Hallo zusammen,
ich bin gerade dabei mir zur Steuerung eines Multikamerasetups einen
Controller für das Sony LANC Kamerasteuerungsprotokoll zu bauen.
Ich habe schon einiges dazu gelesen und mir auch ein paar
implementierungen angeschaut, die aber allesamt nicht zuverlässig
funktioniert haben. Hier wird meistens mit externen Interrupts, timern
und manchmal ganz schlimm mit blockierenden delay's gearbeitet.
Wenn ich mir das Protokoll aber so ansehe
(http://www.boehmel.de/lanc.htm) dann ist das doch nichts anderes als
ein invertiertes UART mit 9600 Baud. So versuche ich das gerade auch auf
einem ATmega8 zu realisieren: zunächst möchte ich nur mal den
Kamerastatus empfangen. Leider möchte das nicht so ganz.
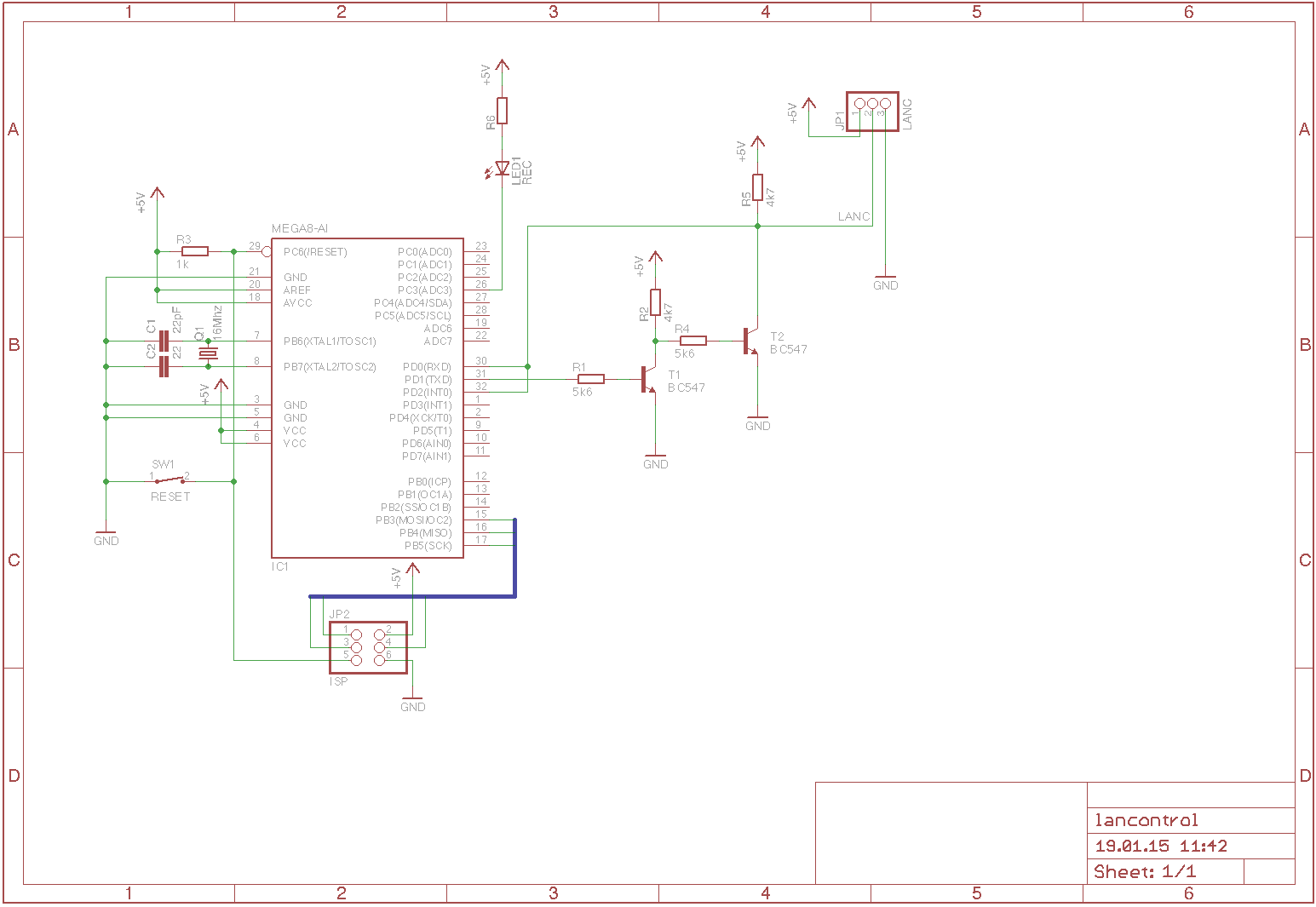
Meine Schaltung für die eindrahtige Open-Collector Verbindung incl.
