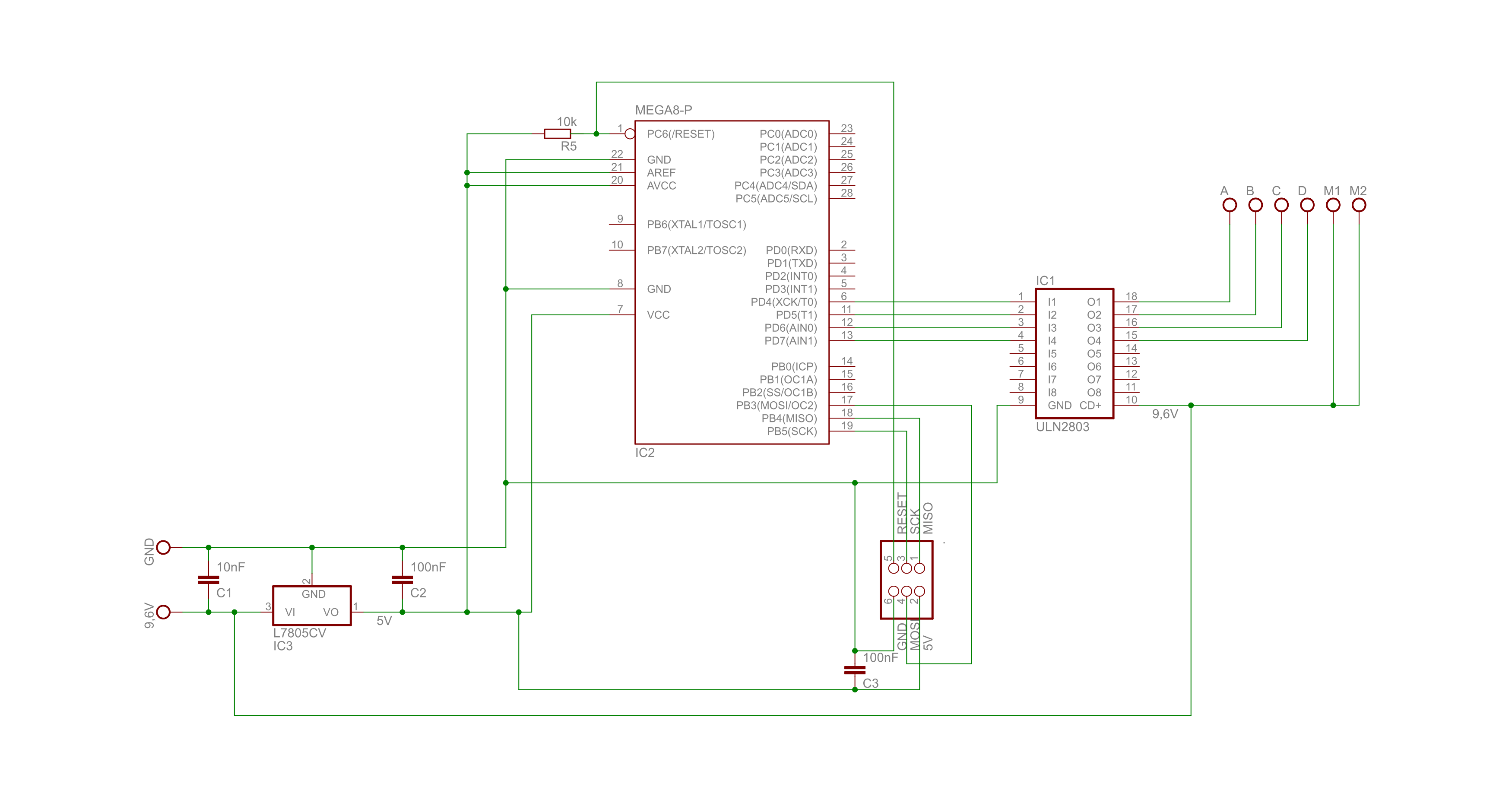
Hallo µC-Gemeinde, kurze Vorgeschichte, da dies mein erster Beitrag hier ist: Angefangen habe ich mit kleineren Arduinoprojekten und diesem (falls ihn jemand kennen sollte) MaVin-Roboter von Multiplex. Allerdings war letzter stark auf die Softwareseite ausgelegt und mit Hardware hatte man (außer Module aufstecken und am Stecker wackeln) nicht wirklich was zu tun. Deshalb dachte ich, ich fange mal mit etwas "eigenem" an um auch in Sachen Hardware ein wenig voranzukommen. TL;DR: Erstmal hab ich mir vorgenommen, einen Schrittmotor anzusteuern. Ausgesucht habe ich mir hierfür einen unipolaren Schrittmotor, den ich auch (erstmal) unipolar ansteuern will. Unipolar einfach wegen des geringeren Schaltungsaufwandes. Da ich, wie gesagt, allerdings in Sachen Hardware relativ neu bin und mein Wissen aus verschiedenen Quellen habe, wäre es für mich hilfreich, wenn sich jemand die Zeit nehmen würde um nochmal über meinen Schaltplan rüber zu schaun. Kurze Erläuterung/Fragen zum Plan: - Auf die 9,6V (und 0,48A) komme ich, da ich mir bereits einen Schrittmotor ausgeguckt habe (bin ich günstig rangekommen). Datenblatt hierzu "-803": http://www.datasheetarchive.com/dl/Scans-031/ScansU9X38022.pdf -M1, M2 im Plan sind die Mittelspulenabgriffe. Hier bin ich mir nicht sicher ob ich richtig angeschlossen habe. Ich arbeite hier ja mit negativer Logik, oder? -Auf Quarz habe ich bewusst verzichtet oder wäre für die Anwendung einer empfehlenswert? -Als µC dachte ich an einen Mega8. Ehrlichgesagt ohne speziellen Grund, ich dachte, dieser reicht für meine Anwendung völlig aus. -Den Atmega wollte ich wiederum mit dem im Tutorial empfohlenen ISP-Programmer von Atmel selbst beschreiben, da ich auch weiterhin