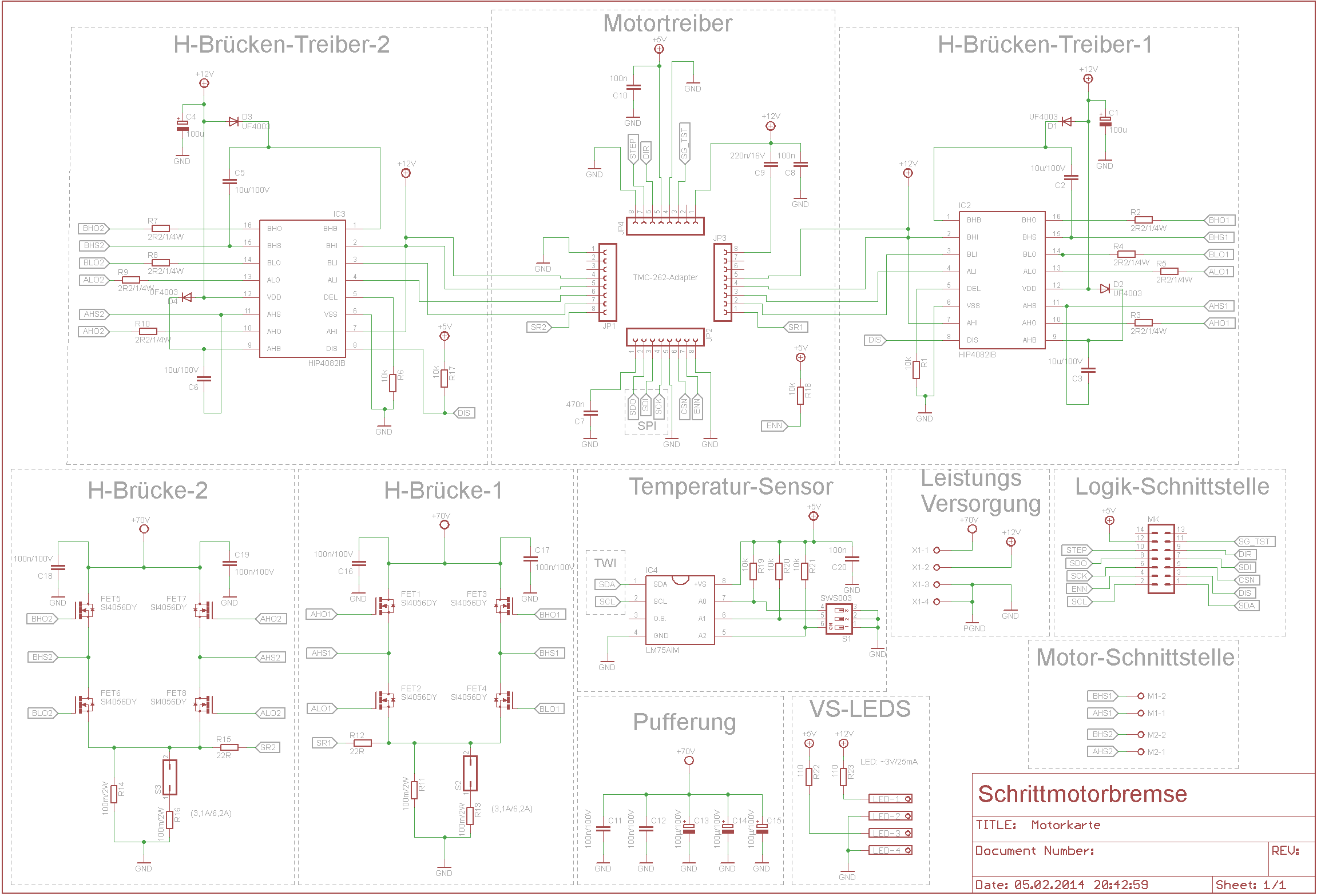

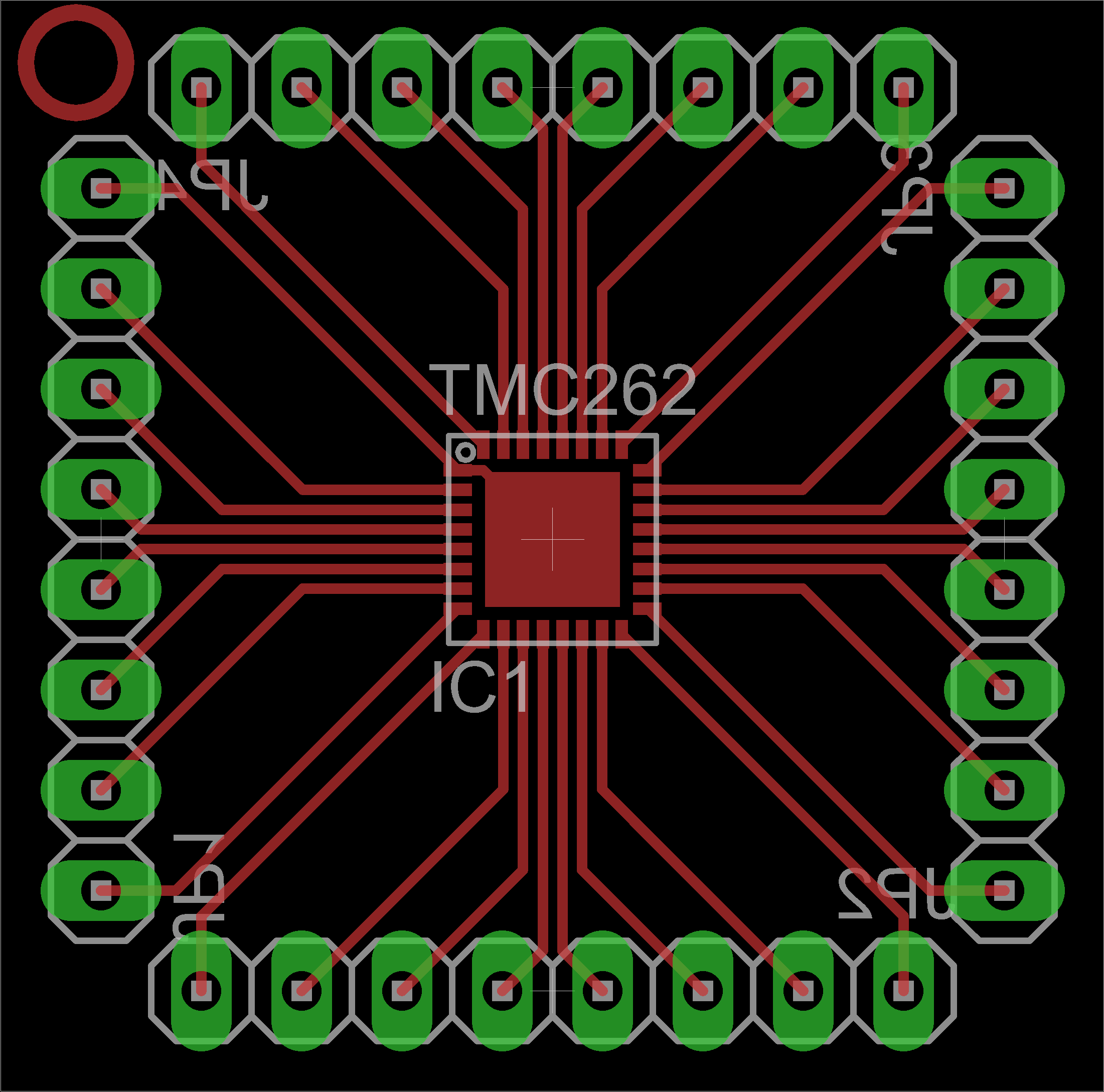
Hallo, bin im Zuge meiner Diplomarbeit damit konfrontiert eine Schrittmotorsteuerung zu entwerfen/ aufzubauen. Hab die Schaltung samt Platine welche auf einem TMC262 mit externen Mosfet-Treibern beruht gerade fertig gestellt und würd mich freuen wenn Ihr mir den einen oder anderen Tipp bezüglich EMV-Verträglichkeit und Funktionalität geben könntet. Da mir mehr oder weniger nur eine "Hobbyküche" zur Verfügung steht, hab ich mich dazu entschlossen den TMC-262 (QFN-32-Gehäuse) auf einer seperaten Platine im Reflowofen zu löten und den dann nur aufzusockeln. Auch ist es absicht dass alle Stecker nur vom Bottom-Layer aus verbunden sind, da ich die Durchkontaktierungen mit eingelöteten Drahtstücken realisieren muss (und die Steckverbindungen auf am Bauteillayer sein sollten). Eckdaten: Schrittmotor mit bis zu 5A/ 70V (Chopperbetrieb) Temperatursensor über TWI MOSFET's über Platine gekühlt (SO-8) Würd mich über Antworten freuen. MFG Michi
Angehängte Dateien:
-

