Guten Tag liebe Leute, ich muss gleich gestehen noch nie mit Mikrocontrollern gearbeitet zu haben. Auf der Suche bin ich nach einem Mikrocontroller der programmierbar ist mit C und 7 digitale Sensorwerte sowie 1 analogen Sensorwert verarbeiten kann. 2 Ausgänge sollen angesteuert werden. Er soll in einem 12V Netz arbeiten und als Steuergerät für ein ESP dienen. Dafür sollte er Echtzeitfähig sein. Könnte der schon passen? http://www.reichelt.com/TI-LAUNCHXL/3/index.html?&ACTION=3&LA=446&ARTICLE=129632&artnr=TI+LAUNCHXL&SEARCH=echtzeit Könnt ihr mir Tipps geben?
Wiso wilst du dier ein ESP selbst bauen? Ich würde allerdings für ein zuverläsiges System ein Brett selber bauen. Allein schon die Stromversorgung muss richtig dimensoiert/robustiert(Spikes) werden.
Not sure if trolling... Ich bin mir nicht sicher ob ich unter "ESP" das selbe verstehe wie du. Für mich ist es das Stabilitätsprogramm in Fahrzeugen, aber das kannst du wohl kaum meinen. Ansonsten sind fast alle Mikrocontroller echtzeitfähig wenn man sie entsprechend programmiert. Kommt nur darauf an ob du mit "reagiert garantiert in unter einer Sekunde" zufrieden bist, oder ob du unter echtzeitfähig etwas anderes verstehst.
Peter, stell es dir ungefähr so vor als hättest du zwei linke Hände und würdest dir nun ein kleines Gartenhaus mauern. Mit oder durch unsere Hilfe. Einfach? Nein. Machbar? Vielleicht. Vll versuchst du es erstmal mit einem Grill? Also schau dir das Tutorial an, lerne die Grundlagen uC und analog) und wähle einen uC aus, lasse eine LED blinken, ließ Daten ein, reagiere, programmiere Regler, PWM Erzeugung etc. pp. Klaus.
Das ist ein Projekt im Rahmen meines Studiums. Ich muss dabei einen Entwurf für eine Platine machen und muss dafür auch wissen welchen Controller ich einsetze. Auf dem Mikrocontroller soll dann der generierte C-Code aus einem Matlab-Simulink Modell laufen. Ob es irgendwann mal von Nachfolge-Semestern tatsächlich umgesetzt wird ist fraglich. Also es ist nicht Sicherheitkritisch. Es soll erstmal nur theoretisch funktionieren.
Und warum sollst ausgerechnet du, der von Mikrocontrollern keine Ahnung hat, eine Mikrocontrollerschaltung kreieren? Oder sollte man eigentlich davon ausgehen, daß du das können müsstest und jetzt suchst du ein paar Blöde, die das für dich machen, weil du in den Vorlesungen geschlafen hast?
Das liegt daran, dass wir ins kalte Wasser geworfen werden. Niemand hat Vorkenntnisse bei seinem Part am Projekt. Ich bin auch niemand der seine Arbeit von anderen machen lassen will. Nach meiner Recherche weiß ich nun aber noch immer nicht wirklich, welchen frei im Handel erhältlichen uC ich wählen soll. Desshalb wäre es dufte etwas Anregung oder einen Tipp zu bekommen, welche uC für eine solche Aufgabe geeignet sind.
>Nach meiner Recherche weiß ich nun aber noch immer nicht wirklich, >welchen frei im Handel erhältlichen uC ich wählen soll. Das weiss hier auch keiner solange nicht bekannt ist welche Sensoren verwendet werden sollen.
