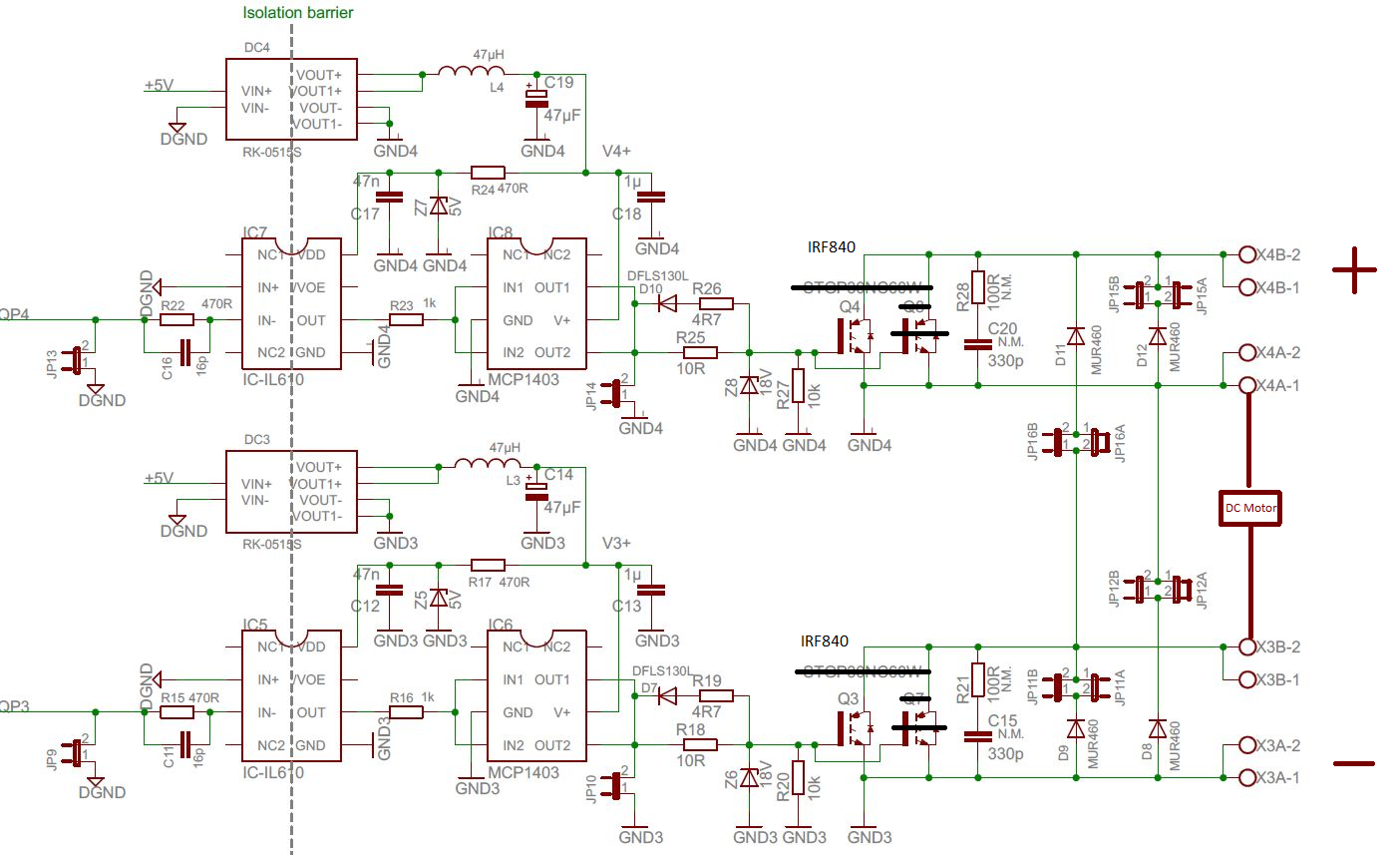
Hallo Euch! Mein erster Beitrag, ich möchte mich kurz vorstellen: Mein Name ist Dimitri,31 Jahre, Herkunft Nordhessen, Kfz-Meister, Mechatroniker, Equipment Oszi/Multimeter. Auch vorweg einen großen Dank an das Forum und die Mitglieder! Habe hier in den Jahren schon sehr viele Antworten gefunden! Da ich (auch begeistert) als Kfz´ler unvermeidbar in das Halbleiter Gebiet über-wandere, entstehen doch Fragen über die man reden (schreiben) möchte. Um Grundlagen zu lernen und verstehen, baue ich in meiner Freizeit folgendes: Auf dem angefügtem Schaltplan ist die mir vorliegende H-Bridge ((Hälfte) 1 CH 2 Treiber und Transistoren) mit welcher ich später von 12V/0,5A bis 250V/5A schalten möchte, zu sehen. (Geht dann später um verschieden große Motoren welche lediglich in Drehrichtung und Drehmoment geregelt werden sollen / drechseln, drehen. Drehzahl per mechanischer über/untersetzung oder evtl. per Spannung) Diese habe ich erfolgreich gelötet und in Betrieb genommen. (Das doppelte wie auf dem Plan / 4 Kanäle, galvanisch getrennt Spannungsversorgt und digital isoliert bis 1000V) Hätte gedacht das in dieser Schaltung die IRF840 NFet´s mit kleinem RDSon und diesem Treiber, egal wie, ohne Bootstrap, Ladungspumpe etc. an der HighSide auskommen, da der MCP1403 mit beiden Ausgängen 16V mit genügend Strom schaltet, so das ich die Schaltspannungen und Verbraucher willkürlich tauschen könnte. (Und dauerhaft auf ON schalten könnte.) Stimmt aber anscheinend nicht. Sobald ich eine Last zwischen zwei FET´s schalte funktioniert es nicht mehr. Aus etwas Vorsicht bin ich bis jetzt nicht über 12-14V hinaus, möchte nichts kaputt machen, An allen FET´s kann ich einzeln schalten was ich möchte (auch mit viel Last), die 16V am Gate liegen auch überall an. Ich wollte noch prüfen wenn ich nur einen FET nutze, ob ich dann an Drain und Source (Vor/Nach) jeweils den Verbraucher schalten kann. Sollte Aussage haben, oder verrenne ich mich? Die MUR 460`s in antiparallel geschaltet verstehe ich auch noch nicht so ganz... Rückschlag Induktive Last / EMF? Hab den Plan irgendwo aus dem Netz gesucht und nachgebaut. Brauche ich einen anderen Treiber ? Kann ich die MUR460`s weglassen? Haben die FETs doch intern den Freilauf... Oder am besten: bekomme ich das mit vorhandenem zum laufen ? Wenn Ihr Lust hättet mir zu helfen wäre klasse! Wie gesagt.. muss noch viel lernen ;) Grüße, Dimitri
Angehängte Dateien:
-

High_Side_NFET_Bridge.png
580 KB
:
Bearbeitet durch User
In deinem Plan scheint sich ein Fehler eingeschlichen zu haben. An der Stelle, wo dein Motor sitzt, müßte für eine echte Halbbrückenschaltung eine Verbindung sein. So kannst du nur diesen Motor in einer Richtung laufen lassen, wenn beide Kanäle angesteuert sind. D9 und D12 können entfallen, wenn die Mosfet-Dioden für deine Last ausreichend sind (also bei vielen gängigen Typen).
