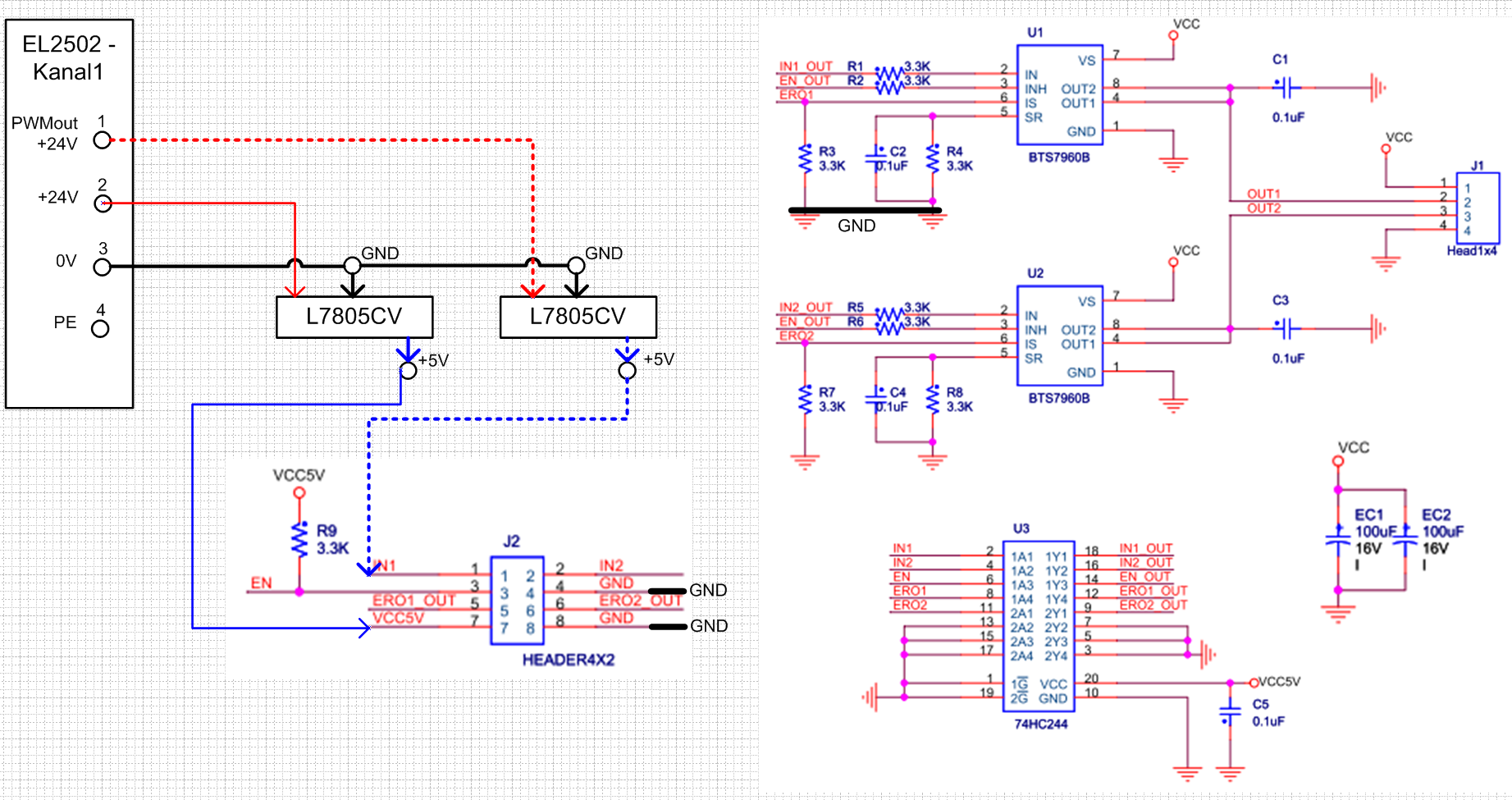
Hallo Leute, ich habe mir bei eBay einen DC Motortreiber mit zwei BTS7960B gekauft (http://www.ebay.de/itm/NEW-Max-43A-BTS7960B-DC-Motor-Driver-Drive-Module-H-Bridge-PWM-Control-/111113224376). Ich wollte mit diesem einen DC-Motor 24V 500W mittels PWM betreiben. Die PWM generiert mir eine Beckhoff EtherCAT Klemme EL2502 (http://infosys.beckhoff.de/index.php?content=../content/1031/el2502/html/bt_el2502_connection.htm&id=7284). Da diese EL2502 nur 24V liefert, musste ich mittels zweier L7805CV sowohl die 24V Treiberlogikversorgung, als auch das PWM Signal auf 5V bringen. (Meine rudimentäre Schaltung hänge ich an.) Der Aufbau: Ein 24V Netzteil versorgt die EtherCAT Klemmen und den Motor. Über die Spannungswandler sind die Pins 5V, GND und IN1 verdrahtet, wobei das PWM Signal an IN1 geht - der EN Pin war offen. 1. Problem Der Motor drehte beim Einschalten sofort los - lag also 0V am IN1 an, hieß das Vollgas - warum ?? (Gegenprobe stimmte auch: lagen 5V an => Stillstand) 2. Problem Nach zwei oder drei Tests, ging gar nichts mehr und das Netzteil schaltete ab. Grund: Vcc/GND der Motorversorgung haben nun einen ohmschen Druchgang - so ca. 0 Ohm. - Warum ?? Kann mir einer von euch da eine Erklärung geben? Schaltungstechnisch bin ich ein Anfänger, also finde ich den groben Schnitzer selber nicht. Danke schon mal im Voraus!
Angehängte Dateien:
-

DcMotortreiber24V.png
310 KB
