
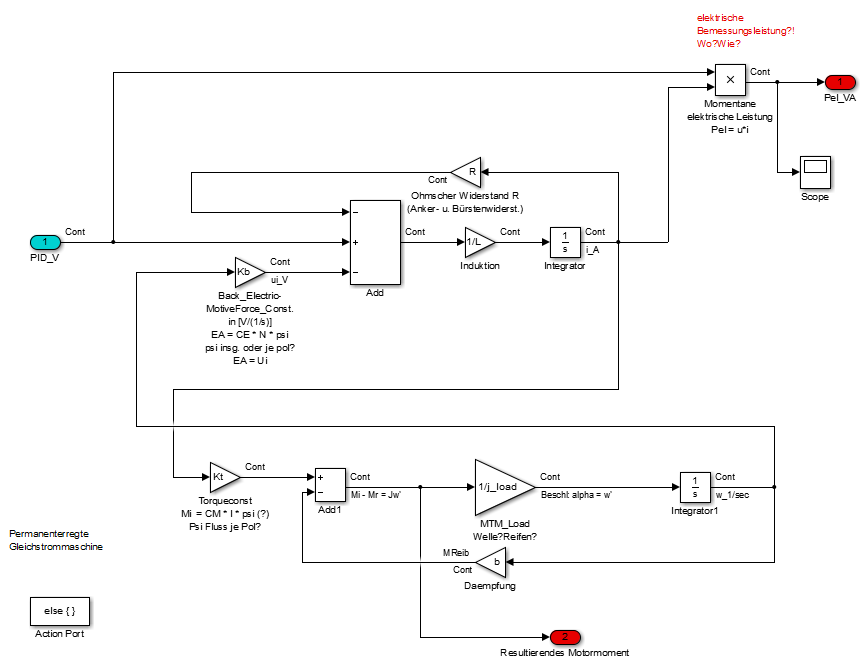
Hallo Ich bin dabei einen Permanenterregten Gleichstrommotor in Simulink zu simulieren. Meine erste Grundlegende Frage ist, ob eine Kaskadenregelung dafür notwendig ist. Bislang habe ich einen PID-Regler, der mir die Drehzahlabweichung in eine Spannung umwandelt. Reicht das für eine angemessene Regelung? Desweiteren komm ich gerade durcheinander mit den Leistungen. Unzwar möchte ich, wie üblich, in der gui die elektrische Bemessungs-Motorleistung angeben. Rauskommen soll mechanische Leistung, also die angegebene Bemessungsleistung abzüglich der Verluste. Wenn man sich meinen Signalflussplan der DC-Maschine anschaut, kommt die elektr. Bemessungsleistung nirgends vor. Frage ist also, wie integriere ich die, vom Benutzer angegebene, Bemessungsleistung in meinen Signalflussplan? Oder ist mein Plan fehlerhaft? Danke MfG
Angehängte Dateien:
-

gui.PNG
6,8 KB -

dc_engine.PNG
34 KB
cbow schrieb: > Meine erste Grundlegende Frage ist, ob eine Kaskadenregelung dafür > notwendig ist. Brauchen tut man die Kaskadenregelung nicht. Aber der Regler wird schneller.
> Meine erste Grundlegende Frage ist, ob eine Kaskadenregelung > dafür notwendig ist. Und meine erste Frage waere warum du einen Motor regeln willst. Niemand will eigentlich einen Motor regeln. Alle wollen immer einen Motor regeln der auch irgendwas antreibt. .-) > Reicht das für eine angemessene Regelung? Das kommt drauf an. :-D Ich denke das ein PID vollkommen ausreicht. Aber kannst du dehn denn dimensionieren? Glaubst du das dein Modell einer realen Strecke gut genug ist? Wenn das der Fall und deine Simulation gut laeuft dann hast du doch sicherlich keine Bedenken das es in der Praxis auch funktioniert. Im realen Leben ist aber ein Kaskadenregler klueger weil er die Probleme in kleine Haeppchen aufteilt die sich einzeln besser beherschen lassen. Ausserdem kann man dann auch geziehlt auf einzelne Parameter eingehen. So koenntest du z.B dann das Drehmoment begrenzen. > Stichwort Normierung? Wo sticht dich das Wort und warum? Wenn schon wuerde ich mir eher Gedanken machen um das Wort "linearisierung". Besonders dann wenn an deinem Motor eine Mechanik mit Spiel angebracht. Olaf
Angehängte Dateien:
-