Mach dir vor dem uC Gedanken, welche Schnittstelle die Sensoren haben, brauchst du AD-Wandler oder SPI oder I2C oder was anderes. Sprich die Außenanschlüsse des Controllers. Dann überlege dir, welche Daten wie schnell verarbeitet werden müssen (Berechnungen? Datenrate? Float oder Ganzzahl). Dann fallen schon einmal viele weg. Für die 12V musst du ohnehin einen Wandler einbauen, denn einen uC für 12V gibt es meines Wissens nicht :)
Mit der 2800er Serie von TI hast du dir gleich die ungewöhlichste Architektur unter den Mikrocontollern ausgesucht. Keine Bytes, sondern nur Words. Komplett 16 Bit basierend. Um das Ding anzusteuern, braucht es sehr viel Erfahrung, dum musst dich Tagelange in diverse Subsystem einlesen. Hardcore C Programmierung. OK, macht schon Spass, habe ich ein paar Jahre gemacht. Aber einem 'Anfänger' würde ich das Teil nicht empfehlen. Bis Semesterende hast du nichts fertig. Orientier dich an der Arduino-Schiene. Manche werden jetzt hier aufjaulen. Aber die 8-Bitter sollten ausreichend Leistung haben. Und man kann auch die 32-bittigen Arms gehen, falls man mehr braucht. Dafür ist die Entwicklungsumgebung schnell installiert, und die API ist einfach gehalten, so dass man schnell zu Ziel kommen kann. 7 Digital Werte und ein Analoger ist ja nicht viel. Kommt höchstens auf das geforderter Timing und den Algorithmus dazwischen an.
Danke euch, das hilft mir schon viel weiter :) Okay, es sollen Signale von folgenden Sensoren einfließen die ich ausgewählt habe: 1 Drehraten- und Beschleunigungssensor https://www.sparkfun.com/products/11977 4 x als Raddrehzahlfühler http://www.conrad.de/ce/de/product/153802/Hall-IC-Infineon-Technologies-TLE-4945-L-35-24-V-PSSO-3-2?ref=list 1 Drucksensor aus einem Hydroaggregat und 1 Lenkwinkelsensor, welche ich noch nicht näher spezifiziert habe da die immer fahrzeugspezifisch sind. Angsteuert werden sollte damit dann dann ein Hydroaggregat und eine Ladepumpe die den Bremsdruck verstärkt. Alle Signale kommen bereits digital an den uC an. Zwischen Drucksensor und Platine kommt ein A/D Wandler, da es analog aus dem Sensor kommt. An den Ausgang des uC dann wieder D/A Wandler für das Hydryaggregat und die Ladepumpe. Soweit mein Konzept bisher =/ Werde mir morgen dann mal Gedanken um die Schnittstellen machen.
Peter M. schrieb: > 4 x als Raddrehzahlfühler > http://www.conrad.de/ce/de/product/153802/Hall-IC-Infineon-Technologies-TLE-4945-L-35-24-V-PSSO-3-2?ref=list das wird wohl schon nichts werden. Der liefert viel zu wenig Impulse je Umdrehung. Bis du dort feststellt, das etwas nicht stimmt, liegt das Auto schon im Graben. dafür werden solche Zahnkränze eingesetzt: http://www.go-performance.de/Media/Shop/abs-zahnkranz.jpg diese werden dann induktiv abgetastet.
