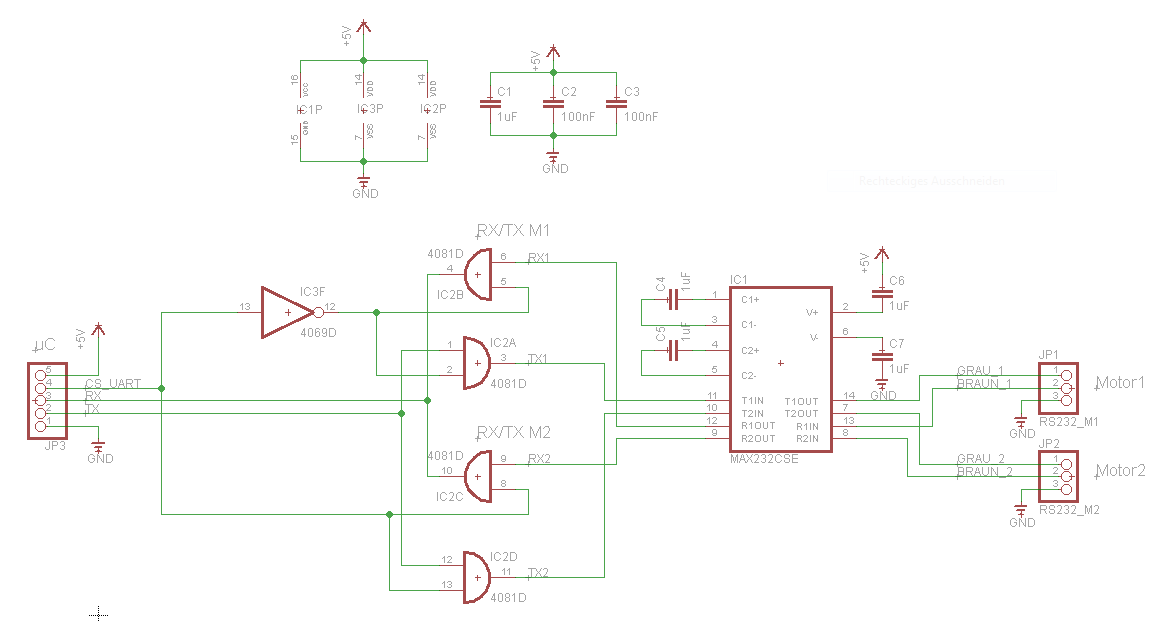
Hallo Zusammen... Ich möchte zwei Schrittmotoren steuern, die jeweils über die Serielle Schnittstelle ihre Befehle erhalten. Jetzt habe ich leider an meinem Mikrocontroller keine weitere Schnittstelle mehr frei und habe mir eine Schaltung überlegt, mit der ich umschalten kann. Ich möchte Befehle auch lediglich senden und nicht die Antwort abwarten. Jetzt wäre meine Frage an euch, was haltet ihr von dieser Schaltung? Hat jmd so etwas schon mach in der Art gemacht? Vielen Dank im Voraus.... Marc
Angehängte Dateien:
-

Serial_Multiplex.PNG
11 KB
Marc M. schrieb: > was haltet ihr von dieser Schaltung? Keine gute Idee die Ausgänge von IC2B und IC2C zu verbinden, was passiert wohl wenn einer High und der andere Low ausgeben will? Wenn du bei dieser Schaltung bleiben willst musst du die beiden Ausgänge verodern oder den MUX aus NAND aufbauen, dann kannst du dir den Inverter sparen und brauchst dadurch nicht mehr ICs: http://nand2tetris-questions-and-answers-forum.32033.n3.nabble.com/file/n4026465/nand-mux.gif Du könntest MUX und DEMUX auch mit dem CD4053 realisieren, dieser braucht dann aber Pullups an den Ausgängen, da die deaktivierten Ausgänge auf High-Z geschalten werden. Wenn die Schrittmotoren nichts senden, wenn sie nicht angesprochen werden, kannst du die Leitungen Motor-->µC auch mit einem AND verbinden, da der Ruhepegel '1' (auf CMOS Seite High) ist.
