan K. schrieb: > sowieso nur der positive Impuls erkannt. Also kann es nur noch sein, > dass das Signal prellt oder dass mein Roller einfach bei MaxSpeed 12000 > RPM hat? Ich denke 12-tausend U/min können wir getrost ausschliessen. So hoch drehen ungefähr normale 10ccm Modellbaumotoren im Maximum und die wimmern dann schon so, dass man das auf Dauer nicht aushält und Mitleid mit dem Motor hat. 6 bis 7-tausend im Maximum würde ich als plausibel ansehen. Aber: probiers halt aus. Du hast einen µC, du bist dir sicher, dass deine Takteinstellung stimmt. Erzeug dir mittels delays eine entsprechende Frequenz an einem Pin und sieh nach, ob du die mit deinem µC wieder korrekt messen kannst. Dann weißt du zumindest, dass deine Auswertung korrekt ist.
Karl Heinz schrieb: > 6 bis 7-tausend im Maximum würde ich als plausibel ansehen. Ahh, laut http://www.scootertuningpage24.de/2-takt-technik/minarelli-nachbauten-sonstige-2-takt-roller/7506-ab-welcher-drehzahl-wirds-kritisch/ gehts auch bis über 10000 RPM. Mir scheints trotzdem ziemlich hoch, und wollte einfach wissen, ob mein DZM korrekt ist. Also gibts sonst noch ne Fehlerquelle?
Leg eine 50Hz Wechselspannung an den DZM an ausm Steckertrafo. Wenns 3600upm anzeigt, ist dein dzm auf 1 Impuls pro Umdrehung eingestellt. Übrigens, ich hoffe du hast den Vorwiderstand vorm Optokoppler nur vergessen einzuzeichnen..??
Karl Heinz schrieb: > Ich denke 12-tausend U/min können wir getrost ausschliessen. So hoch > drehen ungefähr normale 10ccm Modellbaumotoren im Maximum und die > wimmern dann schon so, dass man das auf Dauer nicht aushält und Mitleid > mit dem Motor hat. 6 bis 7-tausend im Maximum würde ich als plausibel > ansehen. Guzzi: max 8000 Jaosen 4-Zylinder: locker über 12.000 Formel1: über 19.000 Ich tippe auch auf einen Fehler ;)
Helge A. schrieb: > Übrigens, ich hoffe du hast den Vorwiderstand vorm Optokoppler nur > vergessen einzuzeichnen..?? Ups ja natürlich gehört da ein Widerstand hin.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.