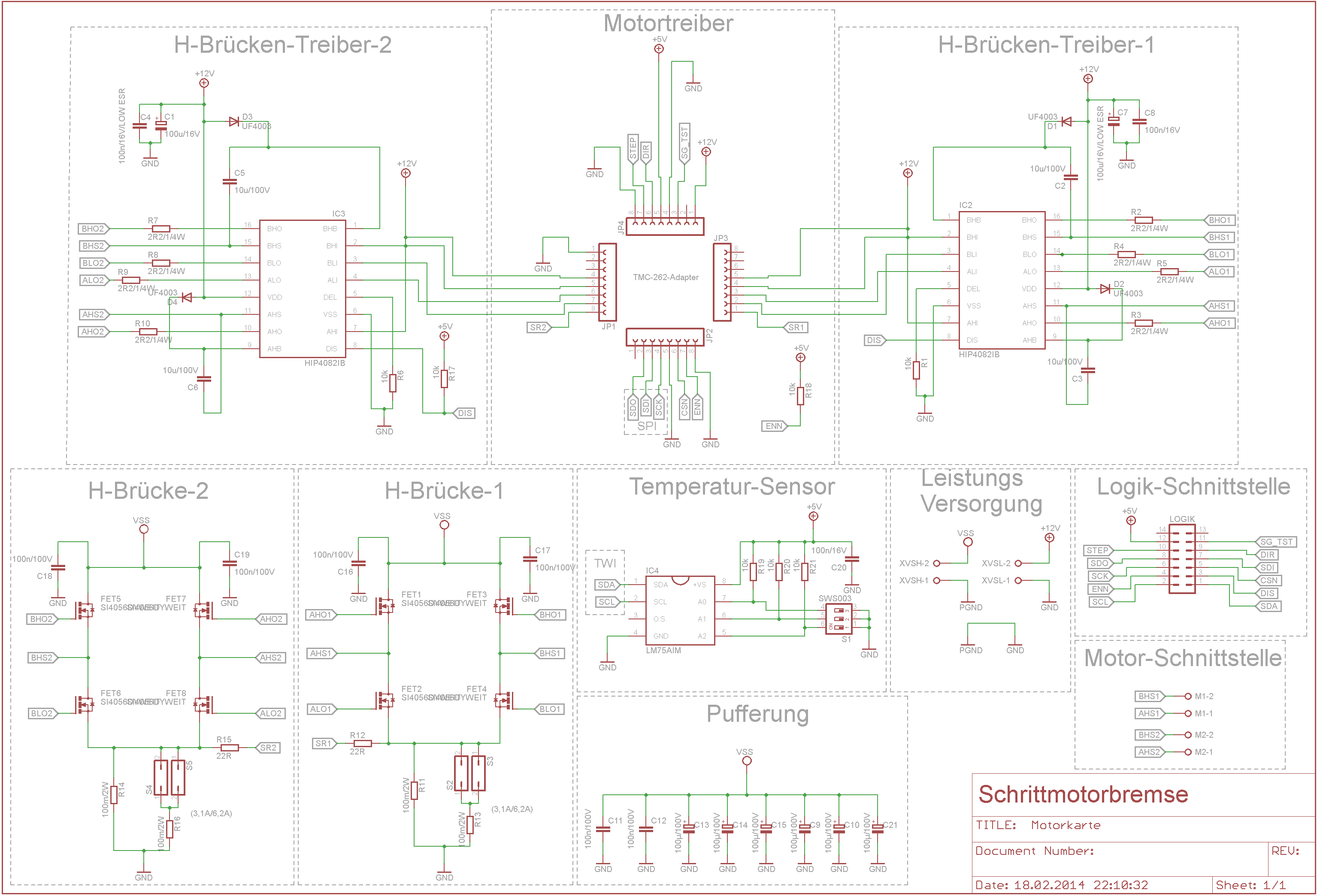
motorkarte-schematisch.png
48 KB -

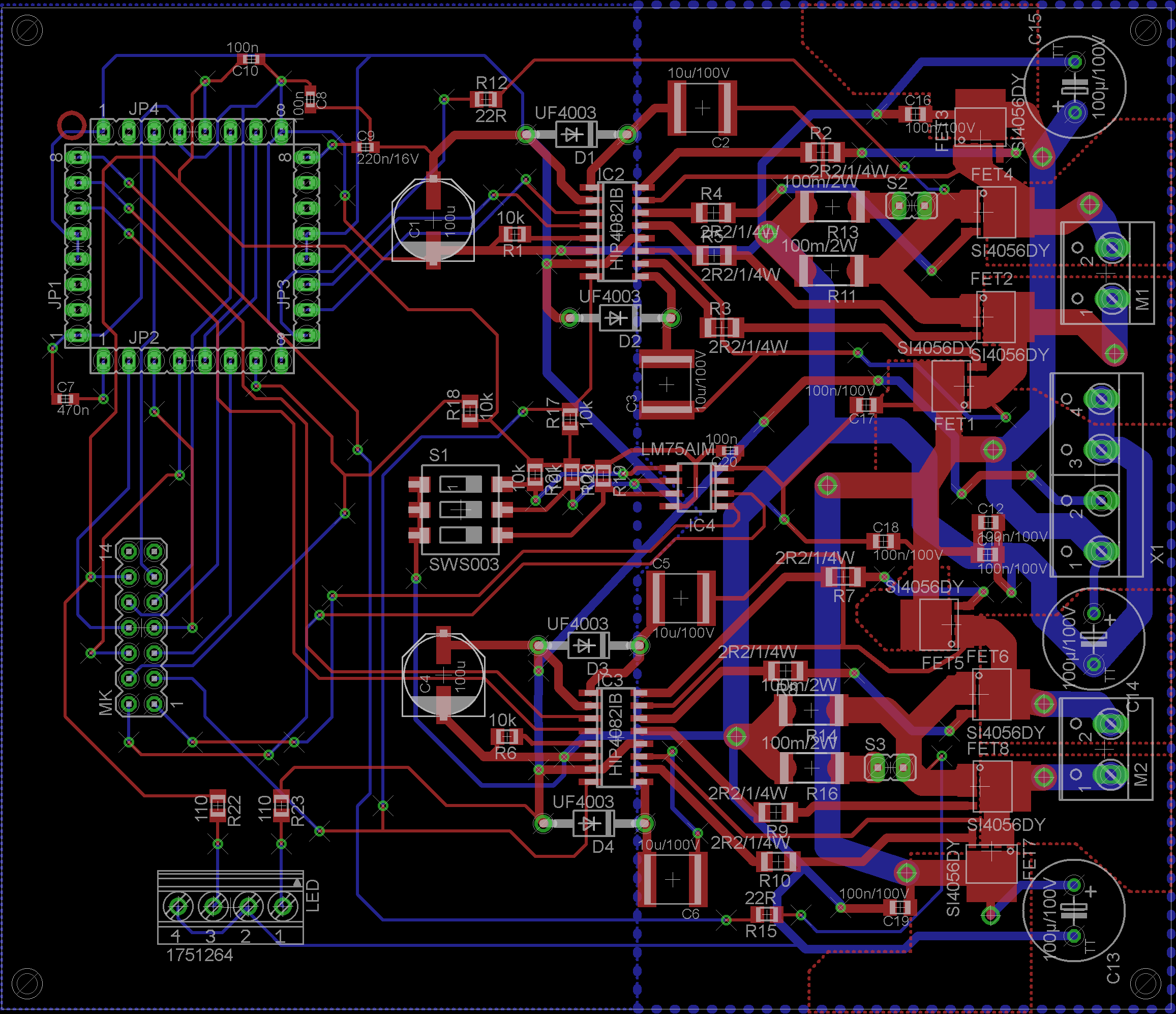
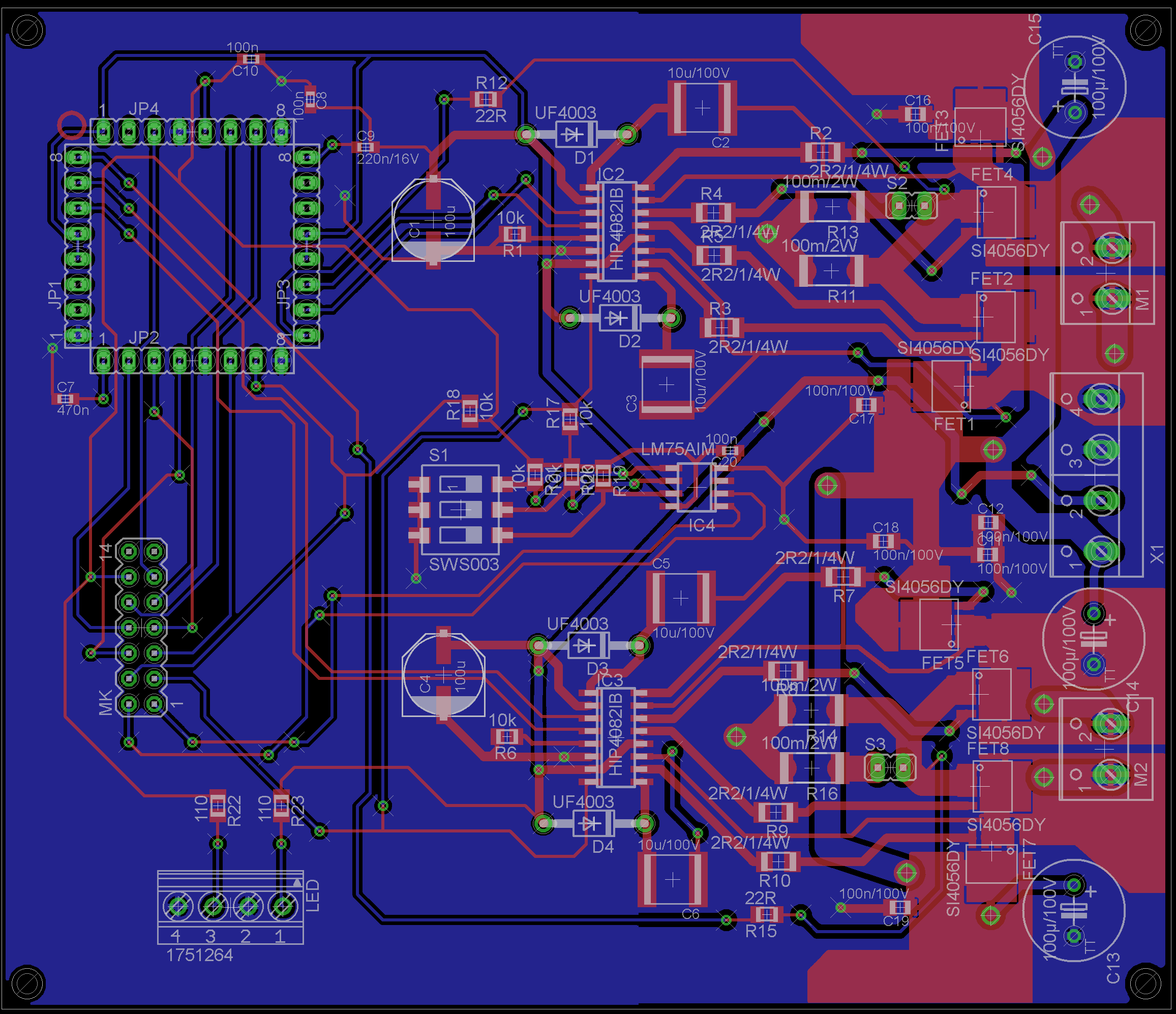
