
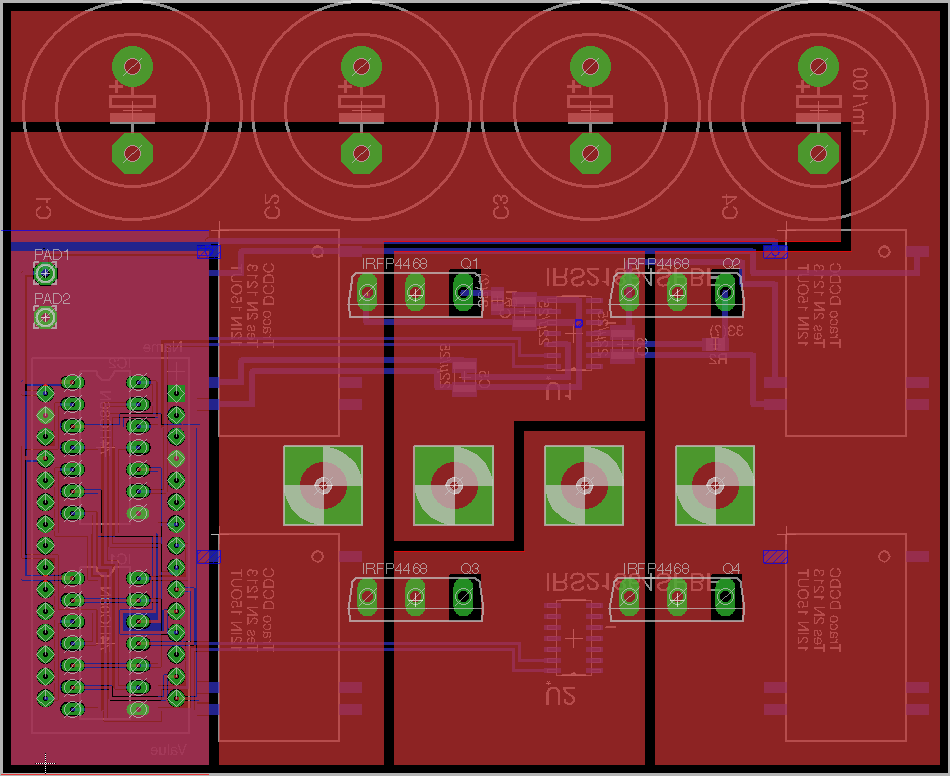
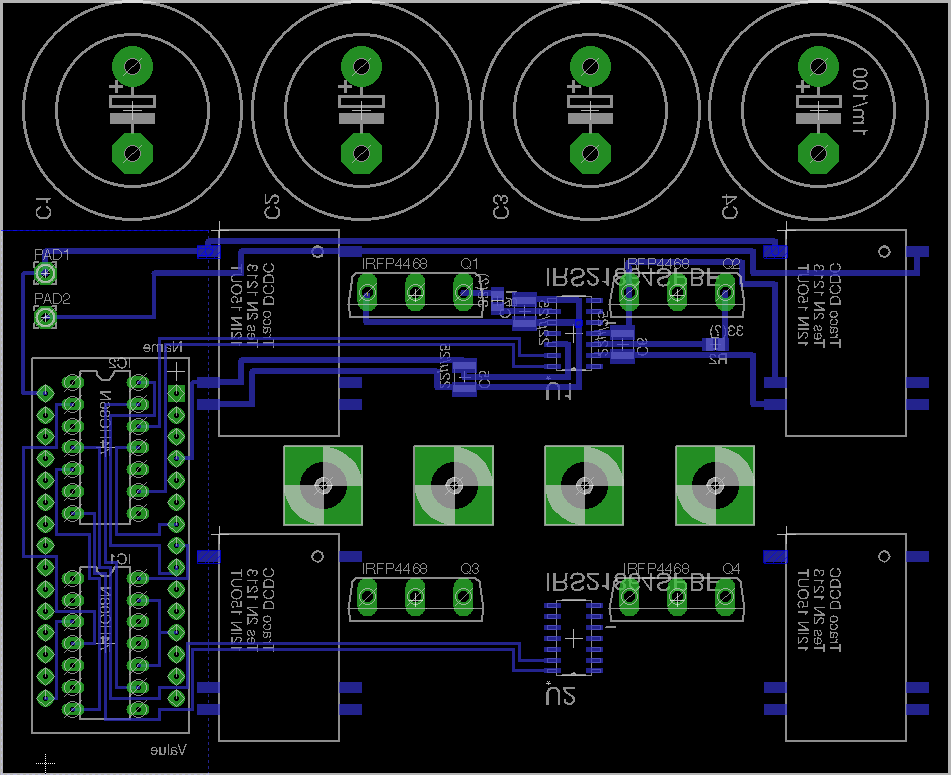
Hallo, ich habe bis jetzt einiges hier gelesen und muss sagen, dass viele Beiträge sehr aufschlussreich waren und mich viel weiter gebracht haben, SUPER FORUM! Aber nun bin ich an einem Punkt, wo ich doch konkreten Rat brauche. Ich überlege einen Eigenbau für eine Motorsteuerung, der Antrieb soll in ein Boot eingebaut werden. Das macht einige der die Ansteuerung betreffenden Aspekte weniger kritisch, andererseits gibt es auch besondere Anforderungen, vergleicht man es mit einem Straßenfahrzeug zum Beispiel. Ganz wichtig: Ich kann mir auch was fertiges kaufen, aber darum geht es mir nicht. Wahrscheinlich werde ich mir dann einen kaufen, nachdem mir die eigenen Konstruktionen zum x-ten Mal um die Ohren geflogen sind, dann ist es eben so. Ich versuche also realistisch zu bleiben und habe die viele Hinweise hier wirklich beherzigt, nehme ein potentielles Scheitern in Kauf, setze den Schutzhelm auf und hoffe, am Ende einiges mehr gelernt zu haben. Wissbegierde und Spaß beim Selbermachen sind meine Motivationen. hier die Eckdaten: - 48v (erstmal) - 110/200A (Vollast/Spitzenlast kurzzeitig) Als Motor soll der bewährte PMG 132 eingesetzt werden, ein DC-Scheibenläufer mit Bürsten. http://www.heinzmann.com/de/elektromotoren-und-hybridantriebe/scheibenlaeufermotor/gleichstrommotor Schaltungskonzept: - pwm 20kHz - Erzeugung und Steuerung mit ATmega328 - H-Brücke mit HighLowside Treibern, mal gewählt den 21864 von ir - Highside mit DCDC-Versorgung für 100% Tastverhältnis Layoutkonzept: - die Mosfets auf der einen Seite, der Rest auf der Anderen - Leiterbahnen auf der Mosfetseite nur VCC, GND, M1 und M2, einfachste Formen, dass man sie auch aus einem Cu-Blech machen kann. - Ausnahme davon die Ecke mit dem µC und den Anschlüssen mit weniger A Fragen (tausende, hier die vordringlichsten): - kann ich mit den galvanisch