gerne ohne Probleme mit Atmel Studio arbeiten würde. Mit der Software selbst komme ich hoffentlich dann wieder klar. -Und allgemein noch die Frage: Ich habe gelesen, dass man bei Schrittmotoren auch auf konstante Stromversorgung achten soll, was ist damit gemeint? Zieht der Motor nicht immer den Strom den er braucht? TL;DR#2: Läuft mein Unipolar-9,6V-Schrittmotor mit angehängter Schaltung und/oder gibt's Verbesserungsvorschläge? :-) Beste Grüße, Jochen Ach und danke schonmal - auch wenn ich bisher nie geposted hab, habt ihr mir doch schon echt oft Fragen beantwortet!
Angehängte Dateien:
So kannst du nur recht langsam drehen. Das hat 2 Gründe: 1. Sobald dein Motor vorwärts läuft, induziert er in den nicht angesteuerten Windungen eine Spannung. Die wird über die im 2803 eingebauten Dioden kurzgeschlossen und dadurch wird der Motor abgebremst. 2. Du hast nur 9,6V bereitgestellt. Der Motor hat aber nicht nur einen Widerstand sondern auch eine Induktivität. Beschleunigst du, bremst die Induktivität den Aufbau des Spulenstroms irgendwann stärker als der Innenwiderstand. Eine simple Methode, das zu umgehen, ist eine Spannung von z.B. 12-15V und 2 Widerstände in die Leitungen M1 und M2. Die müssen so gewählt werden, daß bei Ansteuerung nur einer Spule höchstens die erlaubten 0,34A im Stillstand fließen.
Jochen H. schrieb: > -Als µC dachte ich an einen Mega8. Ehrlichgesagt ohne speziellen Grund, > ich dachte, dieser reicht für meine Anwendung völlig aus. Und die Schaltung hat die üblichen Fehler ;-) Zwischen die Versorgungspins 7 - 8 und 20 - 22 gehört je ein Kondensator um die 100nF Aref wird nicht direkt sondern über einen Kondensator (auch um die 100nF) auf GND gelegt wenn Du keine extra Referenzspannung anlegen willst.