RK.PNG
11 KB
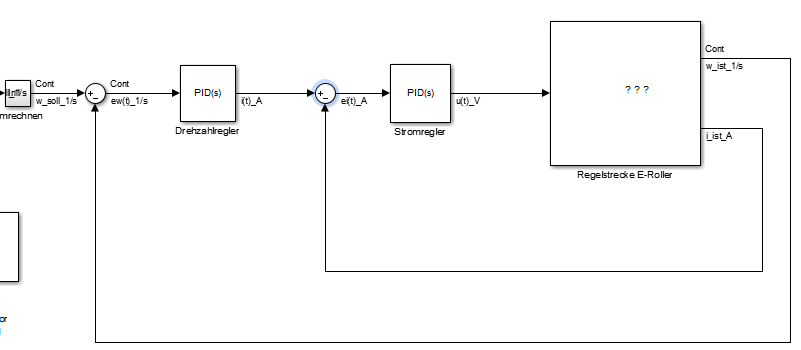
Danke schonmal! Ich versuche mich gerade an der Kaskadenregelung. Das heißt ich habe einen Drehzahlregler (äußerer Regelkreis) und einen Stromregler (innerer RK). Der Motor treibt ein Fahrzeug an. Sollwertgeber ist ein Fahrzyklus, also Sollgeschwindigkeit, die ich direkt in eine Sollkreisfrequenz umrechnen kann. Schaut euch bitte mal meinen Regelkreis an. Haut das hin mit den Einheiten? bzw. macht das Sinn? Ich finds noch sehr schwierig das ganze mit zwei Reglern gedanklich nachzuvollziehen. Danke! MfG
Hallo cbow, das ganze sieht so in Ordnung aus. Du kannst bei einem Kaskadenregler in jeder Regelschleife auch einfachere Reglerstrukturen verwenden. Für den inneren Stromregelkreis reicht ein PI-Regler völlig aus. Zum Einstellen klemmst du erst einmal i(t)_A ab und klemmst stattdessen einen Einheitsprung an. Dann plottest Du Dir i_ist und schaust, dass der Sprung gut ausgeregelt wird. Üblicherweise neigt man dazu, in Simulationen den Regler aggressiver einzustellen als es in Realität möglich ist. Dann den PID anklemmen, und alles erstmal auf 0 setzen. Dann P bis zur Stabilitätsgrenze aufrehen (Dauerschwingung). Von diesem Wert wieder 15-20% abziehen. Dann D aufdrehen bis es nur noch 2-3 Überschwinger gibt. Später noch I aufdrehen damit die bleibende Regelabweichung weggeht. Stefan
Warum nimmst du nicht für die Gleichstrommaschiene ein P-T1 Glied an? Dann kannst du leicht die Kaskadenstruktur aufbauen. Strom/Momentreger wird überlagert vom Drehzahlreger und dem ist widerrum die Positionsregelung überlagert. Muss dir natürlich überlegen wie man z. B einen Stromrichter nachbilden kann..
Frager schrieb: > Warum nimmst du nicht für die Gleichstrommaschiene ein P-T1 Glied > an? > Dann kannst du leicht die Kaskadenstruktur aufbauen. Strom/Momentreger > wird überlagert vom Drehzahlreger und dem ist widerrum die > Positionsregelung überlagert. Muss dir natürlich überlegen wie man z. B > einen Stromrichter nachbilden kann.. Natürlich könnte man auch die gesamte unterlagerte Regelung dann wieder approximieren.
Danke! Auch super die Beschreibung zur Einstellung der Regler! MfG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.