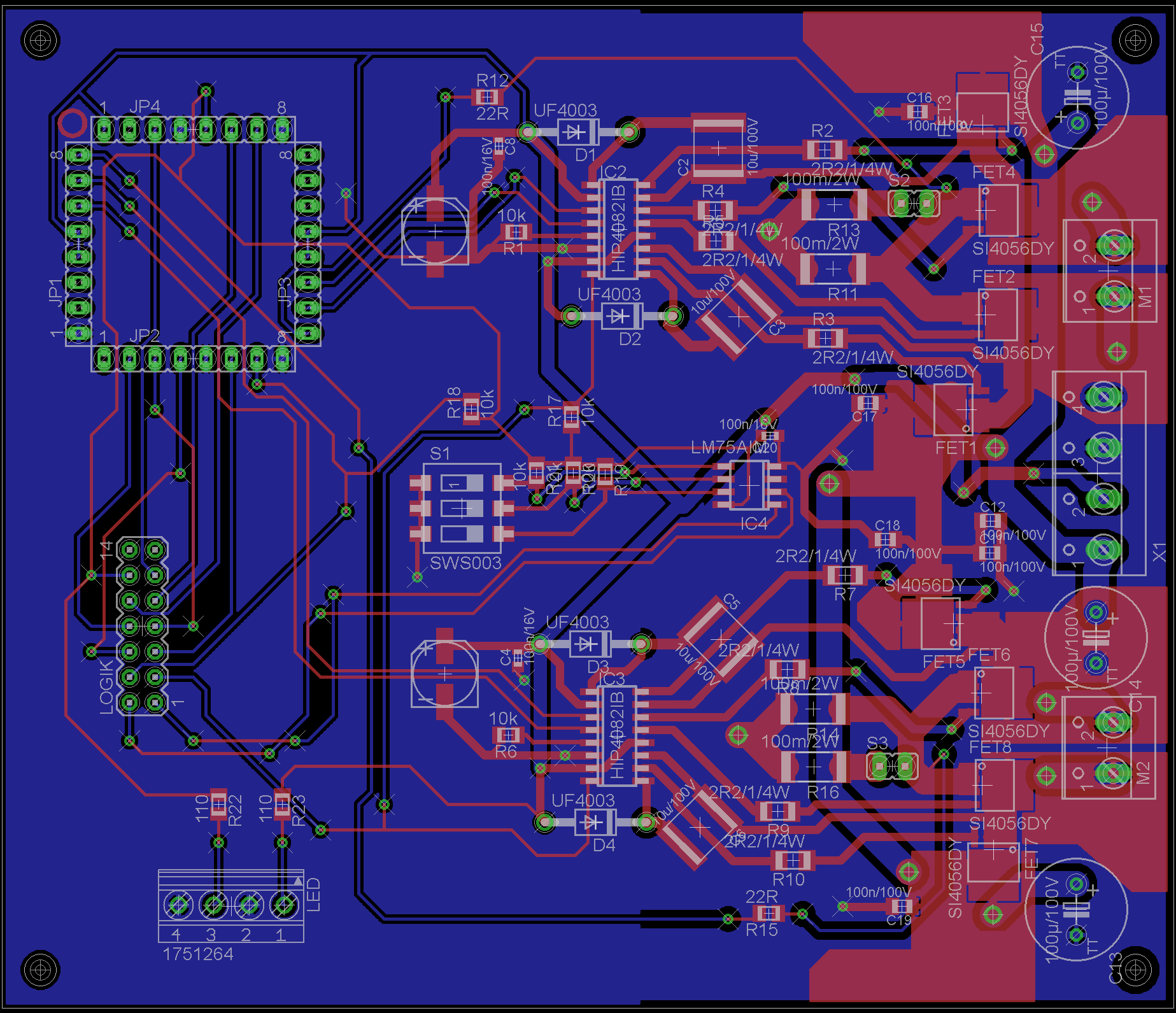
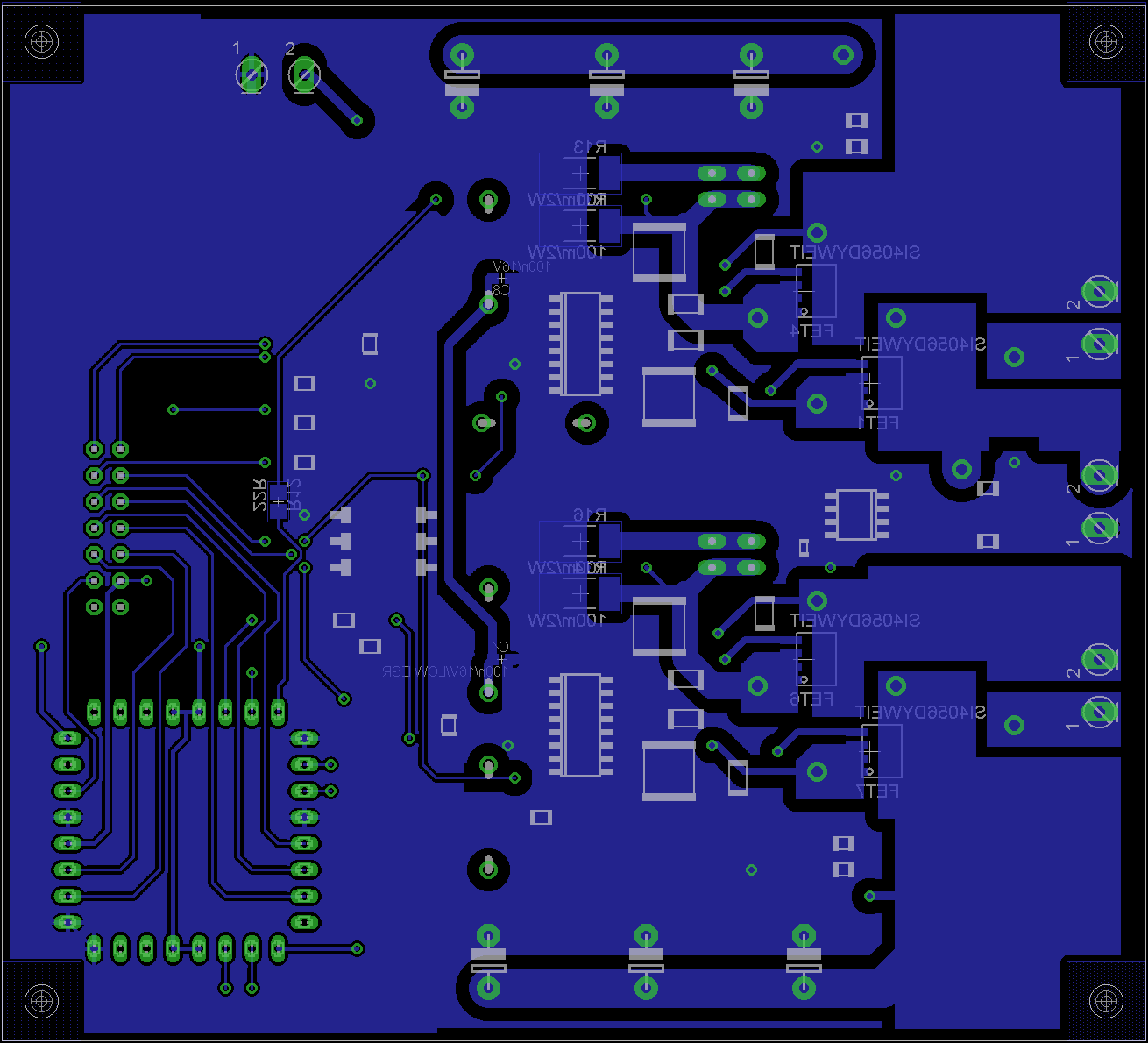
motorkarte-board-nackt.png
160 KB -