trennenden DCDC-Konvertern und dem 21864, der auch einen vom COM getrennten VSS hat, auf die galvanische Trennung (opto-Koppler oder wie auch immer) verzichten? - brauche ich dann vier von den Wandlern, für jede Halbbrücke einen? - brauche ich die Gate-Widerstände (lahmer Mosfet 4468 mit hoher Qg von ca 500nC) - die Kondensatoren auf der Out-Seite der Wandler würde ich gerne als SMD-Kerkos direkt neben die Versorgungspins der Treiberbausteine packen, reichen da 22µF (zuviel, zuwenig, habe den größten Wert vom Reichelt-Sortiment genommen, aber manchmal ist ja weniger mehr, hier habe ich keinen Rechenansatz, im Datenblatt der Wandler steht ein Maxwert von 110µF kapazitive Last) - ist meine Bauteilwahl einigermaßen passend? - kann ich mit dem Layoutkonzept so weiter machen, oder passt irgendwas die Leitungslängen, Führung, oder Anordnung der Bauteile GAR NICHT? Was ich erstmal noch nicht gezeichnet habe, aber schon im Hinterkopf: - rechte Halbbrücke Schaltplan und Layout - Anschlüsse Steuerleitungen Atmega - Pulldownwiderstände Ausgänge Atmega - Z-Dioden 18V c5 bis C7 - Transil-Diode C1 bis C4 Ich freue mich auf Kritik, her damit! Ach ja, auch wenn es nicht unbedingt in die heutige Zeit passt (zu mir passt es schon), ein Buchtip zur Leistungselektronik / Motorsteuerung würde mich auch sehr freuen. wo
Angehängte Dateien:
-

br05_sch.png
18 KB -

br05_brd_beide.png
32 KB -

br05_brd_unten.png
28 KB
@ Wolfgang Rehn (5fach-steckdose) >zu haben. Wissbegierde und Spaß beim Selbermachen sind meine >Motivationen. Gut. >- 48v (erstmal) >- 110/200A (Vollast/Spitzenlast kurzzeitig) 10kW! >http://www.heinzmann.com/de/elektromotoren-und-hyb... Hmm. >- pwm 20kHz Wahrscheinlich zu hoch >- Erzeugung und Steuerung mit ATmega328 >- H-Brücke mit HighLowside Treibern, mal gewählt den 21864 von ir >- Highside mit DCDC-Versorgung für 100% Tastverhältnis Naja, das ist der einfache Teil ;-) >- die Mosfets auf