Das sind noch ein paar weitere Sachen nich ok. Für das Gate ist immer dr Sourcepin dr Bezugspunkt! Dimitri K. schrieb: > Hätte gedacht das in dieser Schaltung die IRF840 NFet´s mit kleinem > RDSon und diesem Treiber, egal wie, ohne Bootstrap, Ladungspumpe etc. an > der HighSide auskommen, Du hast da keine Highside, da Source bei allen IRF840 mit Masse verbunden ist. Folglich liegen immer beide Motorpole auf Masse. Wenn Du eine Highside mit N-Fets hast, brauchst Du zum Ansteuern immer eine Spannung die höher ist als die Spannung vom Source auf der Highside. Daher brauchst du irgendeine Spannungsquelle die hoch genug ist. Die Ladungspumpe / Bootstrap liefert das, aber nicht bei Dauer on. Sie entlädt sich langsam. Die muß pumpen um das auszuglichen. Wenn Du auf die Pumpe verzichtest, benötigst du eine alternative Spannungsquelle die für das Gate gegenüber dem Source hoch genug ist. Hast du diesen Artikel schon gelesen? http://www.mikrocontroller.net/articles/Treiber
:
Bearbeitet durch User
Grüße Dich (@besupreme), ah ich sehe, ich habe mich unglücklich formuliert. Das ist nur die hälfte meiner H Bridge. Sprich 2 von 4 Kanälen. (1 Signal). Wollte es überhaupt erst einmal mit einer Richtung zum laufen bekommen. Da liegt der Hund begraben. auch in eine Richtung bekomme ich den Motor nicht zum laufen wenn er so wie im Plan zwischen 2 FETs geschaltet wird. Nehme ich nur einen Kanal klappt es. (Dann jeweils eine Seite vom Motor an Versorgung + oder - . Habe auch eben probiert, kann den Motor vor oder nach ihm schalten, mit einem FET funktioniert es. Habe eben auch festgestellt das in dem Fall wenn der Motor zwischen 2 FETs geschaltet ist, Plus geschaltet wird aber Minus-seitig nicht, der gesamte Spannungsabfall liegt am FET minus - (lowside). Muss ich jetzt vielleicht schon eine höhere Schaltspannung als die Basisspannung nutzen? Irgend einen grundlegenden Fehler mache ich... Die Dioden löte ich erst einmal wieder ab. Die Frage die sich mir prinzipiell stellt ist, ob ich mit dieser Treiber / FET Kombination, ohne Bootstrap, Pumpe etc., höhere Spannungen als die basisspannung schalten könnte? (Highside und Lowside) Sofern sie irgend wann funktioniert wie gedacht / gehofft. Danke für deine Antwort!
:
Bearbeitet durch User
Hallo Kaffeetante, ich hätte vielleicht erwähnen sollen das bereits eine zweite Spannungsquelle angeschlossen ist. Plus (Vcc2+) an Drain des ersten Transistors, Source des ersten Transistors an Motoreingang, Motorausgang an Drain vom zweiten Transistor, Source vom zweiten Transistor an Masse(Vcc2-). Ich habe bezweifelt ob ich per Bootstrap irgendwann solch hohe Spannung auf die Source geben sollte bezüglich Schaden am Treiber ?? Anscheinend doch, dann liegt dort meine Fehlinterpretation. Hatte den Artikel schonamls gelesen, jedoch dachte ich da im Datenblatt des IRF 840 steht 20V für GateToSource wäre es mit dem Treiber getan, und auch Grenze. Dann doch die Auslegung von Bootstrap Kondensator und Diode in Angriff nehmen. Könntest Du mir evtl. dazu ein/zwei Ratschläge geben damit ich nichts zerstöre? Oder grad einen Kombination nennen die für meinen Zweck dient? Wäre super froh wenn mein Motörchen erst einmal in eine Richtung dreht ;) danke soweit!
Die Signale GND3 und GND4 sind vollständig voneinander getrennt? Im Prinzip ist es eine gute Idee, jedes Viertel der Vollbrücke einzeln aufzubauen und zu testen. Dafür lassen sich in deinem Aufbau die Jumper öffnen. Deinen Treiber-Vierteln müßte es vollkommen egal sein, ob sie zwischen (+) und Motor sitzen oder zwischen Motor und (-). Die werden ja erst später über die Klemmen verbunden, oder? Wenn meine Annahmen stimmen, müßte deine Schaltung eigentlich funktionieren, falls ich nix übersehn hab.
Ich bin mir nicht sicher welche Hälfte denn nun eingezeichnet ist und welche fehlt. Wie ich schon sagte, der Aufbau kann so wie im Plan nicht funktionieren. Der Source-Pin vom Leisungs-Fet IRF840 in der oberen Hälfte ist mit dem oberen Motorpin verbunden, aber beide sind auch mit gnd4 verbunden. Was soll gnd4 sein. Überarbeite den Plan. Es gibt nur einmal Masse/GND. Auf die beziehen sich auch die Steuersignale. Entweder gnd4 ist nur ein anderer Name für GND, dann hast du einen Kurzschluß, oder gnd4 hat ein anderes Potential als GND, dann hast du ein Problem mit dem Signalpegel des Steuersignals. Ich würde den Plan nicht korrigieren sondern systematisch erneut zeichnen, und deises mal komplett. Dann Lösen sich einige Fehler von selbst und bei den restlichen Fehlern müssen wir nicht raten, sondern können es besser sehen.