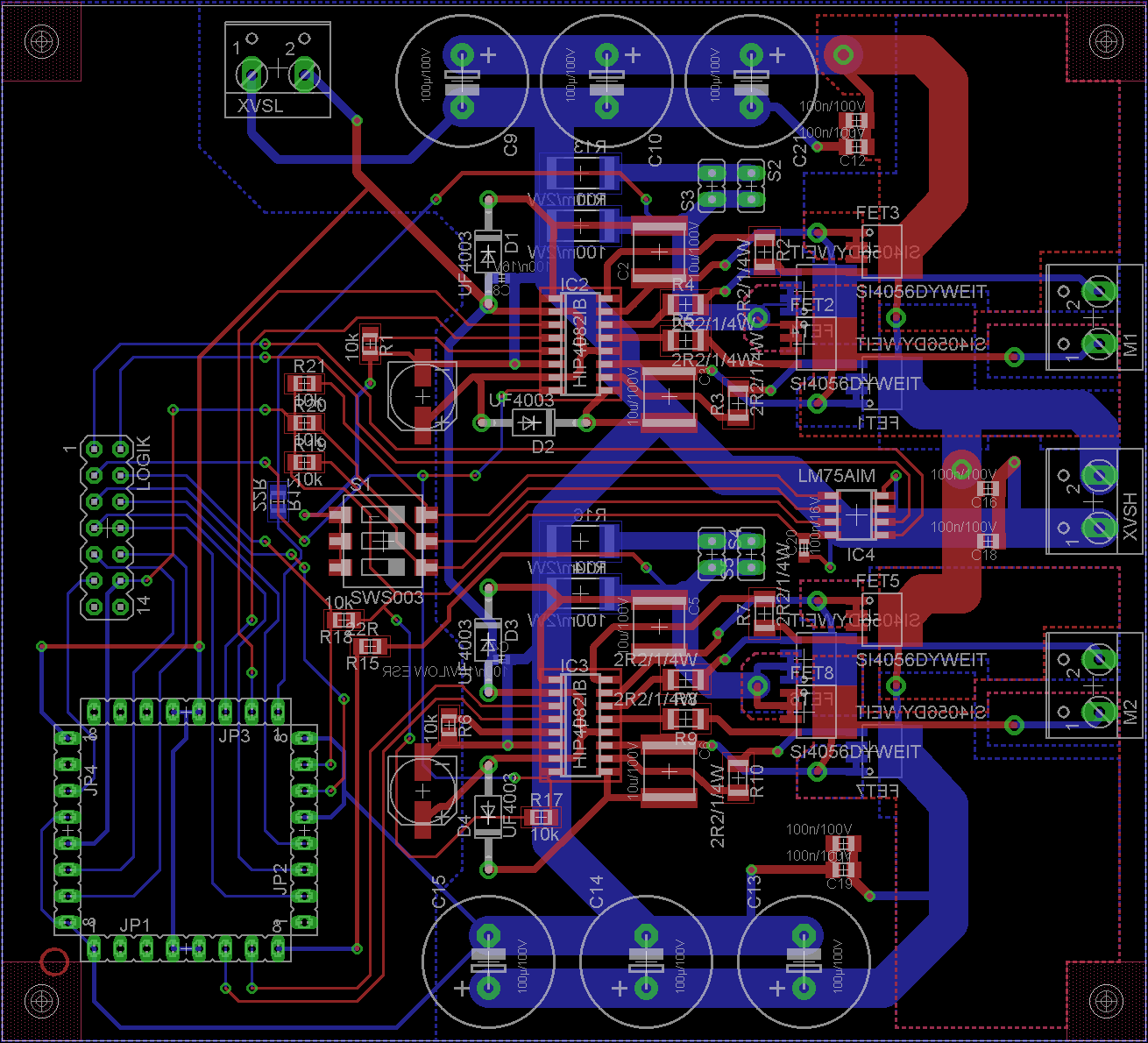
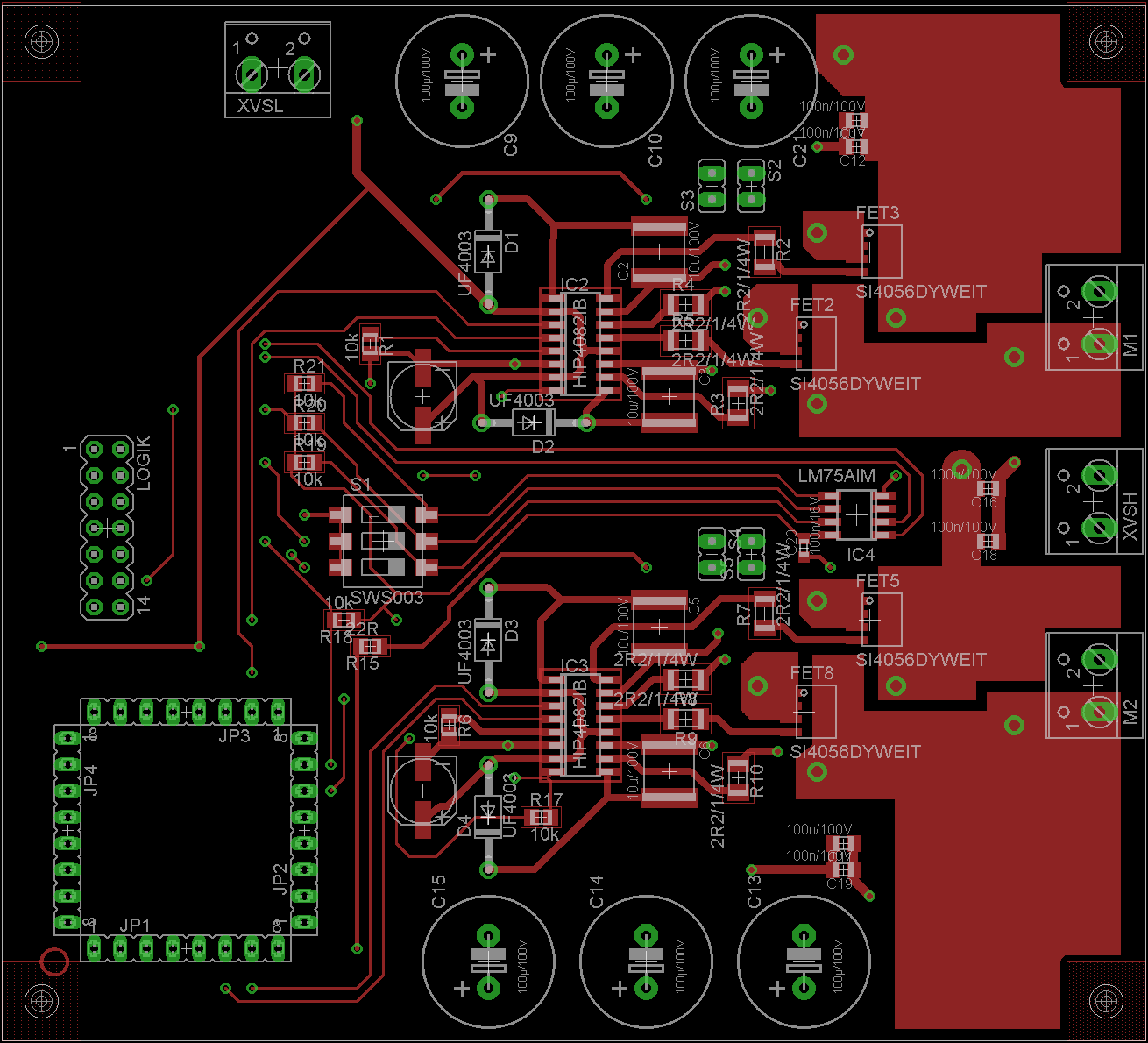
motorkarte-board.png
160 KB -