Hallo Jochen! > Erstmal hab ich mir vorgenommen, einen Schrittmotor anzusteuern. > Ausgesucht habe ich mir hierfür einen unipolaren Schrittmotor, den ich > auch (erstmal) unipolar ansteuern will. > Unipolar einfach wegen des geringeren Schaltungsaufwandes. Wenn du mit "Schaltungsaufwand" die Anzahl der Transistoren in einem Chip meinst, könntest du Recht haben. Das interessiert aber in der Regel niemanden. Da bei unipolarer Ansteuerung immer nur eine Hälfte des Motors verwendet wird, macht man das heute eigentlich kaum noch. Deswegen gibt es fast nur noch bipolare Treiber (von einigen japanischen Spezialitäten mal abgesehen). Es gibt inzwischen sehr gute und preiswerte Treiberchips für bipolare Motoren mit Mikroschritt-Ansteuerung und div. weiteren Funktionen (Kurzschlußschutz etc.). Der Aufwand diese modernen Treiber zu verwenden ist aus Anwender-Sicht nicht größer als der für den UN2803. Die Performance (mögliche Drehzahl, Drehmoment, Laufruhe usw.) ist aber deutlich höher... Mit freundlichen Grüßen Thorsten Ostermann
Erstmal danke euch für die schnellen Antworten Helge A. schrieb: > Eine simple Methode, das zu umgehen, ist eine Spannung von z.B. 12-15V > und 2 Widerstände in die Leitungen M1 und M2. Okay, deine beiden ersten Punkte ergeben für mich Sinn. Aber wie kommst du gerade auf 12-15V? Oder wählt man da einfach "irgendwas überhalb der Nennspannung" um den Bremseffekt quasi mit mehr Dampf auszugleichen? Oliver R. schrieb: > Und die Schaltung hat die üblichen Fehler ;-) Hab die Fehler inzwischen ausgebessert - danke :-) Und zu Thorsten kann ich sagen: Ich dachte mir schon schon fast, dass sich jemand an diesem Punkt stört. Ich hab's vielleicht auch blöd formuliert. Aber die Aufgabe habe ich mir mehr oder weniger als Übung zum Lernen von Grundlagen gestellt, es ist durchaus noch geplant später das Ganze z.B. mit L297/L298 und bipolar anzusteuern. Und das Ganze mal so gemacht zu haben schadet sicherlich auch nicht und ist, finde ich, auch nicht wirklich Mehraufwand. Aber danke dir für den Hinweis :-) Jochen
Hallo Jochen, > Helge A. schrieb: >> Eine simple Methode, das zu umgehen, ist eine Spannung von z.B. 12-15V >> und 2 Widerstände in die Leitungen M1 und M2. > > Okay, deine beiden ersten Punkte ergeben für mich Sinn. Aber wie kommst > du gerade auf 12-15V? Oder wählt man da einfach "irgendwas überhalb der > Nennspannung" um den Bremseffekt quasi mit mehr Dampf auszugleichen? Man muss halt ein gutes Mittelding finden zwischen der Motornennspannung und einer Spannung, bei der man deutlich mehr Verlustleistung in den Vorwiderständen hat als im Leistung im Motor umgesetzt wird. http://www.ostermann-net.de/electronic/schritt/sm_ansteuer.htm Mit freundlichen Grüßen Thorsten Ostermann
Unter 12V für eine 9V-Spule wird der Bremsen-Effekt stärker spürbar. Bei 18V wird, jedenfalls bei langsamem Lauf, schon die Hälfte der aufgenommenen Leistung in Wärme umgesetzt. Für eine solche Einfachschaltung, die ja eher zum Erforschen der Funktion und nit für eine große Serie gedacht ist, macht eine höhere Spannung kaum Sinn (außer es geht um hohe Drehzahlen). Für die praktische Anwendung in einem gut durchkonstruierten Gerät sind dann modernere Treiberbausteine das Mittel der Wahl, diese müssen dann möglichst eigenständig den Motorstrom im optimalen Bereich halten. Das geht z.B. mit L6208 und neueren Bausteinen relativ verlustarm, erfordert aber ein gutes Platinendesign: Diese moderneren Bausteine besitzen schnelle Mosfet-Schalter und arbeiten meist im Chopperbetrieb, dadurch entstehen viele schnelle Stromwechsel und bei schlechtem Design sendet sowas oder geht kaputt.
Ahh! - Wunderbar, der Link und Helges Beitrag haben mir sehr geholfen! Ich denke, da werd ich morgen oder übermorgen glatt mit dem Basteln anfangen :-) Danke euch beiden für die Mühe! Beste Grüße, Jochen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.