:
Bearbeitet durch User
Ok, ich merke gerade ich habe mich durch die Bezeichnung gnd4 verwirren lassen. Das hat absolut nichts mit Masse zu tun. Also müßte ich mich von vorn durch die Beiträge lesen. -.- Aber jetzt ist erst einmal einkaufen angesagt. Dimitri K. schrieb: > Diese habe ich erfolgreich gelötet und in Betrieb genommen. Dimitri K. schrieb: > Sobald ich eine Last zwischen zwei FET´s > schalte funktioniert es nicht mehr. Das paßt irgendwie nicht zusammen. Was war denn erfolgreich?
:
Bearbeitet durch User
Sollte der motor nicht zwischen beide halbbrücken angeschlossen werden? Du hast den motor zwischen high und lo side der einen halbrücke. Das is meines erachtens falsch. Schau mal im artikel bei der h brücke. Da liegt die last(motor) zwischen beiden halbbrücken. Die spannungsversorgung ist für die Jeweiligen halbrücken ist doch isoliert aufgebaut? Dann sollte das Doch ohne bootstrap gehen. Zumindest meine ich sowas gelesen zu haben. Ich habe bisher nur eine halbrücke mit motor gebaut. Also nagel mich Bei fehlern nicht fest ;)
Angehängte Dateien:
-

Bruecke_Ganz.PNG
180 KB
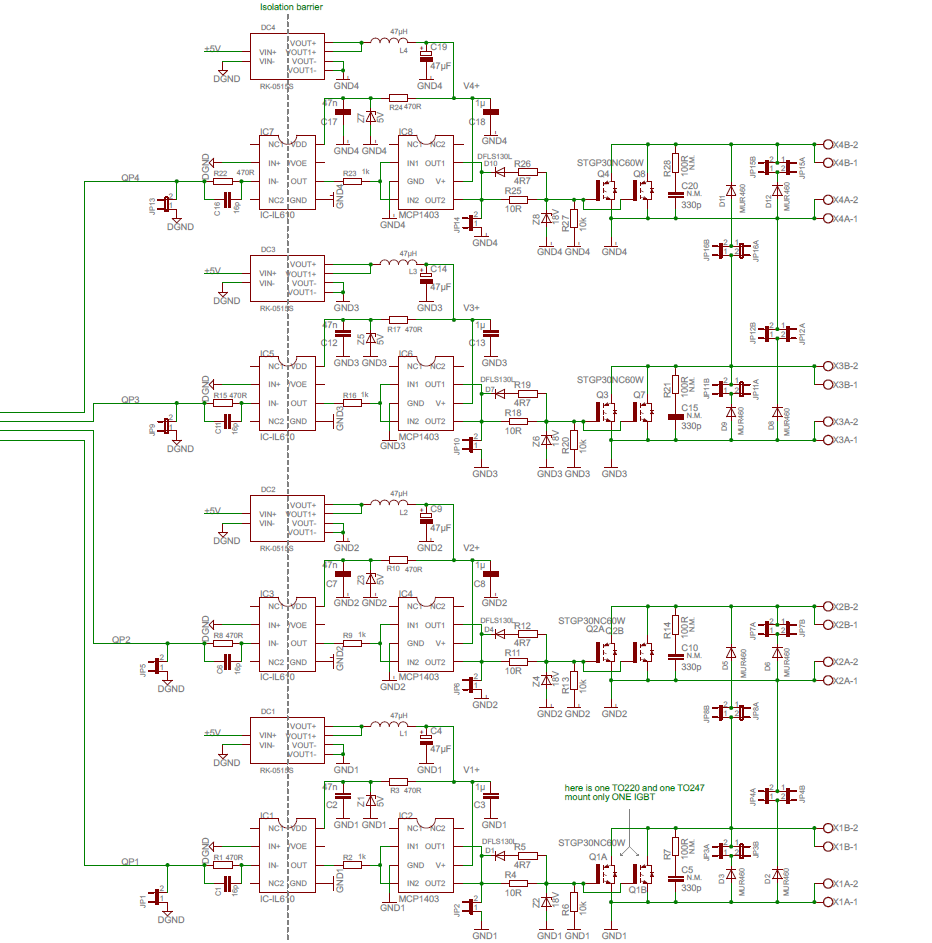
Danke erst einmal für die große Anteilnahme! Ich habe zur Sicherheit einmal den ganzen Schaltplan angefügt. QP1 + QP2 werden von einem Signal geschaltet. QP3 + QP4 werden von einem Signal geschaltet. momentan möchte ich überhaupt erst einmal eine "Hälfte" oder "Richtung" zum laufen bringen. @besupreme: Ja, ALLE Kanäle sind gegeneinander galvanisch in ihrer Spannungsversorgung getrennt.(siehe DC1-4) Helge A. schrieb: > > Die werden ja > erst später über die Klemmen verbunden, oder? Ja! @Kaffeetante: Genau, nicht von der Bezeichnung GND4 verwirren lassen, s.o oder s.u. Erfolg war bis hierher für mich das ganze Board überhaupt mit Digital Isolatoren, galvanisch getrennter Versorgung aufzubauen bis zumindest alle FETs einzeln schalten. Wie gesagt, bin nicht vom Fach und war ein (kleiner) Weg bis hier. Jörg Esser schrieb: > Sollte der motor nicht zwischen beide halbbrücken angeschlossen werden? > Du hast den motor zwischen high und lo side der einen halbrücke. Das is > meines erachtens falsch. Schau mal im artikel bei der h brücke. Da liegt > die last(motor) zwischen beiden halbbrücken. > Es ist wie gesagt nur eine Hälfte der Brücke, daher die Darstellungsweise. > Die spannungsversorgung ist für die > Jeweiligen halbrücken ist doch isoliert aufgebaut? Dann sollte das > Doch ohne bootstrap gehen. Zumindest meine ich sowas gelesen zu haben. > Das hoffte ich eigentlich auch. Nur nochmal zur Aufklärung: Jeder Kanal hat eine eigene Spannungsversorgung, jedoch schalten die FETs ein externes (separates) netzteil von 12-250V regelbar. Grüße, Dimitri
Den link kennste auch? http://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM#H-Br.C3.BCcke.2C_4- An welchen X is der motor angeschlossen?