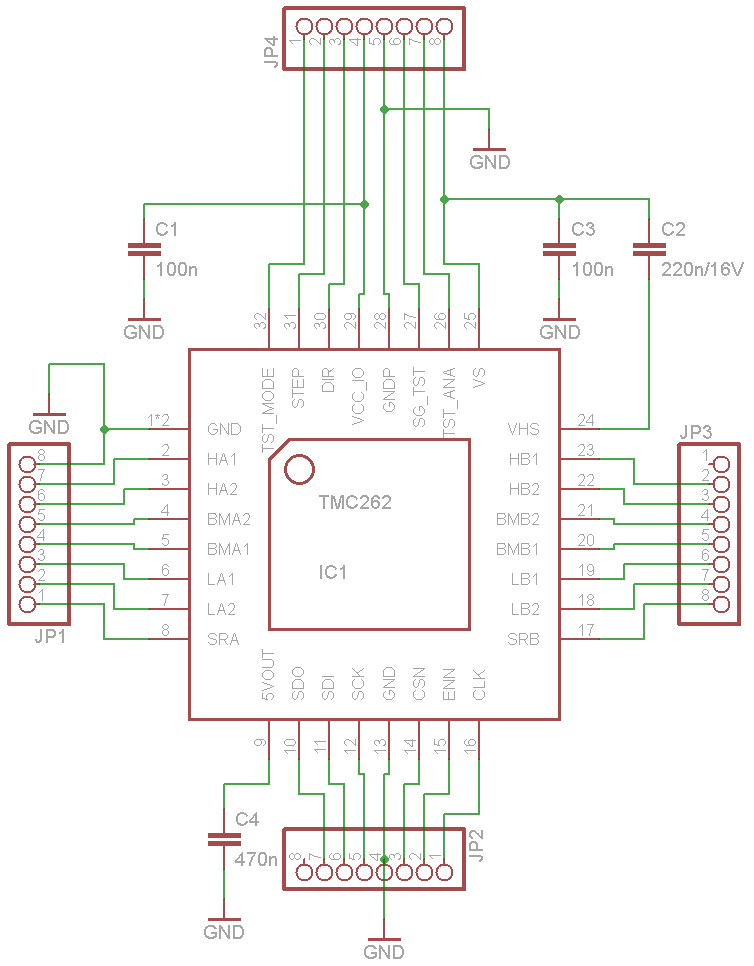
TMC-Adapter-schematisch.png
25 KB -

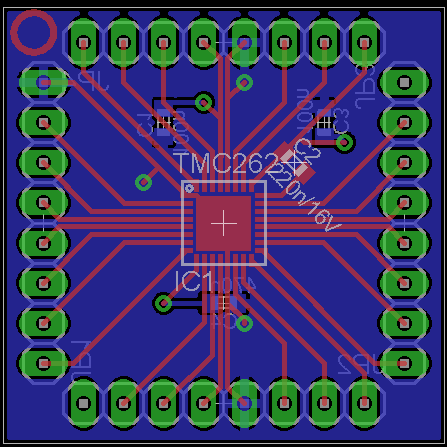
TMC-Adapter-board.png
58 KB
Macht schon mal nen guten Eindruck. Einige Vias kann man sparen, wenn man ohnehin ein THT-Pin in der Nähe hat der zum Netz gehört. Bsp. C7
Hast du mal die Abstände bzgl. der Spannung nachgemessen? ergo Mindestabstände ?
Hm, die Caps mit 10µ/100V haben ganz schön dünne Leiterbahnen, kenn die Funktion aber nicht. Befstigungslöcher so weit außen? Stabilität? Warum nicht ein paar der SMD-Widerstände nach unten, und als Drahbrücken verwenden. Beim TMC-262 da geht doch ohne Mühe noch 1/4 bis 1/3 der Fläche weg. Entkoppelcaps vom TMC am besten direkt auf die Adapterplatine. Der LM75 scheint mir ein wenig weit von den Mosfets weg, ob die nicht schon ... sind wenn der LM75 die Übertemperatur feststellt. Warum kein prof. Platine? Vorgabe vom Prof? ( So teuer sind die nun wirklich nicht mehr ) mfg Gast
Moin, vielen dank für die ganzen Verbesserungsvorschläge. EE schrieb: > Hast du mal die Abstände bzgl. der Spannung nachgemessen? ergo > Mindestabstände ? Hab das bis jetzt eher hingeschätzt. Im Forum hab ich was über Mindestabstände gefunden, blick da aber überhaupt nicht durch. Immerhin hab ich ja auch recht starke Stromspitzen, durch den Chopperbetrieb. Hab bei der Massefläche eine Isolation von 0,609mm eingestellt. Da Vorraussichtlich kein Lötstoplack drüber kommt sollte ich die Abstände villeicht doch ein bissl größer wählen. Auf was für Abstände sollte ich da ca. achten? Gast schrieb: > die Caps mit 10µ/100V haben ganz schön dünne Leiterbahnen, kenn die > Funktion aber nicht. Das sind Bootstrap-Kondensatoren für den High-Side-Treiber (der kann maximal 1A). Ich denk da brauch ich keine dickeren Leiterbahnen oder? Gast schrieb: > Befstigungslöcher so weit außen? Stabilität? An das hab ich gar nicht gedacht. Ist mein erstes Board :-) Gast schrieb: > Warum nicht ein paar der SMD-Widerstände nach unten, und als Drahbrücken > verwenden. Wie schon gesagt, da das mein erstes Board ist hab ich auch das noch gar nicht in betracht gezogen. Werd ich mir auf jeden Fall mal anschaun. Gast schrieb: > Beim TMC-262 da geht doch ohne Mühe noch 1/4 bis 1/3 der Fläche weg. Da versteh ich nicht ganz was du damit meinst. Gast schrieb: > Entkoppelcaps vom TMC am besten direkt auf die Adapterplatine. Die Überlegung hatte ich auch schon, hab sie aber wegen des geringen Platzes dann wieder verworfen. (sollte aber kein Problem sein, wenn ich die caps direkt unter den TMC plazier) Gast schrieb: > Der LM75 scheint mir ein wenig weit von den Mosfets weg, ob die nicht > schon ... sind wenn der LM75 die Übertemperatur feststellt. Die Befürchtung hab ich auch. Is beim Layouten so entstanden, weil ich am Anfang total auf den vergessen hab. Sollt ich villeicht noch mal überarbeiten. Gast schrieb: > Warum kein prof. Platine? Vorgabe vom Prof? > ( So teuer sind die nun wirklich nicht mehr ) Eher eine eigene Vorgabe ;-). Wir haben bei uns die Möglichkeiten sowas zu machen und wollten die Nutzen. Man muss aber auch sagen das wir am Anfang nicht gedacht haben dass das ganze mehr oder weniger so ausartet ("komplex" wird). MFG Michi
Gib doch mal die Daten der Leiterkarten bei PCB-Pool im online Kalkulator ein. Der spuckt dir dann gleich den Preis aus. Kannst dir ja dann immer noch überlegen ob du die Durchkontaktierungen selber machen willst.
Ich würde die Bootstrap Kondensatoren kürzer und mit breiteren leiterzügen an den HIP anbinden. Über diesen Zweig laufen die Gateströme der Higside FET's. Dazu z.B. C2 um 90° drehen und die Leitung richtung R2 drunter durchführen. Die Versorgung der HIP's solltest du kurz vor dem Schaltkeis noch mal mit ~100nF MLCC abblocken. Die kleinen SMD Elkos haben zuweilen einen recht hohen ESR und Gatetreiber reagieren manchmal komisch auf einbrüche der Versorgung während des Schaltvorgangs.
:
Bearbeitet durch User
Hm, > die Caps mit 10µ/100V haben ganz schön dünne Leiterbahnen, kenn die > Funktion aber nicht. >Das sind Bootstrap-Kondensatoren für den High-Side-Treiber (der kann >maximal 1A). Ich denk da brauch ich keine dickeren Leiterbahnen oder? Hab ich es doch gewußt, so dicke Kerko Klopper sind da nicht ohne Grund drin, die sollen arbeiten! Also wie auch Olvier P. schrieb dicke Leiterbahnen. > Beim TMC-262 da geht doch ohne Mühe noch 1/4 bis 1/3 der Fläche weg. >Da versteh ich nicht ganz was du damit meinst. Naja, das Layout sieht unten links so leer aus, da kann man gut was optimieren an Fläche. > Warum kein prof. Platine? Vorgabe vom Prof? > ( So teuer sind die nun wirklich nicht mehr ) >Eher eine eigene Vorgabe ;-). Wir haben bei uns die Möglichkeiten sowas >zu machen und wollten die Nutzen. Man muss aber auch sagen das wir am >Anfang nicht gedacht haben dass das ganze mehr oder weniger so ausartet >("komplex" wird). Kenne die Möglichkeiten nicht, die du genau hast ( Lötstoplack / verzinnen ... ) Würde hier einfach mal ein fertiges Layout auf eine Platine werfen und ein paar Bauteile drauf bestücken ob das wirklich so schön geht... ( So einfach mal ein paar S0-16 Package und ein paar Widerstände ) Im Datenblatt sind übrigens ein paar Layoutregeln und ein Layoutvorschlag zu finden .... mfg Gast
>...(der kann maximal 1A)...
Können, kann der HIP mehr als 2,5A und bei 2,2Ohm Gate Vorwiederstand
wird der auch. Zwar nur kurz aber aber mit Sicherheit.
(Vll. erhöhst du die Widerstände noch ein wenig. So auf 10Ohm.)
Das Problem ist dass die Treiber manchmal richtige kleine Diven sein
können.
Wenn, durch zu hohe Induktivitäten in deren Versorgung, die Versorgung
am Schaltkreis zu weit einbricht passieren die tollsten Sachen. Da
stirbt der Treiber oder die FET's qualmen ab und man fragt sich warum.
Vor einiger Zeit hab ich mich mit dem Bau von Class-D Verstärkern
beschäftigt und konnte so einiges an Erfahrung mit solchen
Treiber-FET-Kombinationen sammeln. Für diese Erkenntniss haben dann auch
einige Bauteile das zeitliche gesegnet (friede ihrer Asche).
Also tuh dir und dem Treiber einen Gefallen und gib ihm eine gute und
vor allem ESR- und induktionsarme Versorgung.
Moin, Oliver P. schrieb: > Ich würde die Bootstrap Kondensatoren kürzer und mit breiteren > leiterzügen an den HIP anbinden. Über diesen Zweig laufen die Gateströme > der Higside FET's. Dazu z.B. C2 um 90° drehen und die Leitung richtung > R2 drunter durchführen. Stimmt, hab die jetzt gleich als Überbrückung genommen. Wegen der Breite sollten 0,8mm bei 1,25A Peak ausreichen oder? Oliver P. schrieb: > Die Versorgung der HIP's solltest du kurz vor dem Schaltkeis noch mal > mit ~100nF MLCC abblocken. Die kleinen SMD Elkos haben zuweilen einen > recht hohen ESR und Gatetreiber reagieren manchmal komisch auf einbrüche > der Versorgung während des Schaltvorgangs. Hab die Versorgungscaps von den HIP's durch low-ESR-Elkos ersetzt (24mOHM) und noch jeweils einen 100nF Kerko parallel geschalten. Bin mir mit den LOW-ESR-Dingern noch recht unsicher, bzw. versteh ich noch nicht so ganz wann und wo man die einsetzt. Gast schrieb: > Kenne die Möglichkeiten nicht, die du genau hast ( Lötstoplack / > verzinnen ... ) > Würde hier einfach mal ein fertiges Layout auf eine Platine werfen und > ein paar Bauteile drauf bestücken ob das wirklich so schön geht... ( So > einfach mal ein paar S0-16 Package und ein paar Widerstände ) Naja Lötstoplack verwenden wir bei uns in der Schule nicht. Platinen für SO-Bauteile sollten kein Problem sein, sowohl das ätzen als auch das löten. Gast schrieb: > Im Datenblatt sind übrigens ein paar Layoutregeln und ein > Layoutvorschlag zu finden .... Ich hab mich mit meinem Schaltungsentwurf größtenteils am Datenblatt orientiert und auch bemüht die Vorschläge beim Layouten so gut wie möglich umzusetzen. Erkennst du grobe Fehler? Oliver P. schrieb: > Können, kann der HIP mehr als 2,5A und bei 2,2Ohm Gate Vorwiederstand > wird der auch. Zwar nur kurz aber aber mit Sicherheit. > (Vll. erhöhst du die Widerstände noch ein wenig. So auf 10Ohm.) > Das Problem ist dass die Treiber manchmal richtige kleine Diven sein > können. > Wenn, durch zu hohe Induktivitäten in deren Versorgung, die Versorgung > am Schaltkreis zu weit einbricht passieren die tollsten Sachen. Da > stirbt der Treiber oder die FET's qualmen ab und man fragt sich warum. > Vor einiger Zeit hab ich mich mit dem Bau von Class-D Verstärkern > beschäftigt und konnte so einiges an Erfahrung mit solchen > Treiber-FET-Kombinationen sammeln. Für diese Erkenntniss haben dann auch > einige Bauteile das zeitliche gesegnet (friede ihrer Asche). > Also tuh dir und dem Treiber einen Gefallen und gib ihm eine gute und > vor allem ESR- und induktionsarme Versorgung. Im Datenblatt zum HIP4082 stehen 1.25A. Kanns sein dass du den mit dem HIP4080 verwechselst? Wie bereits erwähnt hab ich die Versorgungs-Elko's von den HIP's durch LOW-ESR-Typen ersetzt und noch einen 100nF-Kerko parrallel geschalten. Wie ich die Induktivität reduzieren kann bin ich mir gerade recht unsicher. Könntest du mir da villeicht noch ein paar Tipps geben. Wo ich auch noch ein wenig unsicher bin ist der Mindestabstand der Leiterbahnen bezüglich der Spannung (70V). Bei der Massefläche hab ich als Isolierung mal 0,8 eingestellt. Sollte das reichen (kein Lötstoplack). MFG. Michi
>Kanns sein dass du den mit dem HIP4080 verwechselst? Denke nicht, ich hatte mich an den Max Werten auf Seite 5 im DB orientiert. Ich geh da immer vom worst case aus. >Wie ich die Induktivität reduzieren kann... Einfach die entsprechenden Strompfade mit möglichst kurzen und breiten Leiterzügen ausführen. Irgendwo gab es hier einen sehr schönen Artikel zu diesem Thema. Ich find ihn allerdings gerade nicht. Hat jemand den Link zur Hand?
Was noch auffällt sind die, zum Teil, schmalen Leiterbahnen in der unteren Hälfte des Leistungsteils. Wie wollt ihr die Durchkontaktierungen machen? Galvanisch oder mit Draht? Wenn Galvanisch, solltet ihr im Leistungsteil mehrere Vias parallel setzen oder Bauteilpins zur Durchführung nutzen. 1 Via könnte bei 5A etwas knapp werden.
Moin. Oliver P. schrieb: > Denke nicht, ich hatte mich an den Max Werten auf Seite 5 im DB > orientiert. > Ich geh da immer vom worst case aus. Ok, stimmt. Hab mich da an dem Wert von der ersten Seite orientiert. Oliver P. schrieb: > Was noch auffällt sind die, zum Teil, schmalen Leiterbahnen in der > unteren Hälfte des Leistungsteils. Das müsste die Messleitung vom Shunt für den TMC-262 sein. (die mit dem 22OHM Widerstand) Oliver P. schrieb: > Wie wollt ihr die Durchkontaktierungen machen? Galvanisch oder mit > Draht? > Wenn Galvanisch, solltet ihr im Leistungsteil mehrere Vias parallel > setzen oder Bauteilpins zur Durchführung nutzen. 1 Via könnte bei 5A > etwas knapp werden. Die Möglichkeit einer galvanischen durchkontaktierung haben wir leider nicht. Somit bleibt uns nur die Durchkontaktierung per Draht übrig. MFG Michi
>Das müsste die Messleitung vom Shunt für den TMC-262 sein. Ich meinte die Anbindung an die großen Elkos. Oben ist die Leiterbahn breit, unten nicht. >Somit bleibt uns nur die Durchkontaktierung per Draht übrig. na dann ist die Sache ja unkritisch.
Angehängte Dateien:
-