der einen Seite, der Rest auf der Anderen Bei 110A Dauerstrom? Wie dick soll das Kupfer sein? 2mm? ;-) >- Leiterbahnen auf der Mosfetseite nur VCC, GND, M1 und M2, einfachste >Formen, dass man sie auch aus einem Cu-Blech machen kann. >- Ausnahme davon die Ecke mit dem µC und den Anschlüssen mit weniger A Wo ist der Kühlkörper? Wo ist die Strommessung und der Komparator zu Schnellabschaltung? >Fragen (tausende, hier die vordringlichsten): >- kann ich mit den galvanisch trennenden DCDC-Konvertern und dem 21864, >der auch einen vom COM getrennten VSS hat, auf die galvanische Trennung >(opto-Koppler oder wie auch immer) verzichten? Ja. >- brauche ich dann vier von den Wandlern, für jede Halbbrücke einen? Nö, 2. Du musst ja nur die High Side versorgen. >- brauche ich die Gate-Widerstände (lahmer Mosfet 4468 mit hoher Qg von >ca 500nC) Puhh! ja, die braucht man. Aber eher im einstelligen Ohmbereich. >- die Kondensatoren auf der Out-Seite der Wandler würde ich gerne als >SMD-Kerkos direkt neben die Versorgungspins der Treiberbausteine packen, >reichen da 22µF (zuviel, zuwenig, habe den größten Wert vom >Reichelt-Sortiment genommen, aber manchmal ist ja weniger mehr, hier >habe ich keinen Rechenansatz, im Datenblatt der Wandler steht ein >Maxwert von 110µF kapazitive Last) Soviel braucht man hier nicht, 1-5uF sollten locker reichen. >- ist meine Bauteilwahl einigermaßen passend? Man braucht deulich mehr als nur passende Bauteile. Fang mal mit einem sauberein Schaltplan an, das ist was einfaches zu Einstieg. Schaltplan richtig zeichnen >- kann ich mit dem Layoutkonzept so weiter machen, oder passt irgendwas >die Leitungslängen, Führung, oder Anordnung der Bauteile GAR NICHT? Kühlung? Mal GERECHNET, was dort für Widerstände und Verlustleistungen anfallen? Schon mal drüber nachgedacht, dass man 110A DAUERHAFT eher nicht durch dünne TO220 Beinchen pressen will? Die Hälfte ist sportlich genug.