Thomas Z. schrieb: > Da diese EL2502 nur 24V liefert, musste ich mittels zweier L7805CV > sowohl die 24V Treiberlogikversorgung, als auch das PWM Signal auf 5V > bringen. (Meine rudimentäre Schaltung hänge ich an.) Das PWM-Signal mit einem 7805? Dafür ist der 7805 nicht gebaut!! Da hättest du besser mal einen ordinären Spannungsteiler verwendet. Und den schön niederohmig, weil die PWM-Klemme nur High-Side treiben kann. Für ein anständiges Low bist du also sleber verantwortlich... Welche Frequenz hat das PWM-Signal? > - der EN Pin war offen. Auch interessant: wie ist der Motor angeschlossen und wie der IN2?
> der EN Pin war offen Er hat einen Pull-Up Widerstand. Also sind die ICs aktiv. > Der Motor drehte beim Einschalten sofort los - lag also 0V am IN1 an, > hieß das Vollgas - warum ?? (Gegenprobe stimmte auch: lagen 5V an => > Stillstand) Weil IN2 vermutlich auch auf 5V liegt (warum ist aus dem Plan nicht ersichtlich). > Nach zwei oder drei Tests, ging gar nichts mehr und das Netzteil > schaltete ab. Grund: Vcc/GND der Motorversorgung haben nun einen > ohmschen Druchgang - so ca. 0 Ohm. - Warum ?? Gute Frage. Ich hoffe mal, dass die 100µF Kondensatoren mehr als 16V haben und das nur ein Fehler im Plan ist. Ansonsten würde ich erstmal das PWM Signal über einen Spannungsteiler auf die 5V bringen. Der 7805 ist dafür ungeeignet. Dann Frage ich mich was die Schaltung überhaupt machen soll. Die Geschwindigkeit und die Richtung des Motors steuern? Das wird so nicht gehen. Wenn die PWM am IN Eingang liegt, schaltest du den Motor permanent von Vollgas auf Vollbremsung um. Mit dem IN Eingang kannst du nur die Richtung steuern! Wenn dann muss die PWM an den INH Eingang.