Vielen Dank für die Schnelle Antwort.. Mit den zwei zusammengeschalteten Ausgängen hast du vollkommen recht. Hatte ich ganz übersehen. Ich mache mich gerade mal schlau wie ich den Cd4053 anschließe... Dabei bin ich aber auch auf CD4052 gestoßen... Was hältst du von dem? Bzw hat der 4053 einen Vorteil den ich gerade noch nicht sehe?
Marc M. schrieb: > Ich mache mich gerade mal schlau wie ich den Cd4053 anschließe... > Dabei bin ich aber auch auf CD4052 gestoßen... Was hältst du von dem? Da du nur zwei Kanäle (Rx, Tx) hast kannst du beide verwenden.
Marc M. schrieb: > Bzw hat der 4053 einen Vorteil den ich gerade noch nicht sehe? Der 4053 ist ein 1:2 MUX/DEMUX, der 4052 ein 1:4 MUX/DEMUX. Da du zwei Schrittmotoren hast war der 1:2 MUX/DEMUX naheliegender
Angehängte Dateien:
-

Serial_Multiplex_2.PNG
8,6 KB
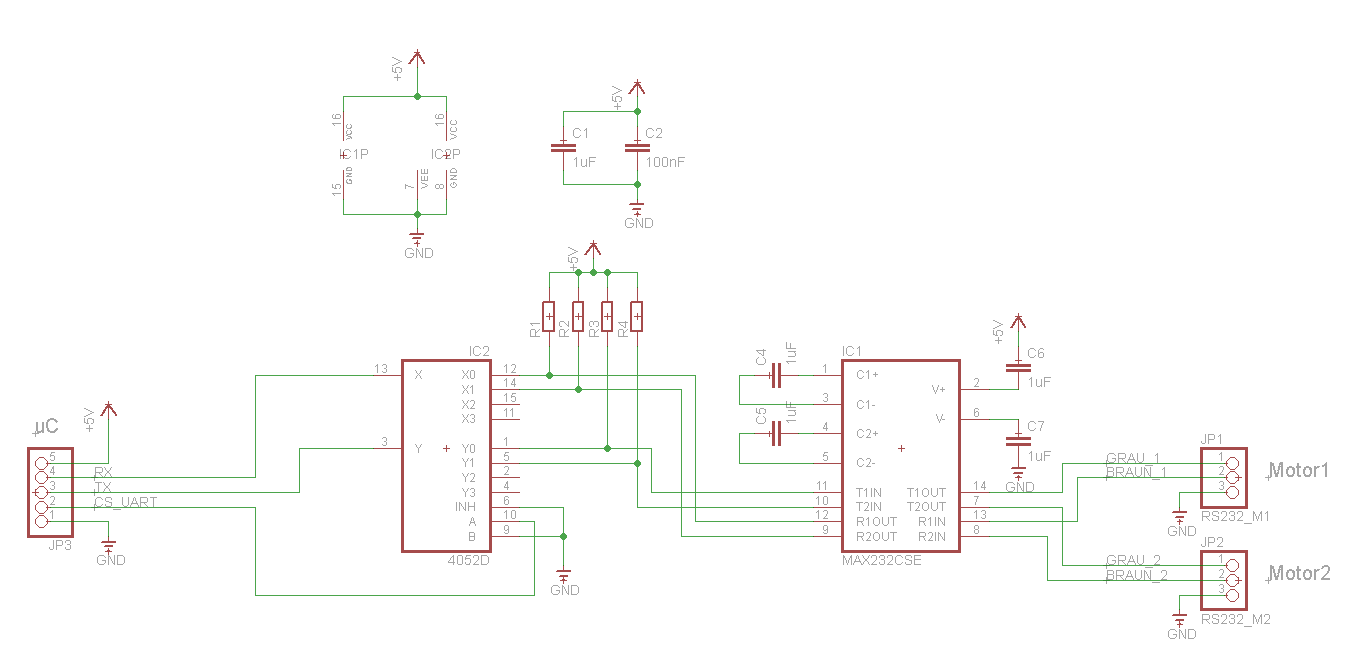
Oky... ;) Habe jetzt mal die Schaltung zusammengebaut.. Benötige ich auch Pullup- oder Pulldown-Widerstände auf der uC Seite?