Danke für die schnelle Antwort! Falk Brunner schrieb: > 10kW! Ich habe folgende eingrenzende Betriebssituation, das relativiert die Leistungsanforderung: - ein Boot (hier mein Boot) fährt in der Regel 95% der Zeit mit deutlich geringerer Leistung als volle Fahrt voraus , mehr bringt bei einem Verdränger auch nichts, nach Drehmomentberechnung wird volle Fahrt voraus schon bei 24V/110A erreicht, Normalbetrieb (normale Fahrt) schon bei wesentlich weniger, also grob 1kW. - in Notsituationen braucht man auf dem Wasser Reserven, dafür die Auslegung auf ca 5KW. - die 10kW als Last gibt es eigentlich nicht, Weil der Motor gar nicht so viel ziehen kann (es sie denn, der Propeller steckt im Schlamm) aber es gibt die Situation, dass schnell von voll voraus auf voll rückwärts geschaltet werden muss, hier werden hohe Ströme fließen, wenn auch nur kurzzeitig. >>- pwm 20kHz > > Wahrscheinlich zu hoch Der Motor hat eine geringe Induktivität, ein Scheibenläufer eben, ich habe als untere sinnvolle Grenze 16kHz ausgerechnet, das benutzt auch: http://www.4qd.co.uk/prod/4qd.html Geräuschentwicklung ist auch ein nicht zu unterschätzender Faktor, das begründet auch meine Wahl zu Ungunsten eines BLDC-Motors. In den Torqueedo-Antrieben sind solche verbaut und diese hören sich, gerade bei Teillast, echt ekelhaft an. http://www.torqeedo.com/produkte/cruise-r-mit-ferngaslenkung-dinghies-segelboote-motorboote-bis-4-t/cruise-r-technische-daten-a-masse > Bei 110A Dauerstrom? Wie dick soll das Kupfer sein? 2mm? ;-) warum nicht 2mm? Fällt mir leichter zu bauen als einen ordentlichen Schaltplan