PittyJ schrieb: > Orientier dich an der Arduino-Schiene. Manche werden jetzt hier > aufjaulen. Aber die 8-Bitter sollten ausreichend Leistung haben. Und man > kann auch die 32-bittigen Arms gehen, falls man mehr braucht. > Dafür ist die Entwicklungsumgebung schnell installiert, und die API ist > einfach gehalten, so dass man schnell zu Ziel kommen kann. > 7 Digital Werte und ein Analoger ist ja nicht viel. Kommt höchstens auf > das geforderter Timing und den Algorithmus dazwischen an. Nicht schon wieder dieses Arduino Spielzeug für sicherheitskritisch Systeme. Sowas hier ist geeignet und wird auch in ESP systemen eingesetzt. http://www.ti.com/ww/de/prod_mcu_hercules.html Für die notwendige Echtzeitfähigkeit wirst du ein RTOS benötigen. Das alleine schließt Arduino und Co schon aus. Der letzte Schrei in der Richtung nennt sich AUTOSAR. ==> Soll in einer Art Plug&Play ermöglichen das Softwaremodule von einem Steuergerät ins nächste verschoben werden können um den OEM mehr Flexibilität zu ermöglichen. Aber naja Microsoft versucht das mit Plug&Play seid 30 Jahren und das läuft nicht stabil....... Hier mal ein Beispiel für das Blockschaltbild eines solchen Steuergerätes. http://www.infineon.com/cms/de/product/applications/automotive/safety/braking/abs.html Peter M. schrieb: > 1 Drehraten- und Beschleunigungssensor > https://www.sparkfun.com/products/11977 Der hier nützt dir nicht viel. das ist ein 3 AchsGyrp. Du benötigst fürs ESP einen 1 Achs Gyro ( Hochachse) und einen 2 Achs Beschleunigungssensor für Längs und Querachse > > 4 x als Raddrehzahlfühler > http://www.conrad.de/ce/de/product/153802/Hall-IC-Infineon-Technologies-TLE-4945-L-35-24-V-PSSO-3-2?ref=list Der Sensor hier ist speziell für Fahrzeuganwendungen: http://www.infineon.com/cms/en/product/sensor-ics/magnetic-sensors/magnetic-speed-sensors/TLE4941C/productType.html?productType=db3a30442239c7bb01235bae1ba03646 > > 1 Drucksensor aus einem Hydroaggregat und Die Drücke im Bremssystem eines Fahrzeugs sind im Bereich von 0 - ~250 Bar > 1 Lenkwinkelsensor, welche ich noch nicht näher spezifiziert habe da die > immer fahrzeugspezifisch sind. Schönes Thema, da gibt es so einiges. Stichwort Relativsensor, und Absolutsensor, dann gibt es die Magnetisch, Optisch und Kapazitiv. Also viel Spass beim aussuchen. > > Angsteuert werden sollte damit dann dann ein Hydroaggregat und eine > Ladepumpe die den Bremsdruck verstärkt. > > Alle Signale kommen bereits digital an den uC an. Zwischen Drucksensor > und Platine kommt ein A/D Wandler, da es analog aus dem Sensor kommt. Mal drüber nachdenken das mit dem ADC des µC zu machen. Erspart Komponenten und reduziert damit Fehlermöglichkeiten > An den Ausgang des uC dann wieder D/A Wandler für das Hydryaggregat und > die Ladepumpe. DA Wandler und dahinter Leistungsendstufen sind zu teuer und haben zuviel Verlustleistung ( Wärme) Besser geeignet ist hier eine Ansteuerung über PWM mit LeistungsFET. Nur mal so als Tip, Die Pumpe im Fahrzeug läuft ja mit 12 Volt und hat in de Regel eine Absicherung mit 40 - 60 Ampere, Nur mal so um einen Eindruck von der benötigte Leistung zu bekommen > Soweit mein Konzept bisher =/ > > Werde mir morgen dann mal Gedanken um die Schnittstellen machen. Es werden noch ein Paar Signale mehr aus dem Fahrzeug benötigt. Wie zb Motorzustand, ( Drehzahl, Drehmoment,.. ) Getriebezustand, Kupplungsstatus, Gaspedalposition,......... Vieles davon kommt im Fahrzeug über den CAN Bus von anderen Steuergeräten. Auch nicht zu vergessen sind die Lampen die immer so schön blinken. Also ESP / ABs Aktiv, und Fehler Lampen....... Na du wirst im lauf der Zeit noch viele Details finden.... Sieh dir bei Themen in diesem Bereich ( Fahrzeug ) dringend auch mal die ISO 26262 an. Jede Entwicklung muss nach dieser Norm ( oder vergleichbar) laufen.
Peter II schrieb: > http://www.go-performance.de/Media/Shop/abs-zahnkranz.jpg > > diese werden dann induktiv abgetastet. Das ist nicht mehr ganz so Stand der Technik. Um genauer zu sagen die induktive Abtastung gibt es seid mindestens 15 Jahren schon nicht mehr in neuen Fahrzeugen. Standard heute ist ein magnetisch codierter Kranz im Radlager mit 40 - 50 Polpaaren und dazu eine Abtastung über HallEffektsensoren. Aber auch solch ein Zahnkranz lässt sich magnetisch abtasten, man brauch nur zusätzlich zum Hallsensor noch einen Permanentmagneten.