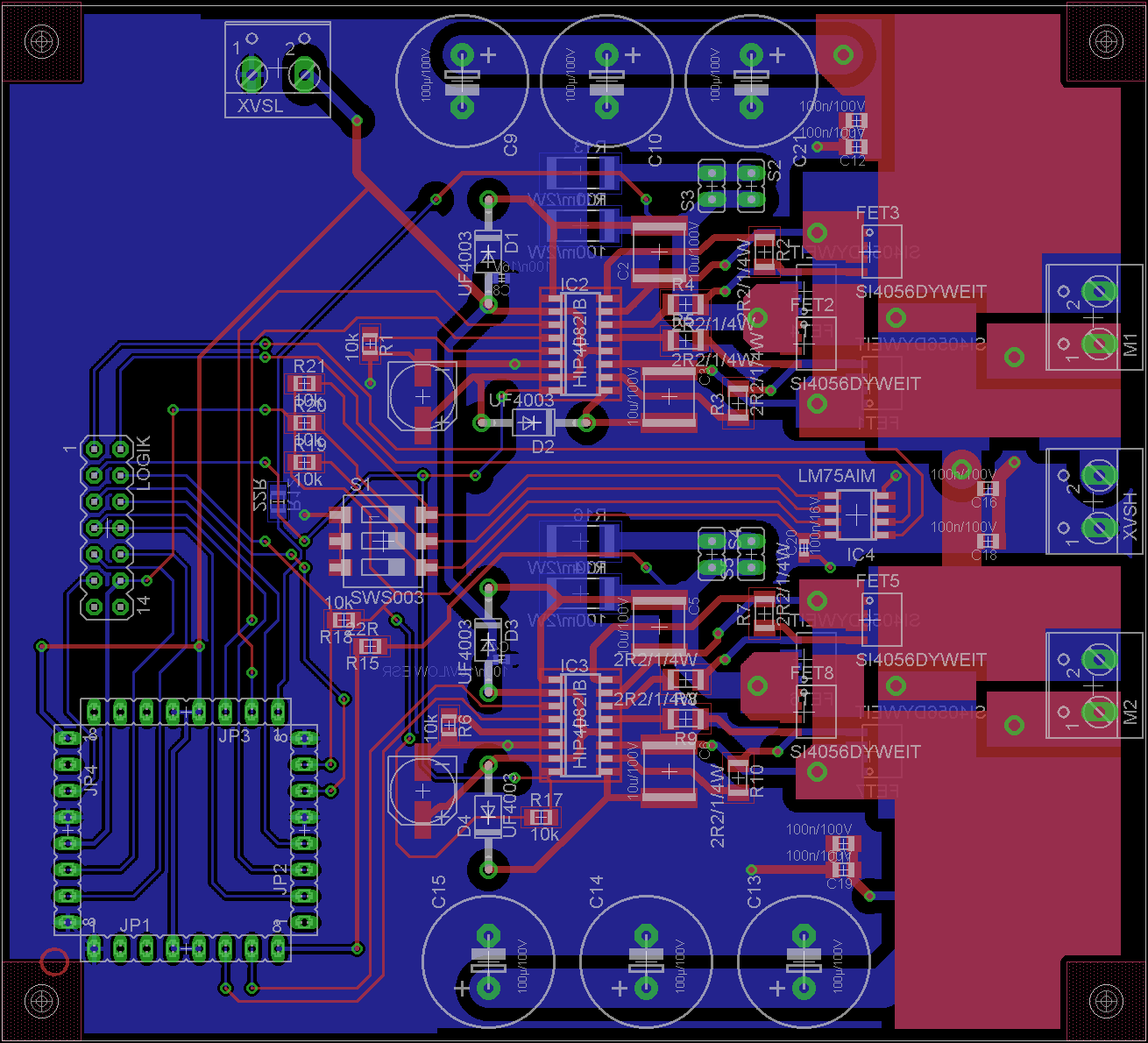
motorkarte-board.png
120 KB
Oliver P. schrieb: > Ich meinte die Anbindung an die großen Elkos. Oben ist die Leiterbahn > breit, unten nicht. Ahja. Die hab ich ganz übersehen. Ich denke soweit hab ich fast alles Besprochene behandelt und häng das geänderte Board noch mal an. Da ich mir ein komplettes Neuzeichen sparen wollte hab ich versucht den Temperatursensor einfach noch ein wenig zu den MOSFETS zu schieben. Das einzige bei dem ich mir noch ein wenig unsicher bin, sind die Abstände bezüglich der Spannung (70V). Würd mich freuen, da noch einen Tipp zu bekommen. Ansonsten vielen vielen Dank für die schnelle Hilfe und die vielen Tipps!! MFG Michi
> Die Möglichkeit einer galvanischen Durchkontaktierung haben wir > leider nicht. Somit bleibt uns nur die Durchkontaktierung > per Draht übrig. Dann würde ich auf Durchkontaktierungen verzichten und direkt fädeln. Dadurch vermeidest Du das Zerstückeln der Gnd-Planes, die sehr wichtig sind (z.B durch die 12V-Leitung zu den HIPs). Versuche, das Layout noch kompakter zu machen und Verbindungen möglichst gerade, gerne auch in beliebigem Winkel! Das Aussehen ist egal, aber jeder 90°-Knick ist eine Spule mit einer viertel Windung mit entsprechender Induktivität, und auf diese reagiert der HIP ziemlich zickig! Z.B. die Sense-Leitungen sind unnötig ausschweifend. Außerdem die 2 Sense-Rs mit Jumper parallelisieren ist kontraproduktiv. 1 R spart Platz, zur Not einen zweiten huckepack drauf.
Ich hab mich mal an dem Board versucht und die obere Stufe etwas kompaktiert. So in etwa sieht das aus mit den kurzen Leitungen. Wenn man eine doppelseitige Platine hat, kann man auch beide Seiten für Bauteile nutzen. Was die Abstände an geht, ist der Knackpunkt eh das Footprint der Mosfet. Die sind halt wie sie sind.
Irgendwie fehlt da an den 70V eine große Kapazität, die die Energie im Freilauf auffängt.
Angehängte Dateien:
-