Kevin S. schrieb: > Wenn die PWM am IN Eingang liegt, schaltest du > den Motor permanent von Vollgas auf Vollbremsung um. Das ist ja auch der Trick dabei. Mit 1Hz PWM-Frequenz hört sich das nicht schön an und ruckelt ungemein. Aber mit 20kHz werden in einem Zyklus weder volle Drehzahl noch Stillstand erreicht: die Drehzahl des Motors folgt dem Tastverhältnis der PWM. Auch bei Belastung sinkt die Drehzahl nicht wesentlich. Taktet man INH, dreht der Motor ohne Last schon bei kleinem Tastverhältnis sehr hoch; er läuft ja ungebremst! Bei Belastung bricht die Drehzahl ein. Wer will denn so etwas?
Ich muss zugeben, ich habe noch nie gehört, dass man das so macht. Wenn ich eine konstante und lastunabhängige Drehzahl brauche, muss ich eben die Drehzahl messen und regeln. Das es irgendwie funktioniert kann ich mir ja vielleicht auch noch vorstellen, nur wie effizient ist das ganze und was für Ströme entstehen, wenn ich einen Motor der 20A zieht alle 50µs "kurzschließe"? Oder stehe ich total aufm Schlauch...?
Ein DC-Motor hat eine Induktivität, die durch ihren Stromanstieg verhindert, dass während der EIN-Phase der Treiber kurzgeschlossen wird. In der AUS-Phase kann der Motor ebenfalls seinen Generatorstom nicht in 50µs aufbauen. Daher kann die Drehzahlsteuerung mit hoher PWM-Frequenz ohne nennenswerte Verluste funktionieren; es gibt keinen Kurzschluß. Um auf Deinen Vergleich mit Vollgas und Vollbremsung zu kommen: Nimm (in Gedanken) eine Schaltung, die die PWM-Ansteuerung über INH macht und stelle Dir eine Einschaltzeit von 0,2s und eine Pausenzeit von 0,8s vor. Innerhalb der 0,2s wird der Motor auf max. Drehzahl beschleunigen, um in der 0,8s Pause nur unwesentlich die Drehzahl zu verringern. Dass so gerne der INH-Anschluß für PWM verwendet wird, liegt an der Einfachheit der Schaltung. Man braucht nur einen PWM-Ausgang und die (statischen) IN1/IN2-Eingänge legen die Richtung fest. Alles zwar schön einfach, aber nicht besonders gut. Wenn Du Gelegenheit dazu hast, probiere die Schaltung mit PWM an INx aus. Verändere das Tastverhältnis, belaste den Motor und beobachte die Drehzahl. Ich glaube, das wird Dich überzeugen :-)
Kevin S. schrieb: > nur wie effizient ist das ganze und was für Ströme entstehen, wenn ich > einen Motor der 20A zieht alle 50µs "kurzschließe"? Ein Motor, der 20A zieht, wird maximal genau diesen Strom, den er gerade eben gezogen hat, weiterfließen lassen (können). Denn im tiefsten Inneren ist ein Motor auch nur eine Induktivität... > ich einen Motor der 20A zieht alle 50µs "kurzschließe"? Idealerweise schließt man ihn nicht nur kurz, sondern polt ihn komplett um. Denn beim Kurzschluss verlässt man sich darauf, dass die Generatorwirkung des Motors ausreichend hoch ist. Beim Umpolen wird dagegen ein definierter Gegenstrom aufgebracht. Im Grenzfall (PWM = 50/50) fließt kein Strom und der Motor steht...