PittyJ schrieb: > Orientier dich an der Arduino-Schiene. Manche werden jetzt hier > aufjaulen. Aber die 8-Bitter sollten ausreichend Leistung haben. Aber leider nicht genügend Timer. Soweit ich weiß werden spezielle TMS470 verwendet: http://www.ti.com/lsds/ti/microcontroller/safety_mcu/tms470_arm_cortex-m3/overview.page?paramCriteria=no Normalerweise braucht man für so ein System eine redundante Prozessorauslegung. Gruß Anja
Wenn er es mit Matlab/Simulink programmieren soll würde ich mir als erstes mal anschauen zu welchen es eine gute Unterstützung von Matlab aus gibt. Am besten kostenfrei... Und wenn man sich das anschaut wird man schnell bei den STM32 landen. Am besten F4... da ist alles bei was man braucht, leicht überdimensioniert... Und das wichtigste es gibt eine komplette gut Ausgestattete Toolbox für Matlab bzw Simulink...
Für die Pics gibts auch sowas, bin mir gerade aber nicht sicher ob kostenlos...
Sonst gibt es noch für die Lego Next Mindstorm was... Vielleicht lässt sich der Prozessor da einfach auf ein anderes Board verwenden (ist glaub ein alter ARM)
Oder Raspberry Pi (wohl eher nicht geeignet Echtzeitfähig GPIO usw...) Arduino geht mittlerweile aber auch.... ist aber halt Arduino... Ich finde wenn man E-Technik studiert sollte man nicht mit sowas ankommen....
Wir haben im Studium etwas ähnliche gemacht und benutzten dafür ein Keil Development Board mit einem LPC2378 von NXP. Das Board war ein MCB2300. Die Hardware war gut. Nur waren wir gezwungen mit der Keil IDE µVision zu arbeiten. Und das ist mit Abstand die schlechteste IDE, die ich je benutzt habe. Schon alleine der Debugger hat etliche Bugs. Lobend kann ich erwähnen, dass es dort eine FreeRTOS Portierung gibt, wegen der Echtzeitgeschichte... Also das Baord / der µC wäre empfehlenswert, wenn man sich eine Alternative zur Keil IDE sucht...
Peter M. schrieb: > Auf dem Mikrocontroller soll dann der generierte C-Code aus einem > Matlab-Simulink Modell laufen. Am sinnvollsten wäre wahrscheinlich eine Controllerplatine von dSpace. Da gibt es erstklassige Einbindung in Simulink, es gibt AUTOSAR und entsprechende Unterstützung für die Vector-Tools. Als Privatmann willst Du sowas nicht bezahlen, aber für Unis und FHs machen die recht faire Preise. Beim selberfrickeln kämpfst Du gegen Hardware und Software gleichzeitig, das ist vielleicht ein bisschen viel auf einmal. Wenn die SW läuft, kann man als Diplom^r^r^rMasterarbeit immer noch eine passende Schaltung und danach Leiterplatte erstellen lassen. Falls Euer Proof of Concept auch in ein Fahrzeug eingebaut werden soll, würde ich die dafür vorgesehenen Sensoren nehmen. In den '90ern lief ESP auf i80196. Das sind für Motorsteuerung optimierte Microcontroller, heute leider ausgestorben. Danach kamen TMS370-Derivate, dann auf TMS470 basierende Controller mit symmetrischer Redundanz (beide Cores führen den gleichen Code aus jeweils eigenem Programmspeicher auch, und eine Logik vergleicht ständig die Zustände auf den internen Busleitungen). Das waren jeweils proprietäre Chips, extra für die Anwendung hergestellt. Heute ist der TMS570 drin, und auf diesem Patent basierende Controller werden auf dem freien Markt unter dem Namen "Hercules Safety Controller" vertrieben. Da könnt Ihr Euch auch ein Evalboard holen, aber die dSpace AutoBox macht das Leben leichter.
