1 | #include <avr/io.h>
|
2 | #include <util/delay.h>
|
3 |
|
4 | #define WP (1<<PC5) // Write Protect disable @PC5
|
5 | #define HOLD (1<<PC4) // Stop serial communication disable @PC4
|
6 | #define CE (1<<PB2) // Chip Enable @PB2
|
7 | #define MOSI (1<<PB3) // Master Out Slave In @PB3
|
8 | #define MISO (1<<PB4) // Master In Slave Out @PB4
|
9 | #define SCK (1<<PB5) // Clock @PB5
|
10 |
|
11 | uint8_t data, status_register=0;
|
12 |
|
13 | void SPI_MasterInit(void)
|
14 | {
|
15 | DDRB = MOSI|SCK|CE; // Set MOSI, SCK, CE output
|
16 | SPCR = (1<<SPE)|(1<<MSTR)|(1<<SPR1); // Enable SPI, Master, set clock rate fck/64
|
17 | }
|
18 | void SPI_MasterTransmit(uint8_t data)
|
19 | {
|
20 | SPDR = data; // Start transmission
|
21 | while(!(SPSR & (1<<SPIF))); // Wait for transmission complete
|
22 | }
|
23 |
|
24 | uint8_t SPI_SlaveReceive(void)
|
25 | {
|
26 | while(!(SPSR & (1<<SPIF))); // Wait for reception complete
|
27 | return SPDR; // Return SPI-Dataregister
|
28 | }
|
29 |
|
30 | int main(void)
|
31 | {
|
32 | DDRC |= WP | HOLD; // Set WP, HOLD output
|
33 | PORTC |= WP|HOLD; // Set WP, HOLD high
|
34 |
|
35 | while(1)
|
36 | {
|
37 | SPI_MasterInit(); // Init SPI Master
|
38 | PORTB &= ~CE; // CE = low (start communication)
|
39 | SPI_MasterTransmit(0x05); // Send command 0x05 (Read the status register)
|
40 | SPI_MasterTransmit(0x00); // Send one dummy byte
|
41 | status_register = SPI_SlaveReceive(); // Store the value of the status register
|
42 | PORTB |= CE; // CE = high (end of communication)
|
43 | status_register=0; // set the variable to 0
|
44 | _delay_us(10);
|
45 |
|
46 | PORTB &= ~CE; // CE = low (start communication)
|
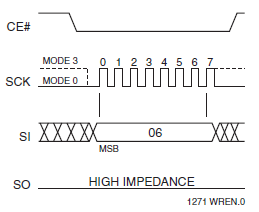
47 | SPI_MasterTransmit(0x06); // Send command 0x06 (Set write enable WREN)
|
48 | PORTB |= CE; // CE = high (end of communication)
|
49 | _delay_us(10);
|
50 |
|
51 | PORTB &= ~CE; // CE = low (start communication)
|
52 | SPI_MasterTransmit(0x02); // Send command 0x02 (program one data byte)
|
53 | SPI_MasterTransmit(0x00); // Send 1. Addressbyte (MSB first)
|
54 | SPI_MasterTransmit(0x00); // Send 2. Addressbyte
|
55 | SPI_MasterTransmit(0x00); // Send 3. Addressbyte
|
56 | SPI_MasterTransmit(0xAA); // Send Databyte
|
57 | PORTB |= CE; // CE = high (end of communication)
|
58 | _delay_us(10);
|
59 |
|
60 | PORTB &= ~CE; // CE = low (start communication)
|
61 | SPI_MasterTransmit(0x04); // WRDI (write disable) Send command 0x04
|
62 | PORTB |= CE; // CE = high (end of communication)
|
63 | _delay_us(10);
|
64 |
|
65 | PORTB &= ~CE; // CE = low (start communication)
|
66 | SPI_MasterTransmit(0x03); // Send command 0x03 Read
|
67 | SPI_MasterTransmit(0x00); // Send 1. Addressbyte (MSB first)
|
68 | SPI_MasterTransmit(0x00); // Send 2. Addressbyte
|
69 | SPI_MasterTransmit(0x00); // Send 3. Addressbyte
|
70 | SPI_MasterTransmit(0x00); // Send Dummybyte
|
71 | PORTB |= CE; // CE = high (end of communication)
|
72 | data = SPI_SlaveReceive();
|
73 | data = 0;
|
74 | }
|
75 | }
|