Jörg Esser schrieb: > Den link kennste auch? > http://www.mikrocontroller.net/articles/Motoranste... > > An welchen X is der motor angeschlossen? Zwischen 4A und 3B. Qp3 und QP4 bekommen ein gemeinsames Signal = dauerhaft 5v (High). Wie gesagt möchte ich gern erst einmal eine Richtung dauerhaft schalten. Habe auch schon zwischen 100Hz und 1kHz probiert um auszuschließen dass der Treiber die Schaltgeschwindigkeit benötigt um ausreichend zu schalten. PWM sollte später folgen. Sollte jetzt erst einmal keine Rolle spielen. Oder welcher Denkanstoß entzieht sich mir? Unter der Abteilung 2 Quadrantensteller las ich bereits erneut Bootstrap Diode und Kondensator. Geht ja aber nicht 100% Einschaltdauer. Mit einem gegen Masse schalten mit einem zweiten Bremsen ist nicht das Ziel. Oder benötige ich doch einfach andere Treiber die mir die Gatesapannung anheben wenn ich zwischen zwei N-FETs dauerhaft schalten möchte, trotz der Trennung der Spannungsversorgungen ?
Wenn du das "Nicht-richtig-Schalten" feststellst, welche Gatespannung liegt dann an den beiden Mosfets an? Es muß ja einen Grund geben, daß da nit richtig durchgeschaltet wird.
Dimitri K. schrieb: >> An welchen X is der motor angeschlossen? > > Zwischen 4A und 3B. Qp3 und QP4 bekommen ein gemeinsames Signal = > dauerhaft 5v (High). Das klingt schonmal falsch. Wo ist das "separate Netzteil zur Versorgung des Motors" angeschlossen? Wenn du es zwischen 4B und 3A angeschlossen hast, dann schließt du mit der Halbbrücke bei deiner Ansteuerung einfach das Netzteil kurz. Wenn es woanders angeschlossen ist, dann kann kein Strom vom Netzteil durch den Motor fließen. Zeichne in deinem Schaltplan das Motornetzteil und den Motor mit ein, und überlege dir, über welche Transistoren der Strom vom Netzteil durch den Motor und wieder zurück fließen soll.
Achim S. schrieb: > Das klingt schonmal falsch. Wo ist das "separate Netzteil zur Versorgung > des Motors" angeschlossen? Wenn du es zwischen 4B und 3A angeschlossen > hast, dann schließt du mit der Halbbrücke bei deiner Ansteuerung einfach > das Netzteil kurz. Tschuldigung, das nehme ich zurück. Ich habe mich von den gejumperten Leitungen irritieren lassen. Trotzdem: zeichne in den Plan bitte mal ein, welche Jumper verbunden sind, wo der Motor und wo das Motornetzteil angeschlossen sind. Und wie auch schon von anderen gefragt wurde: welche Gate-Source Spannungen liegen bei dieser Ansteuerung an den FETs an?
Hallo Demitri, zu deiner Schaltung: Diesen Aufbau als vier unabhängige Elemente zu verwenden sollte gut fuktionieren. Wie schon von anderen gesagt, ist der Schaltplan mit den verschiedenen GNDs nur schwer lesbar, aber es geht. Die Gateansteuerung sieht soweit o.k. aus, lediglich die Jumper J10, J14, etc. sind mir ins Auge gesprungen; die gehören entweder direkt an das Gate, hinter die Widerstände oder besser ganz weg; sonst spielt dein Treiber evtl. "Armdrücken" mit dem DC-DC-Wandler. Aus den Einzelteilen eine Vollbrücke zu bauen ist keine gute Idee. In der ganzen Schaltung ist nicht ein einziger Zwischenkreiskondensator eingezeichnet, diese so einzubauen wie es nötig wäre, ist bei der Einteilung in Einzelteile auch kaum möglich. Die Zwischenkreiskapazität über Klemmen extern anzuschließen, davon rate ich ab. Hinzukommt, dass der Strompfad immer über min. einen Jumper laufen würde. Auch wenn du langsam schalten willst, sind es die Schaltflanken, die es erforderlich machen, dass du einen sauberen Zwischenkreis hast. Ich weiß, ich predige es immer wieder, dass ein sauber angeschlossener Zwischenkreis genauso wichtig ist, wie eine saubere Gateansteuerung. Gruß Leistungselektroniker P.S.: Schau dir die DC-DC-Wandler mal genauer an, viele von den Dingern sind für die Versorgung von (High-Side-)Treibern ungeeignet! Da ist die gute alte Bootstrap-Schaltung besser!
