1 | int main(void)
|
2 | {
|
3 | SystemInit();
|
4 |
|
5 | RCC_Configuration();
|
6 | RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
|
7 | RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
|
8 |
|
9 | GPIO_InitTypeDef GPIO_InitStructure;
|
10 | GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
|
11 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
|
12 | GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
|
13 | GPIO_Init(GPIOA, &GPIO_InitStructure);
|
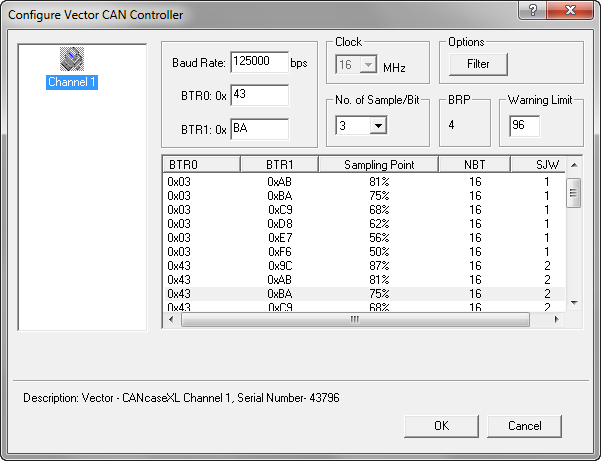
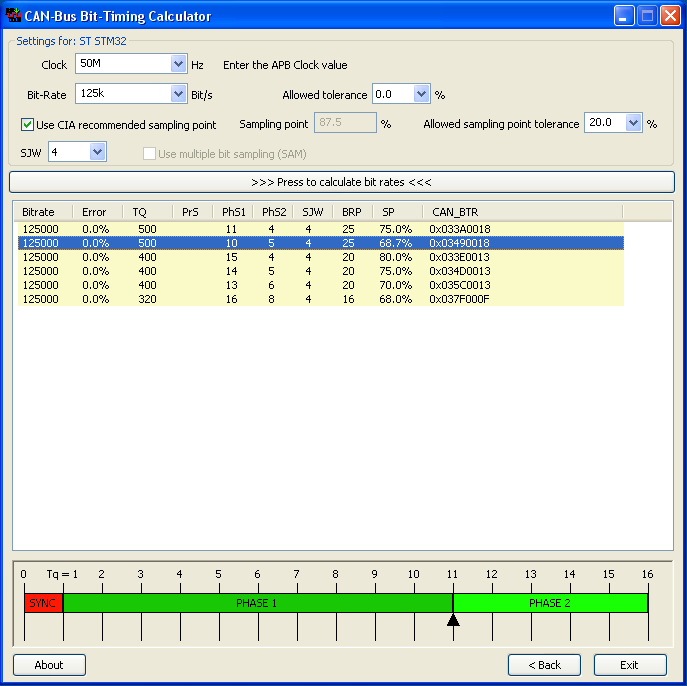
14 |
|
15 | GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
|
16 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
|
17 | GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
|
18 | GPIO_Init(GPIOA, &GPIO_InitStructure);
|
19 |
|
20 | GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
|
21 | GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
|
22 | GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
|
23 | GPIO_Init(GPIOB, &GPIO_InitStructure);
|
24 |
|
25 | CAN_InitTypeDef CAN_InitStructure;
|
26 | CAN_InitStructure.CAN_Prescaler = 26;
|
27 | CAN_InitStructure.CAN_BS1 = CAN_BS1_10tq;
|
28 | CAN_InitStructure.CAN_BS2 = CAN_BS2_4tq;
|
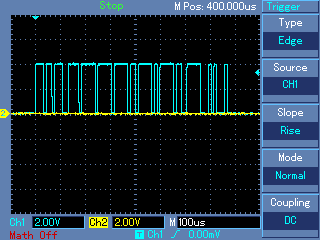
29 |
|
30 | CAN_InitStructure.CAN_TTCM = DISABLE;
|
31 | CAN_InitStructure.CAN_ABOM = DISABLE;
|
32 | CAN_InitStructure.CAN_AWUM = DISABLE;
|
33 | CAN_InitStructure.CAN_NART = ENABLE;
|
34 | CAN_InitStructure.CAN_RFLM = DISABLE;
|
35 | CAN_InitStructure.CAN_TXFP = ENABLE;
|
36 | CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
|
37 | CAN_InitStructure.CAN_SJW = CAN_SJW_4tq;
|
38 | uint8_t temp = CAN_Init(CAN1, &CAN_InitStructure);
|
39 |
|
40 | CanTxMsg canMessage;
|
41 |
|
42 | canMessage.StdId = 0x123;
|
43 | canMessage.RTR = CAN_RTR_DATA;
|
44 | canMessage.IDE = CAN_ID_STD;
|
45 |
|
46 | canMessage.DLC = 4;
|
47 |
|
48 | canMessage.Data[0] = 0;
|
49 | canMessage.Data[1] = 1;
|
50 | canMessage.Data[2] = 2;
|
51 | canMessage.Data[3] = 3;
|
52 |
|
53 | while(1)
|
54 | {
|
55 | GPIOB->ODR ^= GPIO_Pin_10;
|
56 | CAN_Transmit(CAN1, &canMessage);
|
57 | Delay(1700000);
|
58 | }
|
59 | }
|