Inverter siehe Anhang.
Mein AVR läuft mit 16Mhz und externem Quarz.
Hat jemand eine Idee? Ich bekomme rein gar keinen RX Interrupt und
leider habe ich keinen LA zur Hand.
Vielen Dank!
Update: ich bekomme sehr wohl den Interrupt, aber nur wenn ich TX nicht
mit dem Controller verbinde !? Und zwar ganz egal welchen Leitungspegel
ich an TX rausgebe. Klar, wenn ich die Leitung auf Masse ziehe bin ich
ja dran mit Senden, aber sonst?
Jetzt bekomme ich zwar fleißig die Interrupts, und mein LANC Wort füllt
sich auch, aber den Rec State bekomme ich nicht zu sehen. Die Kamera
sendet ihn aber definitiv.
emc2 schrieb:
Deine ganze Schaltung beruht auf einem Denkfehler. Ja, LANC ist
gegenüber RS232 invertiert, soweit ist das richtig. *ABER:* Auch die
UART ist gegenüber RS232 invertiert. D.h.: deine Schaltung darf NICHT
invertieren.
Deine ganze Schaltung ist also komplett überflüssig und durch eine
einfache Diode und einen Widerstand zu ersetzen, deren einzige Aufgabe
es ist, den TX-Ausgang zu einem "open collector" Ausgang zu machen. Etwa
sowas:
Pullup
--|===|-----o V+
|
RX o------------*
|
TX o------|<----*------------o LANC
GNDo-------------------------o GND
So, nun, es hat ein bisschen gedauert, bis ich mich dem Projekt vor ein
paar Tagen wieder widmen konnte ;-).
Hardware ist klar soweit und ich bewege mich erstmal noch nur auf der
Empfangsseite: ich möchte nur ein paar Statusbytes der angeschlossenen
Kamera auslesen.
Das Empfangen eines 8byte LANC Frames klappt nun auch, das habe ich
soweit getestet. Ich habe nun das Problem, dass die Bedingung in meiner
Hauptschleife, die ein byte auf einen bestimmten Wert hin überprüft nie
zutrifft:
1
if(lanc[4]==0xEB)
2
PORTC&=~(1<<PC5);
(sollte dann eine LED schalten, die auch an sich funktioniert)
Ich kann nun aber mit sicherheit sagen, dass 0xEB in lanc[4] drinstehen
müsste: zum einen ist das 4. byte meines Quellsignals aus der Kamera mit
diesem Wert belegt (Logic analyzer) und zum anderen kommt auch genau
0xEB raus, wenn ich lanc[4] über den UART kurz vorher wieder ausgebe
(ebenfalls durch Logic analyzer verifiziert):
1
while(!(UCSRA&(1<<UDRE)));
2
UDR=lanc[4];
Der Wert in dem Byte ist im Quellsignal auch konstant, weshalb es nicht
sein kann, dass er sich durch den RXC interrupt in der Zwischenzeit
ändert.
Auch Vergleiche mit anderen Bytes, die immer 0xFF sind klappen so nicht.
Ich habe den Wert schon invertiert, die Bitreihenfolge umgekehrt, etc.
alles ohne erfolgreichen Vergleich. Ich habe das Gefühl irgendwie liegt
der Fehler am Vergleich an sich. Hat vielleicht jemand eine Idee
diesbezüglich?
Anbei noch der gesamte Code. Vielen Dank!
Nachtrag:
selbst wenn ich die interrupts ausschalte und unmittelbar vor dem
Vergleich lanc[4] manuell auf 0xEB setze, wird die Bedingung nicht
ausgeführt. Ich verstehe das nicht.
Da ich in genau diesem Byte entweder 0xEB oder 0xFB drinstehen habe,
ergibt dies genau eine Änderung des 3. Bits, an besagtem Portausgang ist
aber keinerlei Pegeländerung auszumachen.
Dass lanc[4] den richtigen Wert enthält habe ich noch mal ausgiebig
verifiziert (direkte Ausgabe über den UART Tx), ansonsten hat sich an
obigem Code nichts geändert.