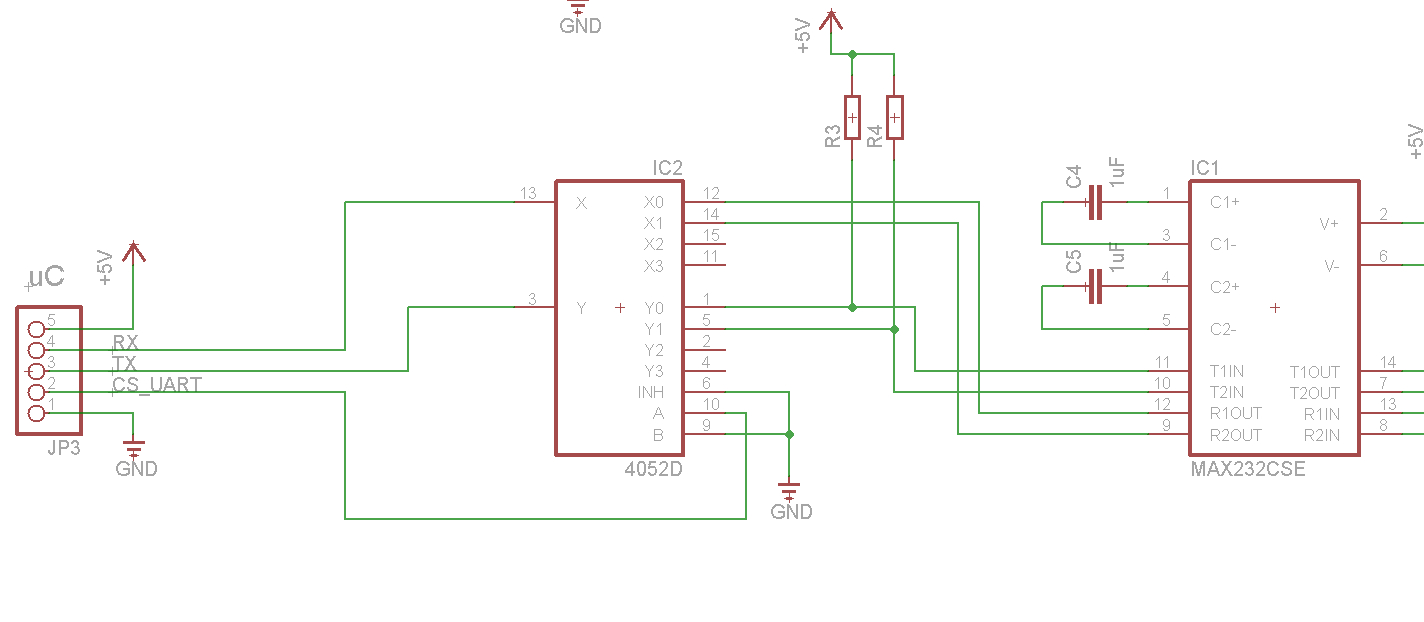
Also die Pull-Ups bei X0 und X1? Dafür aber einen bei x? oder bin ich gerade ganz verkehrt?
Marc M. schrieb: > Benötige ich auch Pullup- oder Pulldown-Widerstände auf der uC Seite? Keine, Tx(µC) wird vom Push-Pull Ausgang des µs auf einen definierten Pegel gebrach, Rx(µC) ist immer mit einem der beiden Ausgänge des MAX232 verbunden. Die Pullups in der Leitung Schrittmotoren --> µC kannst du dir sparen, da der MAX232 für einen definierten Pegel sorgt. Das einzige Problem hast du an Pin 1/5, da immer nur eine der beiden mit dem µC verbunden ist und der andere ist dann Hochohmig.
{kind=link}
Kann jmd noch mal drüber schauen?! Bzw. habe ich die Widerstände jetzt richtig? Würde gerne die Platine fertigen.. DAnke :)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.