motorkarte-schematisch.png
74 KB -

motorkarte-board-nakt.png
70 KB -

motorkarte-board.png
64 KB -

motorkarte-board-bottom.png
33 KB -

motorkarte-board-top.png
45 KB
Abend, tut mir leid dass ich erst jetzt schreibe, aber hab ziemlich viel um die Ohren und erst jetz die Zeit gefunden. Ich hab das ganze Board neu gezeichnet und versucht alle eure Vorschläge und Anregungen zu beherzigen :-). eProfi schrieb: > Dann würde ich auf Durchkontaktierungen verzichten und direkt fädeln. > Dadurch vermeidest Du das Zerstückeln der Gnd-Planes, die sehr wichtig > sind (z.B durch die 12V-Leitung zu den HIPs). Mit fädeln sind Drahtbrücken gemeint? eProfi schrieb: > Versuche, das Layout noch kompakter zu machen und Verbindungen möglichst > gerade, gerne auch in beliebigem Winkel! Das Aussehen ist egal, aber > jeder 90°-Knick ist eine Spule mit einer viertel Windung mit > entsprechender Induktivität, und auf diese reagiert der HIP ziemlich > zickig! Die Massefläche ist durch das zweiseitige bestücken leider noch mehr unter Mitleidenschaft gezohgen worde. Jedoch sind die wichtigsten Leitungen sehr dick ausgeführt. eProfi schrieb: > Z.B. die Sense-Leitungen sind unnötig ausschweifend. > Außerdem die 2 Sense-Rs mit Jumper parallelisieren ist kontraproduktiv. > 1 R spart Platz, zur Not einen zweiten huckepack drauf. Naja mit dem Jumper würd ich gern den Strom einstellen können. Hab jetzt wegen der Strombelastbarkeit von 2A noch einen zweiten parallel geschalten. Oliver P. schrieb: > Ich hab mich mal an dem Board versucht und die obere Stufe etwas > kompaktiert. So in etwa sieht das aus mit den kurzen Leitungen. > Wenn man eine doppelseitige Platine hat, kann man auch beide Seiten für > Bauteile nutzen. > Was die Abstände an geht, ist der Knackpunkt eh das Footprint der > Mosfet. Die sind halt wie sie sind. Hab recht lange mit der Anordung der MOSFETS herumgespielt. Jetzt gefällts mir ziemlich gut. Sieht deinem auch recht ähnlich ;-). Simon K. schrieb: > Irgendwie fehlt da an den 70V eine große Kapazität, die die Energie im > Freilauf auffängt. Was ich bis jetzt verschwiegen hab ist, dass die 70V von einem selbstgebautem Netzgerät kommen (Trafonetzgerät mit Glättungskondis, 11.000uF). Hab zur Sicherheit aber auch noch mal 3 100uF Kondis aufs Board gepackt. Können ja nicht schaden :-). Die Leitungen vom HIP weg sind jetzt zwar nur mehr 0,6mm dick, jedoch bringts ja nix wenn die dicker sind als die Pads vom HIP oder? Wohlmöglich sollt ich vom Bootstrap-Kondi noch entwas dickere Leitungen zu den Gates von den Hips einzeichnen. MFG. Michi
Ich sehe, dass Du Dir sehr viel Mühe gibst, diese Version ist um Längen besser als die erste. Wir haben eine ähnlich Endstufe entwickelt, allerdings mit 4-lagiger Platine. Trotzdem wir uns ebenfalls sehr viel Mühe gaben, wirkt sich die in der Mechanik der Bauteile begründete Layout-Differenz der beiden Stufen deutlich messbar aus. Da merkt man jeder Millimeter. Folgende Tipps möchte ich Dir an die Hand geben: 1. Nutze die Länge der Bauteile zum Kürzen der Leitungen, z.B. D4, R2, R3, R7, R10 quer legen (bei D2 hast Du es ja gemacht). 2. Ein ganz wichtiger Punkt: setze Prioriäten bei der Vergabe der wertvollen Platinenfläche. IC4 (LM75) und dessen Dipschalter für die Adresse sind sowas von unwichtig! Wenn Du den Controller mittig zwischen die beiden Stufen setzt, werden beide Sense-Leitungen gleich lang, und diese beiden Leitungen sind extrem wichtig, weil sie wegen der geringen Spannung anfällig für Störungen sind. Der Gnd-Punkt vom Controller muss möglichst nahe am Gnd-Potential der Sense-Rs sein, sonst zwitschert der Motor. Dafür wäre z.B. sehr wichtig, dass die schöne mittlere Gnd-Schiene nicht durch die Leitung zu den beiden Disable (HIP-Pin 8) und die Sense-Leitung unterbrochen wird (siehe "8.1 Sense Resistors" Von diesem Kapitel ist jeder Satz wichtig, die schreiben das nicht ohne Grund hin). Die Disable-Leitung würde ich fädeln (suche nach Fädeltechnik), d.h. ein kleines Pad, an das Du einen Kupferlackdraht anlötest (ohne DuKo). Was mich wundert: die Disable-Pins gehen nicht an den Controller. Somit ist kein "passive fast decay" möglich. Bei mir spielt das eine ziemlich zentrale Rolle. Ich kenne den Trinamic nicht genau, kann sein, dass der nur mit "active fast decay" auskommt, wenn er es kontrolliert beenden kann. 3. Die Jumper für die Sense-Rs!?! Das habe ich jetzt gar nicht verstanden. Meine Idee war, den Platinen-Platz einzusparen für wichtigeres, nämlich das Ding möglichst kompakt zu bekommen. Jetzt erst sehe ich, dass du für den Controller eine Adpaterplatine einsetzt. Da muss ich tief durchatmen, gerade das kleine Chip würde einen wesentlich kleineren Aufbau ermöglichen, allerdings reichen vermutlich die 2 Lagen nicht aus. Nochwas zur Auflösung des Schaltplans (3069px × 2089px): bitte so wählen, dass man nicht ewig hin- und herscrollen muss.
Angehängte Dateien:
-