Peter M. schrieb: > Also es ist nicht Sicherheitkritisch. Es soll erstmal nur > theoretisch funktionieren. Ist es nicht Sinn dieser Recherche auch die realen Requirements mit zu berücksichtigen? Leider haben wir es auch zu oft, dass bereits die Hardware fertig ist, bevor wir diese für die Software in die Hände bekommen. Und oft genug muss man dann Handstände machen. Auch wenn es "nur zum Lernen ist" würde ich mehr Realitätsnähe ansetzen. Du willst ja auch was dabei lernen.
Ich danke euch allen. Habe jetzt zur nächsten Woche einen Termin mit meinem Prof. gemacht um die genauen Anforderungen zu klären. Dann zeige ich ihm auch meinen aktuellen Stand, der jetzt dank euren Infos in etwa so aussieht: 4x Drehzahlfühler induktiv [1] http://www.conrad.de/ce/de/product/182867/Induktiver-Drehzahlsensor-TT-Electronics-AB-9406200030?ref=searchDetail Oder Hall-Effekt-Sensoren [2] http://www.infineon.com/cms/en/product/sensor-ics/magnetic-sensors/magnetic-speed-sensors/TLE4941C/productType.html?productType=db3a30442239c7bb01235bae1ba03646 Bremsdruck-Sensor Im Hydroaggregat verbaut und fahrzeugspezifisch. Zur Auslegung nutze ich http://www.aim-store.de/de/Zubehoer/Druck/Bremsdruck.html Ausgang: 0-5V analog Drehratensensor http://www.watterott.com/de/ADXRS620-Breakout?xa9052=9c72c80f4b05302b15f2ac22d498c068 Beschleunigungssensor http://www.kelag.ch/de/industrie/beschleunigung-vibration/kas804-serie/2-achsiger-beschleunigungs-und-neigungssensor-kas804 (im KFZ meist Drehraten- und Beschleunigungssensor in einem) Lenkwinkelsensor Sollte 1440° erfassen können (-720° bis +720°) Frei erhältlich leider nicht zu finden, deshalb zur Platinen-Auslegung evtl. erstmal http://www.conrad.de/ce/de/product/276149/Winkel-Positions-Sensor-AN8-Cherry-Switches-AN820032-Messbereiche-360-?ref=searchDetail ECU dspace Autobox http://www.dspace.com/de/gmb/home/products/hw/accessories/autobox.cfm oder Hercules Safety Controller 8 (TMS570) http://www.ti.com/ww/en/launchpad/launchpads-hercules.html?DCMP=herc-launchpad&HQS=herc-launchpad-b - - - - - - - - - - - - - - - - - Die Motorsteuerung wird in unserem Stabilitätsprogramm vernachlässigt, genauso wie die Lampen. Ja mit den Schnittstellen, das wird auch noch ein Problem für mich :) Dafür werde ich mir, nachdem die Sensoren von meinem Prof. akzeptiert wurden die Ausgangssignale genauer anschauen.