Angehängte Dateien:
-

TestEineRichtung.PNG
16 KB -

RechtsLinks.png
30 KB -

IMG_0221.jpg
720 KB
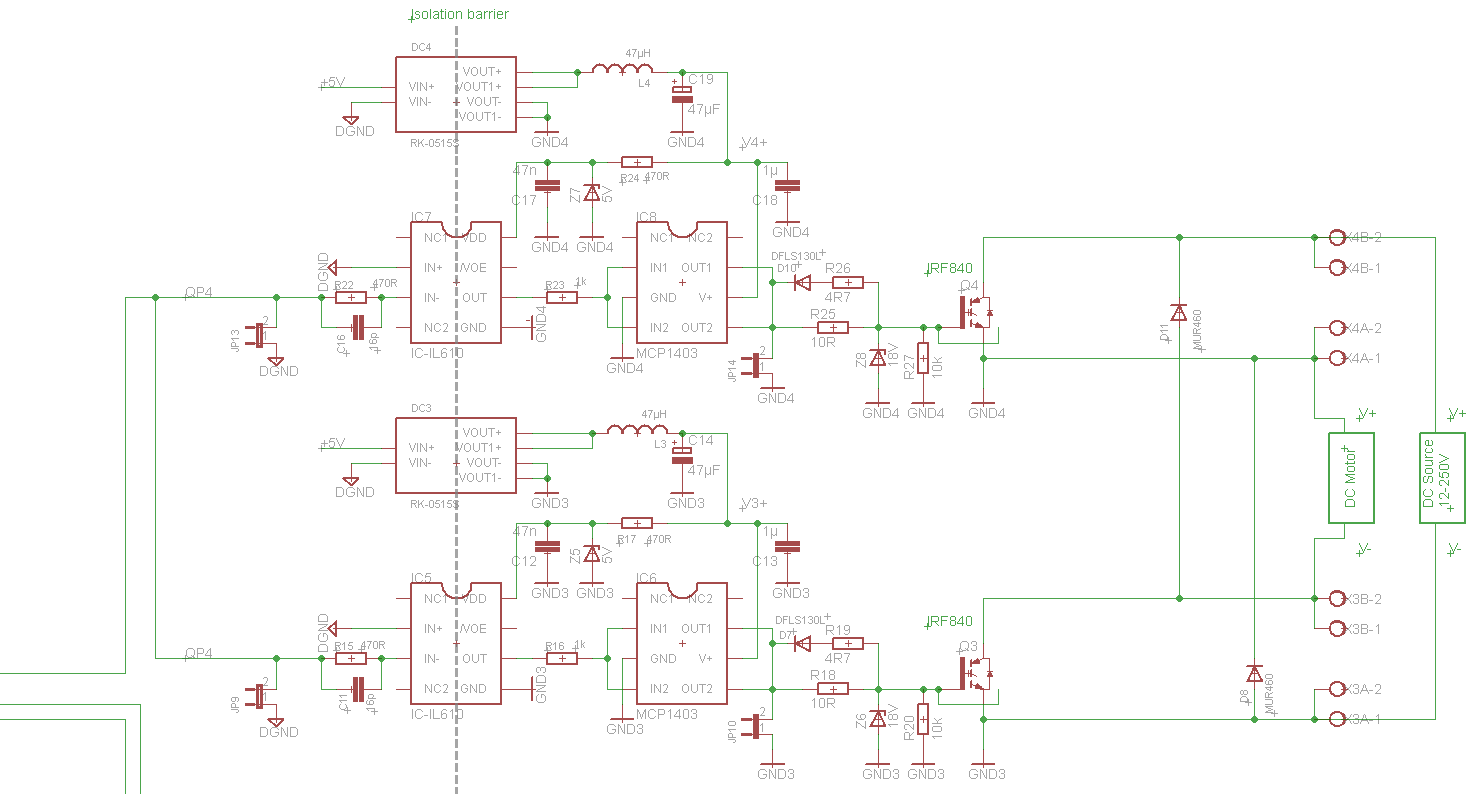
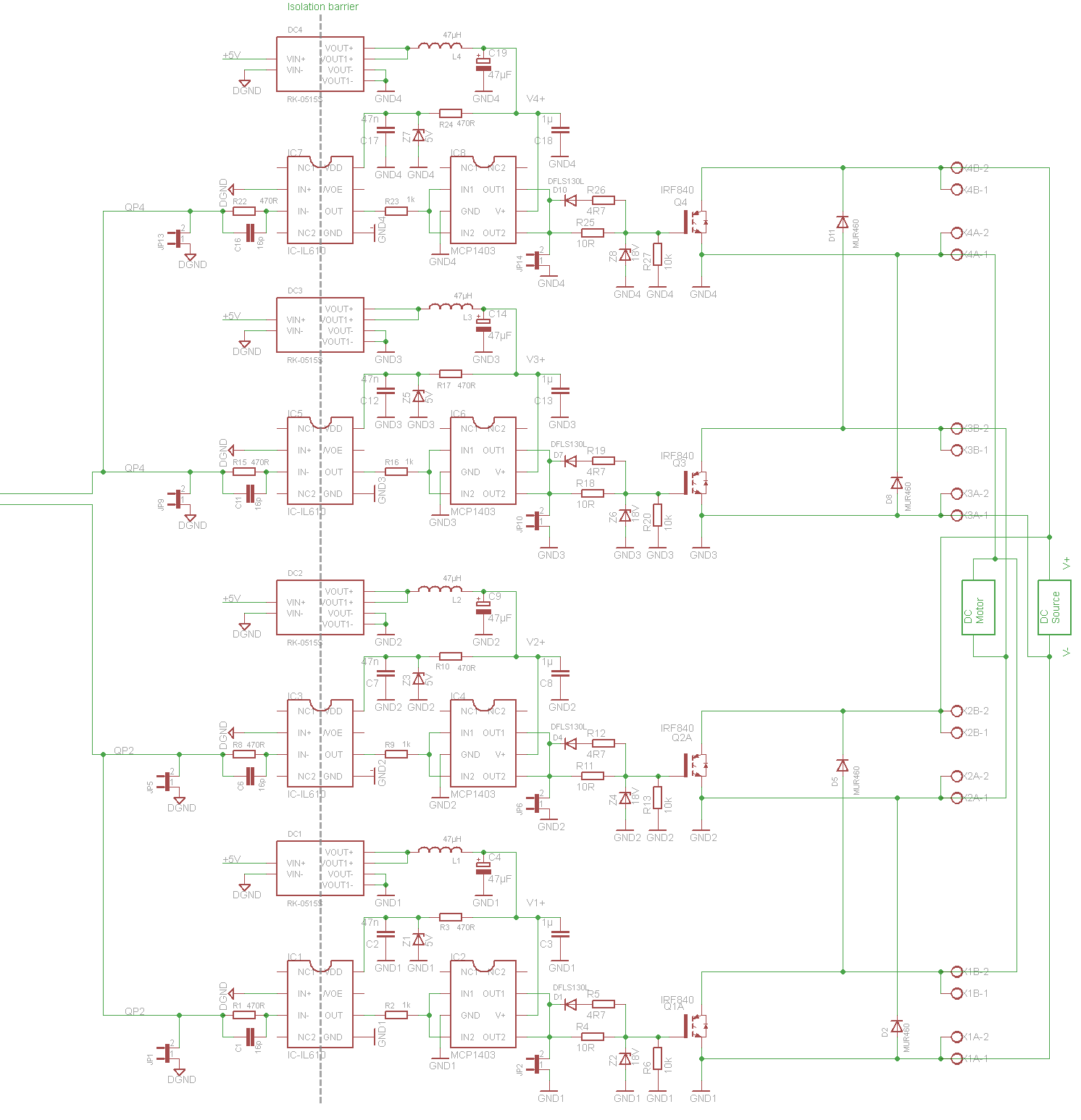
Hallo Leistungselektroniker! Leistungselektroniker schrieb: > Hallo Demitri, > > Die Gateansteuerung sieht soweit o.k. aus, lediglich die Jumper J10, > J14, etc. sind mir ins Auge gesprungen; die gehören entweder direkt an > das Gate, hinter die Widerstände oder besser ganz weg; sonst spielt dein > Treiber evtl. "Armdrücken" mit dem DC-DC-Wandler. Diese sind nicht mit aufgebaut. > Die Zwischenkreiskapazität über Klemmen extern anzuschließen, davon rate > ich ab. Dies wollte ich bewerkstelligen in dem ich entsprechende Kapazitäten an X4A/X3B und X2A/X1B bereitstelle. Also keine gute Idee... > Hinzukommt, dass der Strompfad immer über min. einen Jumper > laufen würde. Die Jumper sind auch nicht mit aufgebaut, die Dioden sind direkt auf der Leiterbahn mit entsprechend Zinn an den FETs und Anschlüssen verbunden. > Auch wenn du langsam schalten willst, sind es die Schaltflanken, die es > erforderlich machen, dass du einen sauberen Zwischenkreis hast. Danke das hilft weiter! So etwas hatte ich schon geahnt (auch gelesen), dachte mit entsprechender Frequenz (~1kHz) könnte ich das bei dem kleinen 12V DC Motor vernachlässigen. > Ich weiß, ich predige es immer wieder, dass ein sauber angeschlossener > Zwischenkreis genauso wichtig ist, wie eine saubere Gateansteuerung. Werde es mir merken! > P.S.: Schau dir die DC-DC-Wandler mal genauer an, viele von den Dingern > sind für die Versorgung von (High-Side-)Treibern ungeeignet! Da ist die > gute alte Bootstrap-Schaltung besser! 