Ich bin gerade wirklich etwas verzweifelt damit und wäre über eine
Hilfestellung sehr froh!
emc2 schrieb:> Ich bin gerade wirklich etwas verzweifelt damit und wäre über eine> Hilfestellung sehr froh!
Vermutlich wäre es das einfachste, erstmal mit HTerm am PC deine
Theorien zu verifizieren. Dazu brauchst du, weil dein PC evtl. keine
echte serielle Schnittstelle mehr hat, einen USB-Seriell Adapter und
einen Pegelwandler (Max232), der die das gleiche Signal erzeugt, wie der
AVR. Und nun noch dein Dioden-Interface.
Sprich dann erstmal mit der Kamera und schau, was sie wirklich sendet.
Das mit dem Dioden Interface sollte gut klappen, ich habe vor einiger
Zeit auf die gleiche Art das Protokoll der JVC Data Battery's geknackt.
Du kannst auch ein LCD an den AVR andocken und dir anzeigen lassen, was
da nun wirklich aus Sicht des AVR ankommt, aber das dauert vermutlich
länger, als die PC Nummer. Zu sehen, was wirklich passiert ist immer
besser als auf Vermutungen das Programm aufzubauen.
LANC ist aber auch nicht schön ;-(
Wo hast du das Timing berücksichtig? Woher willst du wissen ob der
Controller sich nicht verschluckt hat? Also das jetzt Lanc[4] an
Rx[4+-x] steht?
Teste doch erstmal ob überhabt einmal dein Rec-Status gelesen wird.
while i<7 && Led_flag!=1
if lanc[i]=0xEB;
PORTC |= (1<<PC5);
Led_flag=1;
end;
i++;
end
...
Wenn ja schalte deine Debug LED an und blockier diese Abfrage für ein
paar Sek
Viel Erfolg
G Termi
Ps: syntax ist Müll :-)
Nun, lanc lässt nach einem Frame a 8 Bytes eine längere Pause. Ich
resette also nach jedem empfangenen Byte meinen Timer0, den ich so
vorgeladen habe, dass in der langen Pause der Overflow interrupt kommt.
Der setzt mir dann ein Flag, dass das nächste Byte der Beginn eines
neuen Frames ist.
Die ankommenden Daten habe ich schon in aller Kleinlichkeit geprüft: ich
gebe mit folgender Hauptschleife den gerade eben Empfangenen Frame
wieder übers UART aus:
1
while(1)
2
{
3
if(framecomplete)
4
{
5
uint8_ti;
6
for(i=0;i<8;i++)
7
{
8
while(!(UCSRA&(1<<UDRE)));
9
UDR=lanc[i];
10
}
11
framecomplete=0;
12
}
13
}
(die framecomplete Variable ist im vollständigen code weiter oben noch
nicht drin, hab ich eben erst eingeführt). Da mein USB Seriell Wandler
kaputtgegangen ist, guck ich mir nun das LANC Eingangssignal und den
Output des UARTs mit meinem Logicanalyzer an (siehe Anhang) und siehe
da, die Daten, die aus dem UART rauskommen entsprechen exakt dem was
reingeht.
Sobald ich aber nun eines dieser Bytes manuell auf seinen Wert hin
prüfen möchte, trifft die Bedingung NIE zu (was ich oben schonmal
geschildert habe)
Hä? Nö!
Aber als dashier auch nicht zutraf wurde ich gerade doch sehr stutzig:
1
charx=0xEB;
2
if(x==0xEB)
3
...
ändere ich den Datentyp in ein uint8_t, ist alles in Ordnung. So
funktioniert auch mein ganzer obiger code, wenn das lanc Array ein
uint8_t array und nicht wie von mir ursprünglich ein char Array ist.
Aber das verstehe ich nicht. Nach allen guten C Geistern ist doch ein
char genau ein Byte!? Was geht denn da schief?
Okay, böse Falle. Mir war nicht klar, dass beim avr-gcc ohne
-funsigned_char ein einfacher 'char' signed ist... das erklärt natürlich
so einiges...
Dann mache ich mich jetzt mal ans Senden ;-)
nun, mein Senden klappt noch nicht ganz und ich habe auch eine Vermutung
warum: wenn ich mit der Schaltung oben von c-hater sende, wird bei einer
1 der Bus nie ganz auf low gezogen, sondern c.a. 1,2V darüber. Ich gehe
davon aus, dass das mit der Durchlassspannung der Diode zusammenhängt.