Danke für die Erklärung. Ich war mir nicht sicher, dass die Induktivität des Motors ausreicht, um den Strom während der Auszeit aufrecht zu halten. Wenn man den Stromverlauf am Ausgang der H-Brücke betrachtet, würde man bei zu kleiner Frequenz oder Induktivität der Wicklung einen sich umkehrenden Strom sehen? Heißt das konkret, dass wenn die Induktivität und der Widerstand der Wicklung bekannt sind, man tau ausrechnen und damit abschätzen kann, ob die PWM Frequenz zum Motor passt oder höher gewählt werden muss? m.n. schrieb: > Um auf Deinen Vergleich mit Vollgas und Vollbremsung zu kommen: > Nimm (in Gedanken) eine Schaltung, die die PWM-Ansteuerung über INH > macht und stelle Dir eine Einschaltzeit von 0,2s und eine Pausenzeit von > 0,8s vor. Innerhalb der 0,2s wird der Motor auf max. Drehzahl > beschleunigen, um in der 0,8s Pause nur unwesentlich die Drehzahl zu > verringern. Das was du hier beschreibst, ist ja nur das Trägheitsmoment des Rotors. Je nach Umständen kann der Motor in den 0,8s auch anhalten. Das ist nur Abhäng von der Masse und der zuvor erreichten Drehzahl des Rotors. Wenn ich in diesem Beispiel die PWM an IN anschließe, wird der Motor beschleunigen und relativ schnell anhalten. Von daher verstehe ich nicht so ganz was du damit sagen willst. Das die Induktivität bei einer so niedrigen Frequenz keine merklichen Auswirkungen hat ist logisch. edit: Ich habe grade noch den Post von Lothar gesehen: > Ein Motor, der 20A zieht, wird maximal genau diesen Strom, den er gerade > eben gezogen hat, weiterfließen lassen (können). Das ist klar, nur wie lange kann er das? Weil in dem Moment in dem der Strom 0 ist, arbeitet der Motor als Generator. Das heißt aber auch das er bremst und als Last nur sein Wicklungswiderstand + Widerstand der Transistoren hat. > Idealerweise schließt man ihn nicht nur kurz, sondern polt ihn komplett > um. Wenn ich ihn anhalten will schon. Meine Aussage mit dem Kurzschließen war nur auf die Schaltung oben bezogen. Den dort werden entweder beide High- oder Low Side Schalter aktiv wenn die PWM an dem IN Eingang ist.
Hallo Kevin, > Ich muss zugeben, ich habe noch nie gehört, dass man das so macht. Wenn > ich eine konstante und lastunabhängige Drehzahl brauche, muss ich eben > die Drehzahl messen und regeln. Dann würde man die Drehzahl regeln. In vielen Fällen reicht es aber aus, die Drehzahl zu steuern, in dem man das Drehmoment (bzw. den Strom) regelt. > Das es irgendwie funktioniert kann ich > mir ja vielleicht auch noch vorstellen, nur wie effizient ist das ganze > und was für Ströme entstehen, wenn ich einen Motor der 20A zieht alle > 50µs "kurzschließe"? Wenn die Zeitkonstante der Motorwicklung hoch genug ist, stellt sich ein Mittelwert mit einem gewissen Ripple ein. Vielleicht ist die Regelung von Temperaturen anschaulicher. Stell Dir vor, du drehst im Winter im Wohnzimmer die Heizung im 5 Minuten Takt voll auf und wieder voll ab. Die Raumtemperatur wird nicht alle 5 Minuten von 0°C nach 40°C springen. Ein anderes Beispiel wäre dein Kühlschrank. Entweder der Kompressor läuft oder er läuft nicht... Mit freundlichen Grüßen Thorsten Ostermann
Kevin S. schrieb: > Das was du hier beschreibst, ist ja nur das Trägheitsmoment des Rotors. Laß das 'nur' mal weg. Die Trägheit auf jeden Fall zur Folge, dass der Motor gemittelt viel zu schnell läuft! > Je nach Umständen kann der Motor in den 0,8s auch anhalten. Ein guter Motor zeichnet sich dadurch aus, dass er möglichst lange (ohne Reibungsverluste) ausläuft. Thorsten Ostermann schrieb: > Vielleicht ist die Regelung von Temperaturen anschaulicher. Stell Dir > vor, du drehst im Winter im Wohnzimmer die Heizung im 5 Minuten Takt > voll auf und wieder voll ab. Diese Beispiele sind leider nicht immer so überzeugend, da ein Motor eben auch noch ein Generator ist. Anlehnend an die Heizung, müßte man abwechselnd heißes und dann wieder gezielt eiskaltes Wasser durch den Heizkörper schicken. Na ja, vielleicht helfen die Erklärungen ja doch.