zu zeichnen... > Wo ist der Kühlkörper? Der Bootsrumpf aus Stahl ist im Prinzip der Kühlkörper, ich sehe hier nicht wirklich ein Problem, Ableitung der Wärme mittels Aluminiumstrangpofilen, ähnlich wie beim Cougar-Controller. Ich habe aber probehalber mal ausgerechnet, wie groß der Kühlkörper sein müsste, wenn luftgekühlt - kann man vergessen, so groß -, wenn der Mosfet unter 100°C bleiben soll. Wie rechnen das eigentlich die aus der Modellbau-Ecke, da bibt es Streichholzschachtel große Kästchen, die mit 14s@200A werben? http://www.helifreak.com/showthread.php?t=443322 > Wo ist die Strommessung und der Komparator zu Schnellabschaltung? Ich würde gerne auf Shunts verzichten und die Strommessung nach dem Stromzangenprinzip (Hallsensor) an M1 und M2 vornehmen, ich bin aber noch unentschlossen, eventuell geht es mit Shunts (für mich) doch einfacher. Komparator habe ich noch nicht berücksichtigt, danke für den Hinweis. >>Fragen (tausende, hier die vordringlichsten): >>- kann ich mit den galvanisch trennenden DCDC-Konvertern und dem 21864, >>der auch einen vom COM getrennten VSS hat, auf die galvanische Trennung >>(opto-Koppler oder wie auch immer) verzichten? > > Ja. Das ist gut. > Puhh! ja, die braucht man. Aber eher im einstelligen Ohmbereich. OK > Soviel braucht man hier nicht, 1-5uF sollten locker reichen. OK > Schaltplan richtig zeichnen Danke, mach ich. > Kühlung? > Mal GERECHNET, was dort für Widerstände und Verlustleistungen anfallen? > Schon mal drüber nachgedacht, dass man 110A DAUERHAFT eher nicht durch > dünne TO220 Beinchen pressen will? Die Hälfte