Wenn ich ein probietäres LANC Steuerungsgerät messe, zieht es beim
senden den Bus ganz runter. Wie kann ich das auch erreichen?
emc2 schrieb:> sondern c.a. 1,2V darüber.
Dann hast du aber eine ganz schlechte Diode erwischt, das sollten
höchstens so 0,7 Volt sein. Am besten ist ein Open Drain Ausgang am
Sender in Form einen kleinen MOSFet, wie den BS170. Dummerweise braucht
der, um den Ausgang auf Masse zu ziehen, ein positives Signal am Gate,
so das du TX doch nochmal invertieren musst. Oder du nimmst zwei Gatter
eines 74HC(T)06, der 6 invertierende Treiber mit Open Drain beinhaltet.
Oder ein Gatter eines 74HC(T)07.
Übrigens sendet die Kamera 2 Stopbit, das solltest du evtl. auch machen.
können auch c.a. 0,7V gewesen sein, auf dem Oszi ist das immer nicht so
ganz genau ablesbar...
Das mit den zwei Stopbits ist mir auch aufgefallen, sollte aber egal
sein, da ich ja zwei einzeln getriggerte bytes sende. Aber habs der
vollständigkeit halber angepasst.
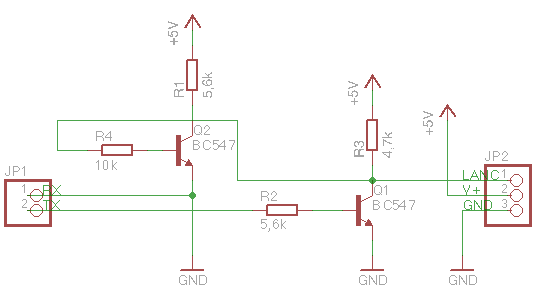
Mangels MOSFET habe ich mir nun schnell mal einen Open collector mit
einem BC547 gebaut und noch so einen als zusätzlichen Inverter davor.
Wunderbar, die Kommunikation läuft nun einwandfrei! Vielen Dank.
Ein Problem gibt es noch: wenn T2 länger als c.a. 100ms durchschaltet
(z.B. durch längeres Low auf dem TX pin, oder trennen der TX Leitung)
bricht die ganze Versorgungsspannung auf c.a. 2,3V ein und der µC kommt
damit natürlich nicht mehr hoch. Die Spannungsversorgung erfolgt
komplett durch die V+ Leitung des LANC ports der Kamera.
Ich denke ich belaste die Kamera in diesem Falle zu stark mit dem Strom,
der in besagtem Falle durch T2 und R5 fließt. Ich habe auch schon
versucht den Lanc Pullup (R5) zu vergrößern, hat aber nicht geholfen. Im
Normalbetrieb, wenn T2 nur mal für eine Bitdauer durchschaltet ist alles
in Ordnung, spätestens aber beim Reset des Controllers (oder
dementsprechend auch beim Programmieren) ist es vorbei...
Hat da jemand eine Idee, wie ich das lösen kann? Die Schaltung soll auch
im Endeffekt von der Kamera versorgt werden.
emc2 schrieb:> Hat da jemand eine Idee, wie ich das lösen kann?
Du sorgst mit einem z.B. 5,6k Pullup an PD1 (TXD) des MC dafür, das bei
undefiniertem Portpin T2 sicher sperrt.
emc2 schrieb:> Das mit den zwei Stopbits ist mir auch aufgefallen, sollte aber egal> sein, da ich ja zwei einzeln getriggerte bytes sende. Aber habs der> vollständigkeit halber angepasst.
Wenn du mal längere Sequenzen sendest, kann es sein, das die Kamera das
2te Stopbit als Verarbeitungszeit braucht, das wird bei DMX z.B. genauso
gemacht.
Wenn du mir per PM deine Email-Adr schickst, kann ich dir meinen
LANC-Schaltplan schicken. ich hatte auch ein paar Probleme damit und im
Netz damals was gefunden... Finde ich aber auf die Schnelle momentan
nicht. Ich habe mir den ganze Tüddelkram mit FETs geschenkt und einfach
nur zwischen Rx/Tx einen 560Ohm R gehangen, läuft zumindest bei mir ohne
Probleme.
Und Vorsicht bei meiner Sony kommen bis zu 8V aus dem LANC-VCC