Angehängte Dateien:
-

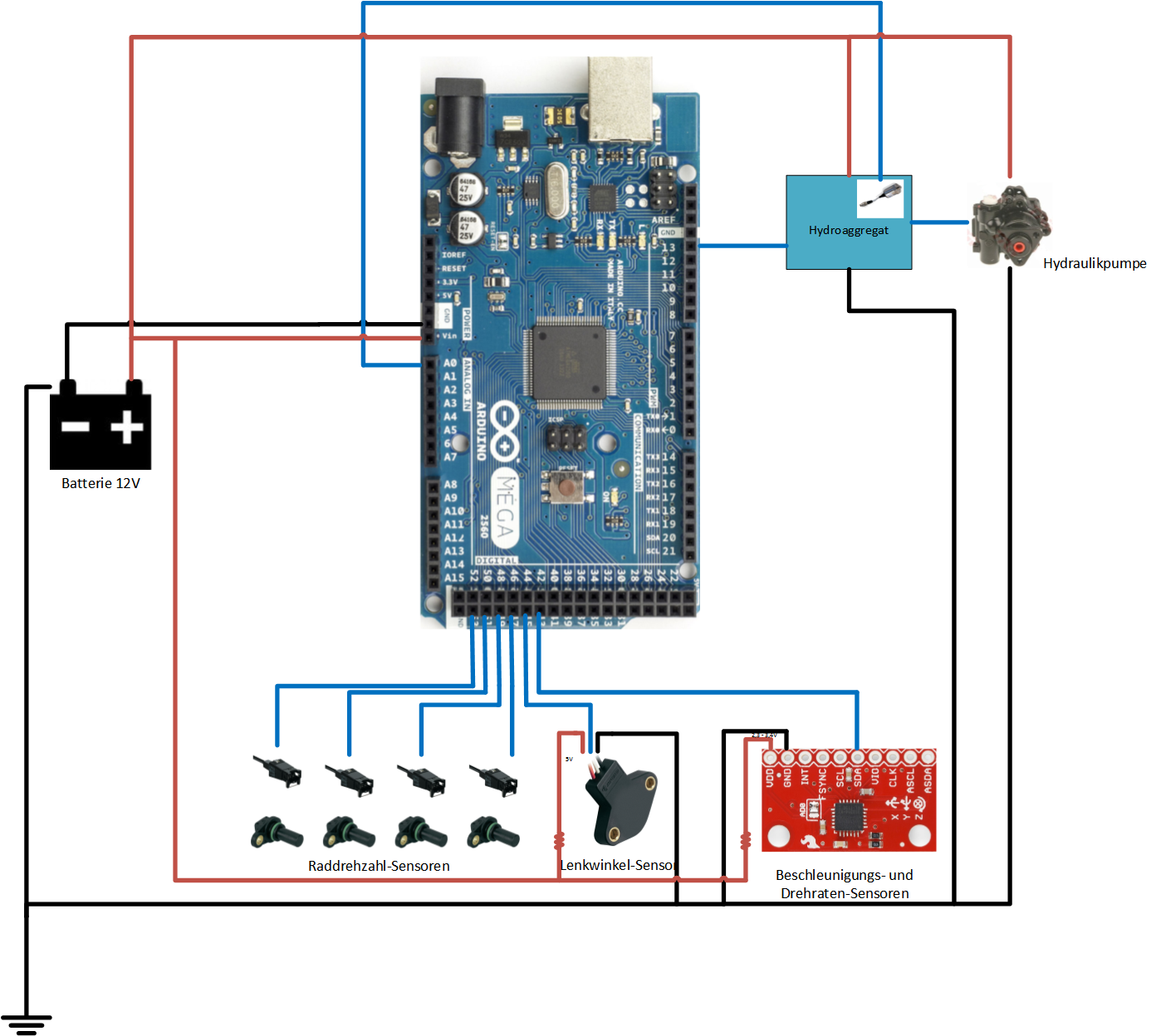
Schaltung.png
530 KB
{kind=link}
Guten Tag, es ist ein Arduino geworden. http://arduino.cc/de/Main/ArduinoBoardMega2560 Der erste Schaltungsentwurf ist im Anhang. Irgendwelche Auffälligkeiten (Dummheiten) zu sehen? Hydroaggregat(Drucksensor) - analog in Hydroaggregat(Steuerung) - analog mittels PWM Raddrehzahlsensoren - digital in Lenkwinkelsensor - digital in gyro und beschleunigungssensor - digital in Ist es richtig, dass die die Sensoren an die Batterie angeschlossen und die Betriebsspannung dann mittels eines Vorwiderstand eingestellt wird? Oder sollten sie ihre Spannung über den Microcontroller erhalten?