ist sportlich genug. Der Mosfet ist TO247, aber egal, so viel dicker sind die Beinchen auch nicht. Kühlung siehe oben, Verlustleistung habe ich mit 80W bei Vollast grob ermittelt, der tatsächliche Dauerbetrieb verlangt letztendlich wohl deutlich weniger, aber es braucht Reserven! Ein Boot kann man nicht am Straßenrand abstellen, wenn der Antrieb ausfällt, das treibt aufs Meer - nicht gut. wo
Wolfgang Rehn schrieb: > > Ich überlege einen Eigenbau für eine Motorsteuerung, der Antrieb soll in > ein Boot eingebaut werden. Das macht einige der die Ansteuerung > betreffenden Aspekte weniger kritisch, andererseits gibt es auch > besondere Anforderungen, vergleicht man es mit einem Straßenfahrzeug zum > Beispiel. > > Ganz wichtig: Ich kann mir auch was fertiges kaufen, aber darum geht es > mir nicht. Prinzipiell ist das Interesse an Eigenbau ja begüßenswert. Aber überleg Dir ob es das Entwicklungs-Risiko und den finanziellen Aufwand einer Einzelentwicklung lohnt, wenn man (siehe Deinen Link zu 4qd) so ein Teil für ca. 500 euro fertig und mit Gewährleistung kaufen kann.
Angehängte Dateien:
-

12_sch.png
41 KB -

12_brd.png
100 KB
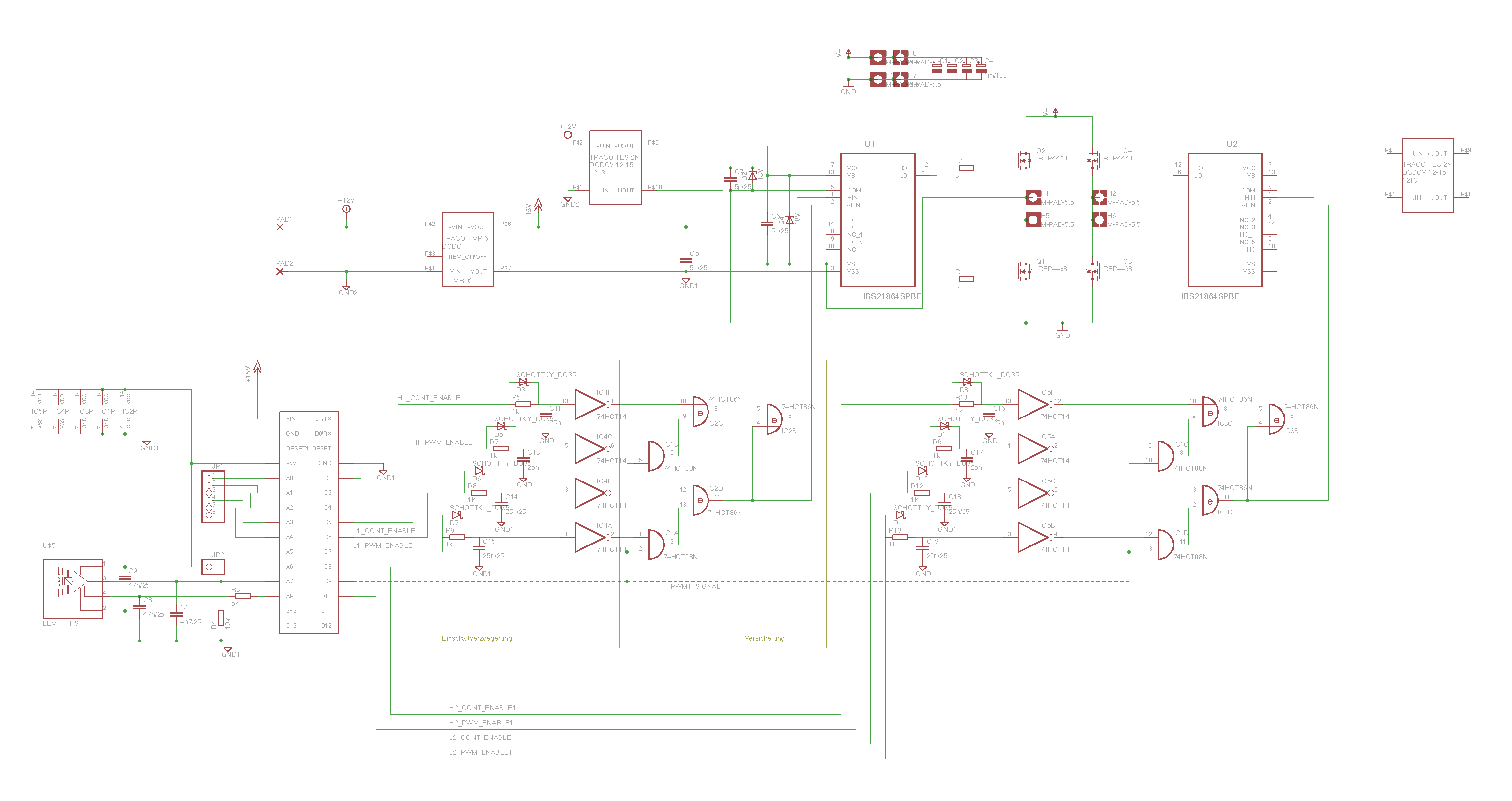
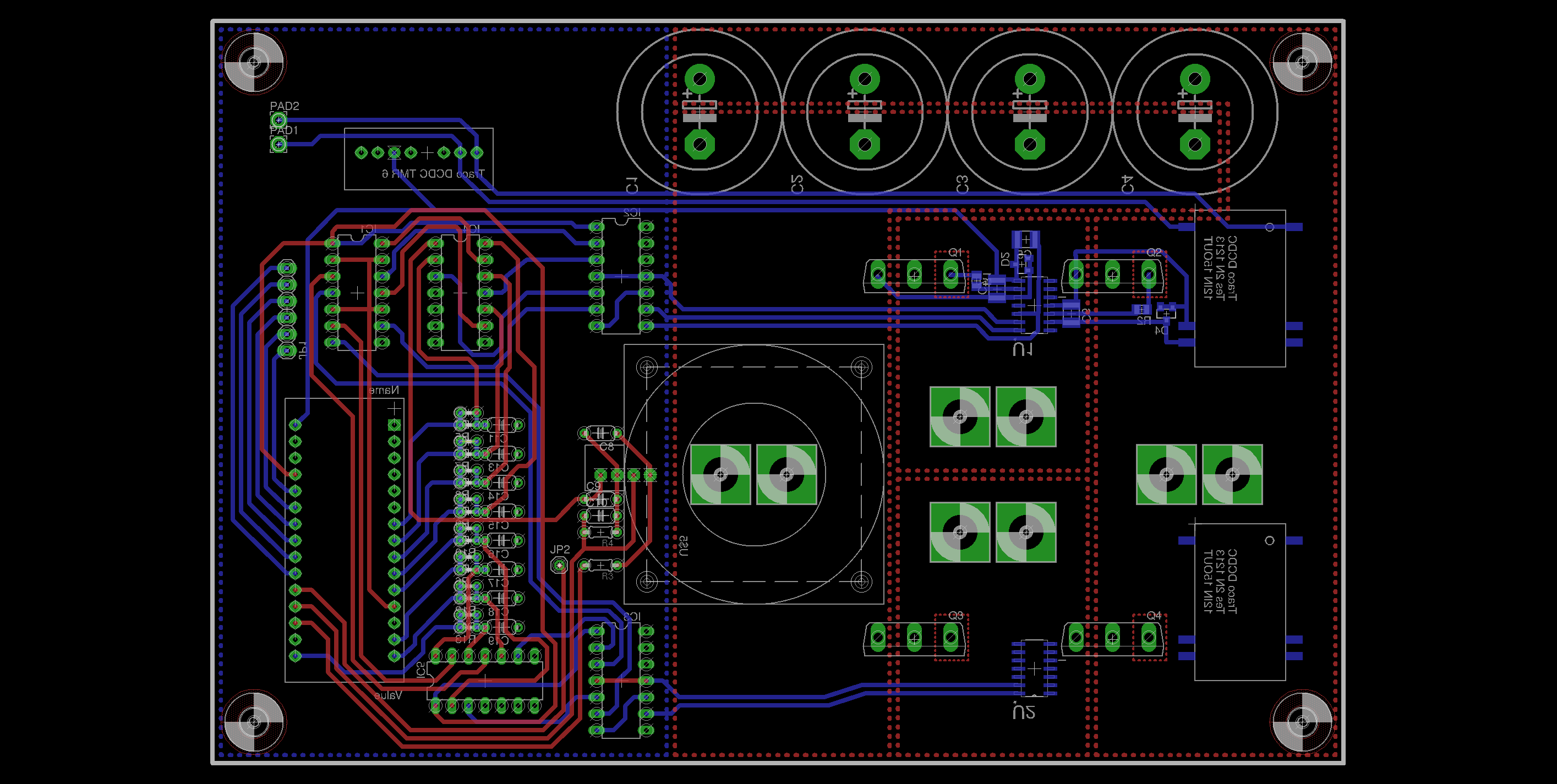
Andrew Taylor schrieb: >... Aber überleg Dir ob es das Entwicklungs-Risiko und den finanziellen > Aufwand einer Einzelentwicklung lohnt, > wenn man (siehe Deinen Link zu 4qd) so ein Teil für ca. 500 euro fertig > und mit Gewährleistung kaufen kann. Das (Kaufen) werde ich auf jeden Fall machen, wird aber als erstes aufgeschraubt, insofern Gewährleistung wohl