134mA bei 15V für den MCP1403, sollte eigentlich reichen?? (am2d-0515sz) Wie würde die Bootstrap Schaltung aussehen? Mir fällt grade auf das am 5V Festspannungsregler, an dem die 4 DC/DC Wandler angeschlossen sind, schon 450mA bei NUR angesteckter Brücke OHNE Ansteuerung verbraucht werden. Werde mir gleich die Gate-Source Spannungen beim schalten unter Last anschauen und berichten. > Achim S. schrieb: > Trotzdem: zeichne in den Plan bitte mal ein, welche Jumper verbunden > sind, wo der Motor und wo das Motornetzteil angeschlossen sind. Und wie > auch schon von anderen gefragt wurde: welche Gate-Source Spannungen > liegen bei dieser Ansteuerung an den FETs an? Hänge noch 2 Pläne an. Einmal den Testlauf in nur eine Richtung, wenn überhaupt möglich permanent zu schalten. Anscheinend nicht. Und die ganze Brücke wie sie komplett sein soll. (Kondensatoren für Zwischenkreis nicht eingezeichnet! Grüße, Dimitri
Dimitri K. schrieb: > 134mA bei 15V für den MCP1403, sollte eigentlich reichen?? (am2d-0515sz) Google erzählt mir etwas von 66 mA für den RK-0515S. Außerdem ist der Maximalstrom nicht das Einzige. Das ist ein Regler! Als Treiber pendelt er immer zwischen Maximum und Leerlauf ohne Grundlast. Der Regler muß diesen schnellen Lastwechseln auch einigermaßen folgen können. Das geht nicht mit allen Reglern. Manchmal hilft ein Lastwiderstand als Grundlast parallel zum Ausgangskondensator. Zum Ausangselko würde ich noch einen Kerko parallel schalten, weil er schneller ist. 1 kHz ist zwar noch nicht wirklich hoch. Also ist die mittlere Leistung auch noch gering. Aber das Schalten soll ja schnell erfolgen. Dimitri K. schrieb: > Wie würde die Bootstrap Schaltung aussehen? Viele Treiber haben das schon integriert und benötigen nur einen Kondensator und eine schnelle Diode. Beispielsweise IR 21844S ud IR 2814S. Ich sage ncht daß das die Besten für diesen Zweck sind. Es sind die ersten Beispiele die mir in die Hände gefallen sind. Damit wäre aber kein Dauer-ON möglich. Es muß regelmäßig ein kleines OFF kommen damit Ladung nachgepumpt werden kann.
