Hallo zusammen, ich möchte mit dem ADXL330 3-Achsen-Beschleunigungssensor die Auslenkung einer beweglichen Stange bestimmen. Dieser Sensor liefert Spannungen über 3 Ausgänge (für die 3 Achsen), die proportional zur Auslenkung sind. Ich nutze dafür nur 2 der Ausgänge, bekomme also 2 Spannungen, eine von der x-Achse des Sensors und eine von der y-Achse. Den Versuchsaufbau kann man sich wie eine alte Wanduhr vorstellen: Es gibt eine Art "Pendel", an welchem der Sensor angebracht ist, und ich möchte den Auslenkungswinkel berechnen, der zwischen "Pendel" und der Vertikalen liegt. Das Programm zur Spannungsauslese ist fertig und ich bekomme bei Auslenkung einen schönen Spannungsverlauf ausgegeben. Frage: Wie komme ich anhand dieser Spannungen (eine für die x- und eine für die y-Achse) nun auf den Winkel? Das sollte eigentlich relativ simple Trigonometrie sein, allerdings komme ich grade nicht weiter. Vielen Dank vorab!
Vala schrieb: > Das sollte eigentlich relativ simple Trigonometrie sein, allerdings > komme ich grade nicht weiter. rechtwinkeliges Dreieck und die Definitonen des Sinus bzw. Cosinus am Einheitskreis (und dem darin eingezeichneten rechtwinkeligem Dreieck, dessen Seiten den Sinus bzw. Cosinus repräsentieren). Mehr brauchst du nicht. Oh. Und natürlich den Phythagoras, um deine Messwerte erst mal auf einen Gesamtvektor der Länge 1 zu normieren. Und ich denke mal, je nach Betrachtungsweise des Problems, sind auch noch ähnliche Dreiecke im Spiel. Aber das ist jetzt schon mathematische Spitzfindigkeit :-) Auf Papier die Situation aufzeichnen, und die Werte, die du gemessen hast einzeichnen. Dann wird das ganze so richtig trivial.
Vala schrieb: > Es gibt eine Art "Pendel", an welchem der Sensor angebracht ist, Wo genau ist er angebracht? Das Teil misst Beschleunigungen. Es misst auch die Beschleunigungen des Pendels. Wenn du aus den Beschleunigungen einfach (Wie Karl Heinz oben angedeutet hat) deinen Winkel erfassen willst sollte des Sensor tunlichst GENAU auf der Drehachse des Pendels sitzen.
Angehängte Dateien:
-

auslenkung.png
6,7 KB
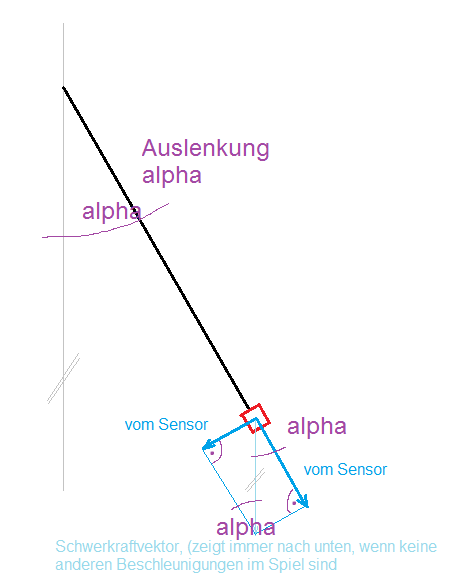
So sieht die zughehörige Zeichnung aus. Damit sollte es eigentlich nicht mehr schwer sein, die entsprechenden Gleichungen aufzustellen. Mir völlig unverständlich, wie man geometrische Probleme angehen kann, ohne sich zuvor eine Skizze gemacht zu haben.
Nur das er so (Sensor aussen am Pendel) beim Pendeln kaum eine tangentiale und dafür eine höhere radiale Beschleunigung messen wird. Da das Pendel PENDELT gleicht sich der tangentiale Anteil der Gewichtskraft mit der tangentialen Momentanbeschleunigung halbwegs aus. Ausser er setzt den Sensor in oder möglichst nahe an den Drehpunkt.
Udo Schmitt schrieb: > Nur das er so (Sensor aussen am Pendel) beim Pendeln eingangsposting lesen. Es handelt sich um eine drehbar gelagerte Stange, die ausgelenkt wird. > dafür eine höhere radiale Beschleunigung messen wird. im Umkehrpunkt (der sich in den Daten erkennen lässt), verschwindet auch diese Komponente.