Peter M. schrieb: > Der erste Schaltungsentwurf ist im Anhang. Irgendwelche Auffälligkeiten > (Dummheiten) zu sehen? Wenn das ganze in einem Kfz eingebaut werden soll, dann benötigst Du auf jeden Fall ein geeignetes Versorgungsspannungskonzept. Es reicht definitiv nicht aus, den Arduino direkt ans Netz anzuschließen. Dieses Thema wird hier mindestens zehnmal pro Woche diskutiert. Für die allererste Orientierung solltest Du Dich am Kapitel F23 der de.sci.electronics-FAQ orientieren: www.dse-faq.elektronik-kompendium.de/dse-faq.htm Die störsichere Auslegung der Sensoranschlüsse ist auch schon eine ordentliche Herausforderung. Dabei kommt es auch darauf an, ob die Sensoren elektrisch mit der Karosserie verbunden werden müssen oder nicht. > Ist es richtig, dass die die Sensoren an die Batterie angeschlossen und > die Betriebsspannung dann mittels eines Vorwiderstand eingestellt wird? Nein... > Oder sollten sie ihre Spannung über den Microcontroller erhalten? Ähem, der Microcontroller selbst wird sicherlich nicht die Sensoren versorgen. Es spricht allerdings viel dafür, die Sensorstromversorgung auf derselben Leiterplatte zu realisieren. Bei der Verwendung eines Arduino als Aufsteckmodul hat man in der Basisleiterplatte genug Möglichkeiten, die ganzen Spannungsregler, Störschutzmaßnahmen, usw. zu realisieren.
Ich gebe zu bedenken, dass der aus Simulink/RTW generierte C-Code alles andere als effizient (Kenntnisstand 2012) ist und du mit dem Mega2560 vermutlich schnell an die Grenzen stößt. Außerdem ist es entscheidend, bereits bei der Modellierung auf die Portierbarkeit zu achten. Mache nicht den gleichen Fehler wie meine Kollegen vor ein paar Jahren, durch das Tal der Tränen zu kommen dauerte lange und war schmerzhaft.
Nachtrag: Falls Du ernsthaft modellbasiert entwickeln willst, empfehle ich SCADE von Esterel/Ansys. (Zertifizierbare Toolchain bis hin zu DO-178C Level A, Automotive entsprechend.)
Peter M. schrieb: > Auf dem Mikrocontroller soll dann der generierte C-Code aus einem > Matlab-Simulink Modell laufen. Afaik gibts von Mathworks fertige Toolboxen für einige Controller, mit denen Code direkt für den Controller erzeugt werden kann. Eventuell an denen orientieren?
Ich frage mich warum die professionellen OEMs mit einem Haufen Ingenieuren ca. 2 Jahre brauchen um ein bestehendes ESP auf ein neues Fahrzeug zu adaptieren und serienreif zu bekommen ?! Das wird doch nix als Studienarbeit oder willst du die erst in 10 Jahren abgeben ? Und ein (sorry für das wording) popliger 8bittiger AT-Mega für harte Echtzeitanforderungen. Ich weiß nicht. Du willst ja nicht nur alle paar Minuten einen Regeleingriff machen. Übliche Reaktionszeiten für ESP liegen im Bereich 10..50ms. Wie schon erwähnt, benögigt ein ESP auch Singale die über den Fahrzeug-CAN kommen. Es muß z.B. auch das Motordrehmoment drosseln (incl. Getriebesteuerung) können um die Bremsanage nicht zu überlasten. Bei voller Motorleistung eine Vollbremsung hinzulegen macht keinen Sinn. Daher drosselt das ESP bie Motorleistung wenn es in die Fahrzeugdynamik eingreift. Der AT-Mega wird seine Rechenzeit allein damit verbringen die Eingangssignale einzusammeln und vorzuverabeiten (saklieren, filtern, plausibilisieren, ...). Wie oben beschrieben, werden die 4 Raddrehzahlen über Zankränze abgegriffen. Bei 100 Impulsen pro Radumdrehung kommt da bei 100km/h einiges an Pulsen zusammen. Die OEMs setzen hier spezielle Timerbausteine mit Event-FiFos ein um den Controller nicht mit den Drehzahl-Interrupts tot zu machen. Und ganz ehrlich: Ich wäre von meiner Arbeit nicht so überzeugt, dass ich damit in einem Auto durch die Gegend fahren wollte. Selle dir nur einmal vor dein uC reagiert nicht mehr und ein Rad blockiert. Du landest sofort im Acker, zumal du ja sicher auch keine Erfahrung/Ausbildung als Testfahrer hast. Stelle dir nur einmal vor was im System alles schief gehen kann und überlege welche Gegenmaßnahmen notwenig/sinnvoll sind (z.B. wenn ein Sensor ausfällt oder ein Ventil klemmt). Bei 250Bar Druck fliegt dir unter Umständen deine schöne Platine samt Hydraulikblock um die Ohren. Das ganze am Computer mit Matlab/Simulink zu simulieren ist eine Sache, aber die harte Realität sieht leider (oder zum Glück) anders aus. Sonst könnte ja jeder mal eben so sein eigenes ESP bauen.