:
Bearbeitet durch User
Dimitri K. schrieb: > Hänge noch 2 Pläne an. Einmal den Testlauf in nur eine Richtung, > wenn überhaupt möglich permanent zu schalten. Anscheinend nicht. danke. Die jetzt noch eingezeichneten Jumper (JP9, JP10, JP13, JP14) sind offen, oder? Dann sehe ich jetzt keinen Grund, warum die Testschaltung nicht funktioniert. Da hilft wohl nur Messen. Könntest du mit einem Multimeter nachschauen, welche Spannungen (alle bezogen auf GND3) an folgenden Knoten liegen: Gate Q3, Gate Q4, Source Q4, Drain Q4, Drain Q3
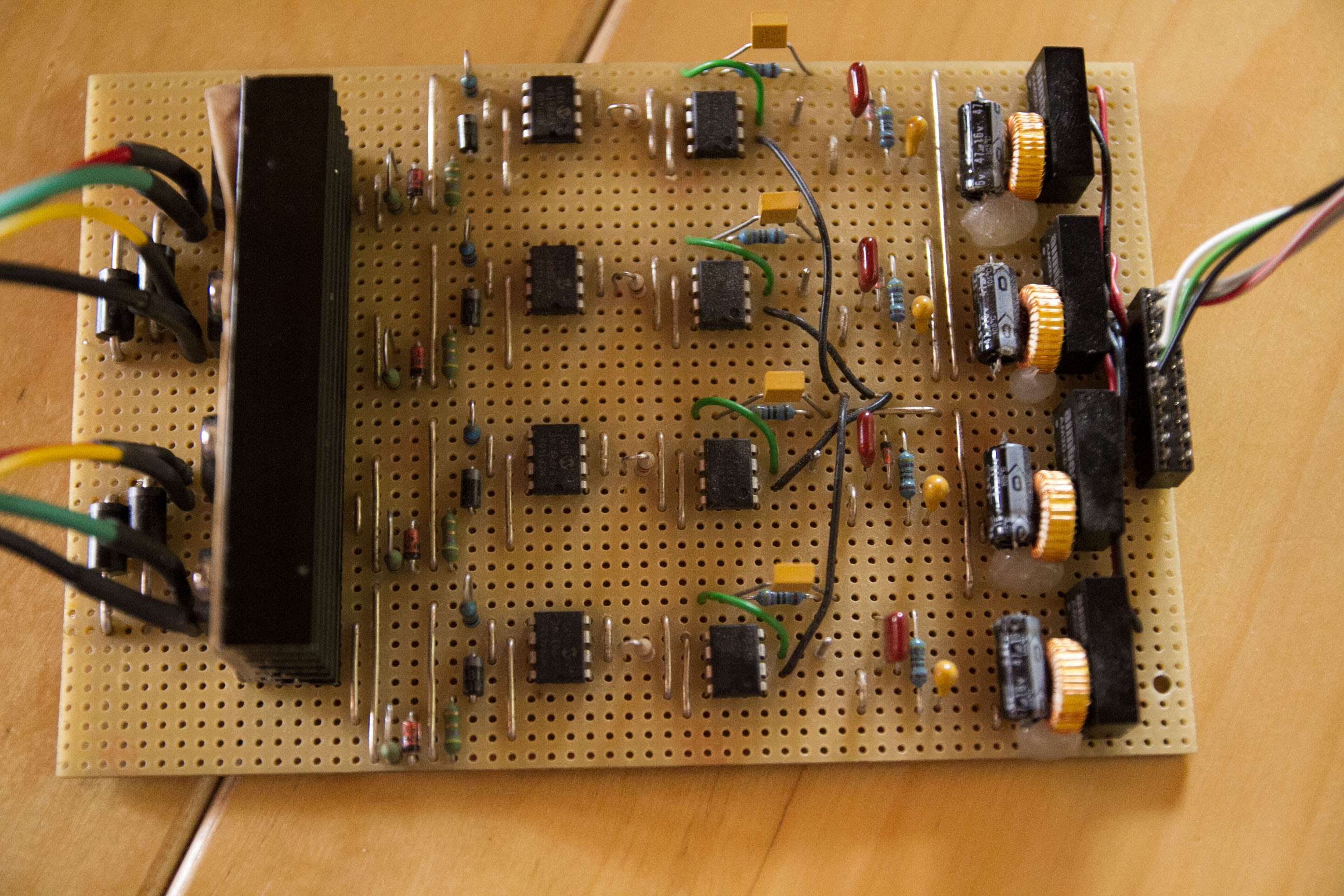
...und weil man es auf dem Foto nicht so genau sieht: die Schrauben, mit denen die IRF840 auf den Kühlkörper geschraubt sind, haben alle eine Isolierbuchse, oder?
Ups, habe noch gar nicht auf das Foto gschaut. Das sieht zwar schön aus hat aber ein paar deutliche Layoutschwächen. Die Kondensatoren sind viel zu weit vom Treiber enfernt. Die brauchen Kondensatoren so nahe wie möglich an den Versorgungspins. Die Treiber sind sehr weit von den Fets entfernt. Der Treiber muß immer nahe an den Source-Pin. Bei deinem aktuellen Layout fließt der Gate-Strom quer über die gesamte Platine! Die Ladeimpulse müssen über Kondensatoren in Zielnähe lokal begrenzt werden. Die Werte stehen im Datenblatt. Anstelle des Kerkos kannst Du auch einen Folienkondensator mir 100 nF über das IC-Gehäuse direkt an die Pins löten. Du willst zuerst zwar nur eine Halbbrücke testen, aber du hast eine Vollbrücke. Zwei Fets haben den gleichen Sourcebezug und zwei Fets haben die gleiche Versorgungsspannung am Drain. Bei den Motoranschlüssen sind auch je 2 Fets angeschlossen. Dadurch ergibt sich GND1 = GND3 etc.. Nur so bekommst Du einen Überblick welche Spannung(sdifferenzen) wo anliegen.