Karl Heinz schrieb: > eingangsposting lesen. > Es handelt sich um eine drehbar gelagerte Stange, die ausgelenkt wird. Stimmt, aber der TO hat auch das geschrieben: Vala schrieb: > gibt eine Art "Pendel", an welchem der Sensor angebracht ist Karl Heinz schrieb: > im Umkehrpunkt (der sich in den Daten erkennen lässt), verschwindet auch > diese Komponente. Richtig, aber damit kann er nur die maximale Auslenkung und (falls die Stange wirklich frei pendelt) nicht die Auslenkung in Abhängigkeit der Zeit bestimmen. Na ja falls der TO sich nochmal meldet kann er ja mal genauer sagen um was es wirklich geht.
Udo Schmitt schrieb: > Karl Heinz schrieb: >> eingangsposting lesen. >> Es handelt sich um eine drehbar gelagerte Stange, die ausgelenkt wird. > > Stimmt, aber der TO hat auch das geschrieben: > > Vala schrieb: >> gibt eine Art "Pendel", an welchem der Sensor angebracht ist ok. geb ich zu, das ist nicht ganz eindeutig. Ich habe es so aufgefasst, dass die Stange ausgelenkt und dann fixiert (im Drehpunkt geklemmt) wird. Wenn das natürlich dynamisch schaukelt, dann sind wir wieder genau dort, wo wir schon 5-tausend mal waren: Ein Beschleunigungssensor ist bei nicht gleichförmig geradlinigen Bewegungen zu nichts zu gebrauchen. (ok, das "nichts" ist etwas übertrieben)
Danke für die vielen Rückmeldungen! Die Skizze von Karl Heinz trifft die Sache ziemlich genau. Der Begriff Pendel war vielleicht etwas ungeschickt gewählt, ich wollte damit nur veranschaulichen, wie der Versuch aufgebaut ist. Es liegt keine Oszillation in dem Sinne vor, sondern es soll im Prinzip über die ausgegebenen Spannungen in einer bestimmten (in diesem Moment statischen) Lage der Winkel bestimmt werden - ebenfalls wie Karl Heinz das interpretiert hat. Für die Achsen einzeln klappt das auch gut über arcsinus bzw arccosinus. Da ich aber für eine höhere Genauigkeit gerne beide Achsen nutzen würde und nicht nur eine, muss ich die beiden ja noch verrechnen...
Vala schrieb: > Für die Achsen einzeln klappt das auch gut über arcsinus bzw arccosinus. > Da ich aber für eine höhere Genauigkeit gerne beide Achsen nutzen würde > und nicht nur eine, muss ich die beiden ja noch verrechnen... Ja, dann mach das. Wie in der Skizze ersichtlich, errechnet man sich die Länge des Schwerkraftvektors (das ist der senkrechte) mittels Phythagoras und dann hat man 2 rechtwinkelige Dreiecke von denen man jeweils 3 Seiten (und einen Winkel). Mittels Trigonometrie errechnet man dann den gesuchten Winkel Alpha. Theoretisch sollten die beiden Ergebnisse identisch sein und nicht davon abhängen, welches der beiden rechwinkeligen Dreiecke man benutzt. Aber ob das in der Praxis auch so ist? :-) Den phythagoras könnte man einsparen, wenn man über den Tangens geht, aber ich hab eine persönliche Abneigung gegen den Tangens, da der in bestimmten Lagen gegen plus/minus unendlich geht. Das sorgt dann wieder für Sonderfälle und dgl.. Dann lieber einmal die Hypothenuse ausrechnen und gut ists.
Also, was ich bisher mache ist: (Alles jeweils für die x-Werte und die y-Werte getrennt) Ich vermesse den Sensor einmal komplett über 360° und entnehme diesen Spannungswerten U jeweils Maximum und Minimum. Daraus bekomme ich den Mittelwert U_M (von Maximum und Minimum) und die Abweichung des Mittelwerts zu Maximum und Minimum U_R. Diesen Mittelwert U_M ziehe ich dann von allen Werten ab. Den so entstehenden Wert teile ich durch die Abweichung U_R und ziehe den Arcsinus. Als Gleichung also: Winkel = arcsin[ (U - U_M)/U_R] *180/pi Auf diese Weise zeigt mir die eine Achse ziemlich genau den Winkelbereich an, den ich durchmesse (anders gesagt: ich lenke die Stange in Grad-Schritten um insgesamt x Grad aus, dann ist die Differenz zwischen dem so berechneten Start- und Endwert ziemlich genau x - das scheint also zu klappen). Die Werte der anderen Achse sind Parabelförmig. Das ist natürlich abhängig von der Startausrichtung des Sensors. D.h. ich erhalte auf diese Weise für die 2 Achsen jeweils eine Winkelverteilung. Was ich jetzt noch machen möchte ist eben, diese zu verrechnen und letztlich einen möglichst exakten Winkel haben.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.