Peter M. schrieb: > es ist ein Arduino geworden. > http://arduino.cc/de/Main/ArduinoBoardMega2560 zu klein und zu schwach. Wenn du damit anfängst wirst du sehr schnell auf ARM wechseln und von vorne anfangen. ECU Programmer schrieb: > Und ein (sorry für das wording) popliger 8bittiger AT-Mega für harte > Echtzeitanforderungen. Ich weiß nicht. Du willst ja nicht nur alle paar > Minuten einen Regeleingriff machen. Übliche Reaktionszeiten für ESP > liegen im Bereich 10..50ms. > > Wie schon erwähnt, benögigt ein ESP auch Singale die über den > Fahrzeug-CAN kommen. Es muß z.B. auch das Motordrehmoment drosseln > (incl. Getriebesteuerung) können um die Bremsanage nicht zu überlasten. > Bei voller Motorleistung eine Vollbremsung hinzulegen macht keinen Sinn. > Daher drosselt das ESP bie Motorleistung wenn es in die Fahrzeugdynamik > eingreift. > > Der AT-Mega wird seine Rechenzeit allein damit verbringen die > Eingangssignale einzusammeln und vorzuverabeiten (saklieren, filtern, > plausibilisieren, ...). > > Wie oben beschrieben, werden die 4 Raddrehzahlen über Zankränze > abgegriffen. Bei 100 Impulsen pro Radumdrehung kommt da bei 100km/h > einiges an Pulsen zusammen. Dem kann ich nur zustimmen. Rechne bei den Radsensoren mal mit Fmax von ca 2,5 KHz. Und das vier mal. Ob die Sensoren direkt an die 12 Volt können oder Spannungsregler brauchen musst du den Datenblättern entnehmen. Sind es Automotiv Radsensoren können die direkt an die Ubat. Besser ist aber wenn du alle Zu und Abgänge der Sensoren über elektronische Schalter führst damit diese beim einem Kurzschluß abgekoppelt werden können.
ECU Programmer schrieb: > Das ganze am Computer mit Matlab/Simulink zu simulieren ist eine Sache, > aber die harte Realität sieht leider (oder zum Glück) anders aus. Sonst > könnte ja jeder mal eben so sein eigenes ESP bauen. für Prototypen-Fahrzeuge und erste Versuche mit neuen Funktionen ist Bosch-ESP mit MABx im Bypassing und Funktionsentwicklung im Simulink heute ganz normal beim OEM... Ansonsten klingt das alles nach typ. studentischem Projekt ohne Anspruch für Serie um mal die Basics zu lernen. Ein einfachs ESP mit Einspurmodell etc. ist da in ein paar Tagen implementierbar und der Lerneffekt nicht zu vernachlässigen. Wir machen sowas teilweise mit Absolventen als Einarbeitungsprogramm auf einem RC-Car...
Das das kein serientaugliches ESP wird, sollte allen klar sein. Das ist eine studentische Übung, nicht mehr! Ich finds allerdings trotzdem lustig. Ursprünglich hiess es noch, er muss nur die Platine designen. Jetzt ist es ein Arduino und er stellt Fragen zum Anschluss von Sensoren, dass es mir die Zehennägel einrollt. Da frag ich mich: wie bitte soll so jemand eine Platine designen?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.