dahin, aber egal. Risiko und Aufwand sehe ich, nimmt mir aber (noch) nicht die Lust am weitermachen. Ich habe Schaltplan und Layout angepasst, siehe Anhang: - Strommessung ist induktiv vorgesehen, mit einem LEM an der Masseleitung. - Einschaltverzögerung für die Enable-Ausgänge mit RC Schmitt-Trigger Kombi - Hardwareversicherung gegen gleichzeitiges Einschalten von H und L (soll ja eigentlich die Software leisten - aber man weiss ja nie) - auch die Versorgung µC und Logig ist als galv getrennter DCDC-Konverter umgesetzt, die 12v werden aus einem Akku der 4 des 48V-Netzes bezogen, insofern wäre es mir nicht ganz geheuer, die direkt zu verwenden. Neue Fragen: - Wann messe ich denn eigentlich den Strom am besten, in der Phasenmitte oder gemittelt über einen Tiefpass? Für die Ermittlung der Leistungsgrenze des Systems wäre die gemittelte Stromstärke interessant, aber warum wird dann in diversen Beiträgen davon gesprochen, die sym PWM hätte den Vorteil, die Strommessung genau in Phasenmitte vornehmen zu können? - Ich hab jetzt 3 GNDse, Massefläche im Logikteil oder besser nicht? Ich tendiere zu letzterem, habe schon viel gelesen, hier im Forum und sonstwo, aber keine Klarheit gewonnen. - Leiterbahnen im Logikteilso kurz wie möglich, direktester Weg, sinnvoll oder gar erforderlich?. Ich habe es erstmal anders gemacht, alte Bastlerpräferenz, also auf Vias und Bahnen zwischen den DIL14-Pins komplett verzichtet. Alte aber leider noch unbeantwortete Frage: - Literaturtip (kann doch nicht sein, dass es kein Buch gibt). wo
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.