motorkarte-board.png
94 KB -

TMC-board.png
11 KB -

motorkarte-schaltung.png
38 KB -

TMC-Schaltung.png
8,8 KB


Abend, hab das alles nochmals versucht mir zu Herzen zu nehmen und die Platine nochmals teilweise überarbeitet. So wurde sich auch hergestellt. Vielen Danke auf jeden Fall für die vielen Anregungen und Hilfestellungen! eProfi schrieb: > 1. Nutze die Länge der Bauteile zum Kürzen der Leitungen, z.B. D4, R2, > R3, R7, R10 quer legen (bei D2 hast Du es ja gemacht). Hab ich gemacht. eProfi schrieb: > 2. Ein ganz wichtiger Punkt: setze Prioriäten bei der Vergabe der > wertvollen Platinenfläche. IC4 (LM75) und dessen Dipschalter für die > Adresse sind sowas von unwichtig! Wenn Du den Controller mittig zwischen > die beiden Stufen setzt, werden beide Sense-Leitungen gleich lang, und > diese beiden Leitungen sind extrem wichtig, weil sie wegen der geringen > Spannung anfällig für Störungen sind. > Der Gnd-Punkt vom Controller muss möglichst nahe am Gnd-Potential der > Sense-Rs sein, sonst zwitschert der Motor. Dafür wäre z.B. sehr wichtig, > dass die schöne mittlere Gnd-Schiene nicht durch die Leitung zu den > beiden Disable (HIP-Pin 8) und die Sense-Leitung unterbrochen wird > (siehe "8.1 Sense Resistors" Von diesem Kapitel ist jeder Satz wichtig, > die schreiben das nicht ohne Grund hin). Hab ich gemacht. Der Dip Schalter ist sowieso einigermaßen unnötig, wesshalb ich ihn ganz einfach durch Lötbrücken ersetzt hab. eProfi schrieb: > Die Disable-Leitung würde ich fädeln (suche nach Fädeltechnik), d.h. ein > kleines Pad, an das Du einen Kupferlackdraht anlötest (ohne DuKo). > Was mich wundert: die Disable-Pins gehen nicht an den Controller. Somit > ist kein "passive fast decay" möglich. Bei mir spielt das eine ziemlich > zentrale Rolle. Ich kenne den Trinamic nicht genau, kann sein, dass der > nur mit "active fast decay" auskommt, wenn er es kontrolliert beenden > kann. Das Fädeln ist das einzige das ich nicht umgesetzt hab. Das Abschalten der Hips geht ganz allein über den Mikrocontroller von statten, der TMC kann von sich aus seine Ausgänge lahm legen. Villeicht kommt das aufs selbe? eProfi schrieb: > 3. Die Jumper für die Sense-Rs!?! Das habe ich jetzt gar nicht > verstanden. > Meine Idee war, den Platinen-Platz einzusparen für wichtigeres, nämlich > das Ding möglichst kompakt zu bekommen. Jetzt erst sehe ich, dass du für > den Controller eine Adpaterplatine einsetzt. Da muss ich tief > durchatmen, gerade das kleine Chip würde einen wesentlich kleineren > Aufbau ermöglichen, allerdings reichen vermutlich die 2 Lagen nicht aus. Naja ich schalte mit den Jumpern einen 2ten Sense-Widerstand parallel, wodurch sich der gesamte Sense-Rs halbiert und mir einen doppelt so hohen Strom erlaubt. Da ich vorhab, die Platine universell einzusetzten sprich für mehrere Motoren find ich das sehr praktisch. Bedingt durch unsere begrenzten Mittel ist das wohl leider das Beste und Einfachste mit dem TMC. mfg. Michi
Jumper + Leiterbahnführung des Shunts ist Mist (entschuldige den Ausdruck). Grund: der Shunt liegt in der kritischen Kommutierungsmasche und zussammen mit dem Jumper + rießige Leiterbahnführung hast du dir ne schöne parasitäre Induktivität gebaut die dein Schaltverhalten stark beschädigt. Auch die Masche der MOSFETs + Shunt finde ich schon unnötig groß. Das zu Optimieren erfordert aber Kreativität und vermutlich ein Redesign des kompletten Leistungsteils. Wenn du eh mit einer zweiten Adapterplatine arbeitest wäre mein erster Ansatz eine Hauptplatine mit ausschließlich Leistungsteil, und dann zum draufstecken die Steuerplatine mit Gatetreibern etc. Damit hast dann nämlich ig 4 Lagen auf 2 2lagigen Platinen.
Zur allgemeinen Info: Es gibt einen weiteren Thread von Michael zu dieser Platine: Beitrag "Schrittmotor ruckelt/ HIP4082 raucht ab" Dort habe ich vielleicht zu scharfe Worte gewählt (weil ich nicht wissen konnte, dass es inzwischen ein Redesign gab), für die ich mich entschuldige. Also, das Design ist wiederum um zwei Klassen besser (meinen Respekt hast Du auf jeden Fall), aber offensichtlich noch nicht gut genug. Ich weiß auch nicht, wie viel Zeit und Energie Du noch hast. > Doch dürfte der Strom durch die Brücke doch gar nix mit den Hips > zu tun haben oder? Deshalb hole ich ein wenige weiter aus: Als Einsteiger meint man, das Potential einer Leitung wäre an allen Stellen gleich. Ist es aber nicht, weil alle Leitungen untereinander magnetisch gekoppelt sind, d.h. nahe beieinanderliegende Leitungen wirken wie Transformatoren. Die Kopplung ist umso stärker, je näher die Leitungen beieinanderliegen und je dünner und länger sie sind. Deshalb ist es so wichtig, die Leitungen kurz zu halten, vor allem, wenn wie hier hohe dI/dt im Spiel sind. ccc, ich (und das Datenblatt / AppNote) sagen es zum wiederholten Male: Die Sense-Rs haben einen entscheidenden Anteil am Funktionieren der Schaltung. Es ist extrem wichtig, dass deren Zuleitungen SO KURZ WIE MÖGLICH sind und möglichst kleine Loops entstehen. Du hast Dich irgendwie darauf fixiert, die Jumper einzubauen. Löse Dich bitte von dieser Einstellung. Jumper haben hier NICHTS zu suchen. Wenn nötig, tauschst Du den Sense-R aus oder lötest einen zweiten Huckepack drauf. Genauso wie der Temp-Sensor. Den brauchst Du nicht, weg damit. Die dadurch enstehenden Nachteile sind einfach zu groß. Lasse auf der Platine so viel wie möglich Kupfer stehen, vor allem auf der roten Seite (z.B. schadet es nicht, die blauen Plus-Leitungen zu den dicken Cs auf der roten Seite parallel zu legen). Kupfer leitet Strom und Wärme! Die Idee von ccc, mehr auf die Adapterplatte zu packen, ist zu überlegen! Wobei ich glaube, man kann es auch so hinbringen. Als erstes ist wichtig, das Gnd des Trinamic mit dem Gnd der Sense-Rs möglichst impedanzarm zu verbinden. Dringende empfohlene Literatur (die genannten Threads bitte ganz durchlesen): The Do's and Don'ts of Using MOS-Gated Transistors: www.irf.com/technical-info/appnotes/an-936.pdf www.mikrocontroller.net/topic/89603#787403 www.mikrocontroller.net/topic/120053#1085287 www.mikrocontroller.net/topic/123482#1126099 www.mikrocontroller.net/topic/162459#1551021 www.mikrocontroller.net/topic/207864 http://www.lothar-miller.de/s9y/categories/14-Entkopplung http://www.lothar-miller.de/s9y/categories/40-Layout-Schaltregler Über das Routen nur in 45°-Vielfachen gibt es ja auch verschiedene Meinungen. Meine ist ganz klar: Es muss nicht schön aussehen, sondern gut funktionieren. Erst mit gutem und richtig verwendetem Mess-Werkzeug sieht man, was wirklich passiert. Z.B. dass bei schlechter Masseführung die Gnd-Potentiale sich gleich mal um zig V unterscheiden können. Unzerstückelte Gnd-Flächen bewirken einen Kurzschluss der o.g. transformatorischen Wirkung und damit eine Beruhigung des Gnd. Halte uns auf dem Laufenden. Viel Erfolg!
Noch ein paar Gedanken:
Es wird schwierig, zu sagen, an dem oder dem hat es gelegen, dass Rauch
entwich. Man kann jedoch viel durch richtiges Messen lernen. Und dann
sukzessive den Aufbau verbessern.
Durchkontaktierungen sind mehrfach auszuführen, wenn viel Strom
drüberfließt.
Die Boost-Cs (10µ 100V) können viel kleiner sein, 1µ 25V reicht leicht.
Haben die HIPs keine keramischen Cs an der Versorgung?
Vielleicht ist es ratsam, die HIP4081 zu verwenden.
> Komisch ist auch, dass jetzt schon drei mal der obere HIP geraucht hat.
Das kenne ich zu gut. Trotz identischem Schaltplan für die beiden Stufen
verhalten sie sich unterschiedlich - das liegt am nicht 100% identischen
Layout!
Warum verwendest Du keine SMD-UF4003?
Nochmal zu ccc's Idee: Wenn mit zwei Platinen übereinander, dann würde
ich die Adapterplatine so designen, dass die Pins (z.B. die Leitungen zu
den HIPs und zu den Sense-Rs an strategisch günstigen Orten auf die
Hauptplatine gehen.
Aber ich tediere immer noch dazu, gar keine Adapterplatine zu verwenden,
sondern den TMC direkt zwischen die HIPs zu setzen (möglichst nahe an
die Sense-Rs). Fädeldraht ersetzt weitere Lagen. Es soll ja keine
Massenfertigung werden, oder? Das mag aber bei zwei Lagen auch eine
Schnaps-Idee sein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.