Achim S. schrieb: > ...und weil man es auf dem Foto nicht so genau sieht: die Schrauben, mit > denen die IRF840 auf den Kühlkörper geschraubt sind, haben alle eine > Isolierbuchse, oder? Achim, was soll ich sagen... Kann man das Anfängerfehler nennen ??? Ja, es waren trotz Pad als Isolierung und Kunststoffunterlegscheiben die FETs untereinander verbunden ... (Schrauben seitwärts am Gewinde angelegen) Achim S. schrieb: > danke. Die jetzt noch eingezeichneten Jumper (JP9, JP10, JP13, JP14) > sind offen, oder? Jepp. > Da hilft wohl nur Messen. Könntest du mit einem Multimeter nachschauen, > welche Spannungen (alle bezogen auf GND3) an folgenden Knoten liegen: > Gate Q3, Gate Q4, Source Q4, Drain Q4, Drain Q3 Habe nun beide Halbbrücken jeweils mit einer LED als Verbraucher getestet, funktioniert einwandfrei. Die 16V an den jeweiligen Gates liegen überall beim schalten stabil an. Mit dem kleinen 12V Motor hängt es jedoch noch ein wenig, muss jetzt jedoch erst einmal das größere Netzteil anschließen und etwas Ordnung machen. Berichte dann umgehend ob es mit mehr Last ebenso funktioniert! Messwerte werde ich dann noch beifügen, vielleicht kann man noch etwas daraus gemeinsam schlussfolgern. Carsten R. schrieb: > Die Kondensatoren sind viel zu weit vom Treiber enfernt. Die brauchen > Kondensatoren so nahe wie möglich an den Versorgungspins. Die Treiber > sind sehr weit von den Fets entfernt. Der Treiber muß immer nahe an den > Source-Pin. Bei deinem aktuellen Layout fließt der Gate-Strom quer über > die gesamte Platine! Die Ladeimpulse müssen über Kondensatoren in > Zielnähe lokal begrenzt werden. Die Werte stehen im Datenblatt. Anstelle > des Kerkos kannst Du auch einen Folienkondensator mir 100 nF über das > IC-Gehäuse direkt an die Pins löten. Danke! Werde das soweit wie möglich umsetzen! > > Du willst zuerst zwar nur eine Halbbrücke testen, aber du hast eine > Vollbrücke. Zwei Fets haben den gleichen Sourcebezug und zwei Fets haben > die gleiche Versorgungsspannung am Drain. Bei den Motoranschlüssen sind > auch je 2 Fets angeschlossen. Dadurch ergibt sich GND1 = GND3 etc.. Nur > so bekommst Du einen Überblick welche Spannung(sdifferenzen) wo > anliegen. Soweit richtig und verstanden! Hatte jedoch beim Testlauf auch nur eine Seite beschaltet (1x Plus und 1x Minus für 2 FETs, dazwischen den Motor). Carsten R. schrieb: > Dimitri K. schrieb: >> 134mA bei 15V für den MCP1403, sollte eigentlich reichen?? (am2d-0515sz) > > Google erzählt mir etwas von 66 mA für den RK-0515S. RK-0515s sind die momentan verbauten (mit134mA max.) > Außerdem ist der > Maximalstrom nicht das Einzige. Das ist ein Regler! Als Treiber pendelt > er immer zwischen Maximum und Leerlauf ohne Grundlast. Der Regler muß > diesen schnellen Lastwechseln auch einigermaßen folgen können. Das geht > nicht mit allen Reglern. Manchmal hilft ein Lastwiderstand als Grundlast > parallel zum Ausgangskondensator. Zum Ausangselko würde ich noch einen > Kerko parallel schalten, weil er schneller ist. 1 kHz ist zwar noch > nicht wirklich hoch. Also ist die mittlere Leistung auch noch gering. > Aber das Schalten soll ja schnell erfolgen. Das werde ich ausprobieren, gut zu wissen. > Viele Treiber haben das schon integriert und benötigen nur einen > Kondensator und eine schnelle Diode. Beispielsweise IR 21844S ud IR > 2814S. Ich sage ncht daß das die Besten für diesen Zweck sind. Es sind > die ersten Beispiele die mir in die Hände gefallen sind. > Gut das ist schon mal eine Orientierung für mich. > Damit wäre aber kein Dauer-ON möglich. Es muß regelmäßig ein kleines OFF > kommen damit Ladung nachgepumpt werden kann. Genau so habe ich es verstanden. Bis später und vielen Dank bis hierher an euch alle! Wie gesagt es gibt noch einiges zu lernen, dies ist wieder enorm aufschlussreich für mich! Gruß Dimitri
Achim S. schrieb: > ...und weil man es auf dem Foto nicht so genau sieht: die Schrauben, mit > denen die IRF840 auf den Kühlkörper geschraubt sind, haben alle eine > Isolierbuchse, oder? Echt klasse! Gut durchschaut ;) Danke nochmals Achim!
Wenn du nur eine seite testest musst du deinen motor bitte auch wie im link schaltplan 2Q quadrantensteller anschliessen. Sonst produziert dein motor hohe leerlaufspannungen die dann probleme machen. Also entweder die ganze brücke testen oder nur eine hälfte aber dann den motor entsprechend anders anklemmen. Sonst läuft der motor auch nicht richtig rund. Dafür schliesst Der eine fet ja den motor kurz wenn du nach 2Q verschaltest. Das ersetzt dann die schlechte kurzschlussdiode wegen der EMK. Zumindest ist das bei meinem 2Q so. Und ob deine Schaltung wirklich diese Lastbereiche schafft steht auf dem nächsten Blatt. Ich bin gerade mal bei 24V und mein layout Kann ich schon neu machen ;) Weiterhin viel erfolg.
Jörg Esser schrieb: > Wenn du nur eine seite testest musst du deinen motor bitte auch wie im > link schaltplan 2Q quadrantensteller anschliessen. Sonst produziert dein > motor hohe leerlaufspannungen die dann probleme machen. Also entweder > die ganze brücke testen oder nur eine hälfte aber dann den motor > entsprechend anders anklemmen. > Sonst läuft der motor auch nicht richtig rund. Dafür schliesst > Der eine fet ja den motor kurz wenn du nach 2Q verschaltest. Das ersetzt > dann die schlechte kurzschlussdiode wegen der EMK. Das ist klar. Genau so habe ich ihn auch beim jetzigen Test angeschlossen. Funktioniert so schon recht gut. > Zumindest ist das bei meinem 2Q so. > Und ob deine Schaltung wirklich diese Lastbereiche schafft steht auf dem > nächsten Blatt. Ich bin gerade mal bei 24V und mein Layout > Kann ich schon neu machen ;) Ich werde mich langsam herantasten. Wie gesagt stehen mehrere Motoren zur Verfügung, bin da ganz behutsam. Was musst Du denn umgestalten? Magst Du mir ein paar Erfahrungen berichten? > > Weiterhin viel Erfolg. Danke Dir, wünsche ich ebenso!
Probleme sind PWM Frequenz. Gelesen habe ich bei grösserem Motor runter gehen. Ich teste 300Hz bei einem 9kW Motor. Hohe frequenzen sind schlecht für den bürstenabbrand. Ausserdem hat der ja entsprechend Schwungmasse. Schaltflanken besonders steil bedeutet hohe spannungsspitzen die mit kurzen leitungen etc. In grenzen gehalten werden sollen. Mit gatewiderständen und dioden spielen um die abschaltzeit zu verlangsamen.da ich nur mit max 48V Arbeiten will brauch ich dicke leitungen 70qmm. Jeder cm produziert dann halt spannungen :( Die ansteuerung bei lastwechseln kommt dann als nächstes. Strommessung versuche ich zzt über shunt und op um bei überstrom per Avr abzuschalten. Das könnte schon zu langsam sein. Angeblich soll ne überstromschaltung besser sein...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.