Hallo Thorsten, ich habe das Gefühl du versuchst mir zu erklären was PWM ist. Das ist mir bekannt ;-). In diesem Fall ist es doch so, dass während der Aus-Zeit der Ausgang kurzgeschlossen wird. Das soll den Effekt haben, dass der Motor eine fast konstante Drehzahl bei schwankender Last hat. Warum das so ist verdeutlichen deine Beispiele leider nicht. Das kann meiner Meinung nach auch kein Beispiel, da es eben nur bei einem Motor und entsprechend hoher Frequenz funktioniert. Der Heizung ist es nämlich egal was man mit ihr während der Aus-Zeit macht. Mehr als aus geht halt nicht. Dem Motor ist es nicht egal, zumindest solange er sich noch dreht. m.n. schrieb: > Laß das 'nur' mal weg. Die Trägheit auf jeden Fall zur Folge, dass der > Motor gemittelt viel zu schnell läuft! Das bestreite ich auch nicht. Natürlich läuft ein ungeregelter Motor ohne Last schneller als einer Mit. Nur mir war bisher das Vorgehen unbekannt, dass der Ausgang während der Aus-Zeit kurzgeschlossen wird. Hast du evtl. irgendwelche Datenblätter, Appnotes, Links oder Bücher in denen es dazu irgendwelche Infos gibt? Ich konnte dazu leider noch nichts finden.
Hallo Kevin, > ich habe das Gefühl du versuchst mir zu erklären was PWM ist. Das ist > mir bekannt ;-). Ach so. Ich dachte tatsächlich, dass wäre das Problem ;) > In diesem Fall ist es doch so, dass während der > Aus-Zeit der Ausgang kurzgeschlossen wird. Das soll den Effekt haben, > dass der Motor eine fast konstante Drehzahl bei schwankender Last hat. Wo steht das? Die PWM wird benutzt um den Strom vorzugeben, von schwankender Last war nicht die Rede!? Der OP macht ja nichteinmal eine Stromregelung, sondern stellt nur die PWM. Viel mehr als ein "Sanftanlauf" kann dabei nicht rauskommen. Das hätte man aber sicherlich auch einfacher lösen können als eine SPS mit dem Erzeugen der PWM zu beschäftigen. Leider äußert sich der OP wie üblich nicht dazu, was er eigentlich mit dem Aufbau realisieren will... Mit freundlichen Grüßen Thorsten Ostermann
Ich probiere es noch einmal mit einem Beispiel: Ein PWM-Signal wird über eine Drossel und einen Kondensator gefiltert, wobei die Frequenz so hoch gewählt wird, das die Restwelligkeit vernachlässigbar ist. Fall 1: PWM wird über einen push-pull-Treiber erzeugt und schaltet zwischen V+ und GND mit einem Tastverhältnis von 20%. Am Ausgangskondensator ergibt sich die Spannung 1/5 V+. Fall 2: Das PWM-Signal wird nur aktiv nach V+ geschaltet, es gibt keinen Treiber nach GND (disabled). Der Ausgangskondensator wird auf V+ aufgeladen; die Spannung sinkt erst bei Belastung. Übertragen auf den Motor ist die Drossel seine Induktivität und die im Kondensator gespeicherte Energie die kinetische Energie des Motors. Im 1. Fall dreht der (ideale) Motor mit 20% seiner Drehzahl bei V+. Im 2. Fall dreht er mit gleicher Drehzahl wie bei V+ und hätte ohne Reibungsverluste ernorme Probleme jemals wieder zu stoppen. Die push-pull-Ansteuerung hat den Vorteil, dass eine Bewegung aktiv gebremst werden kann, insbesondere aus voller Fahrt schnell gestoppt werden kann. Dafür braucht man dann für eine Drehrichtung mindestens eine Halbbrücke zur Ansteuerung; ein PWM-gepulster FET kann nicht bremsen.
Angehängte Dateien:
-

DcMotortreiber24V.png
230 KB
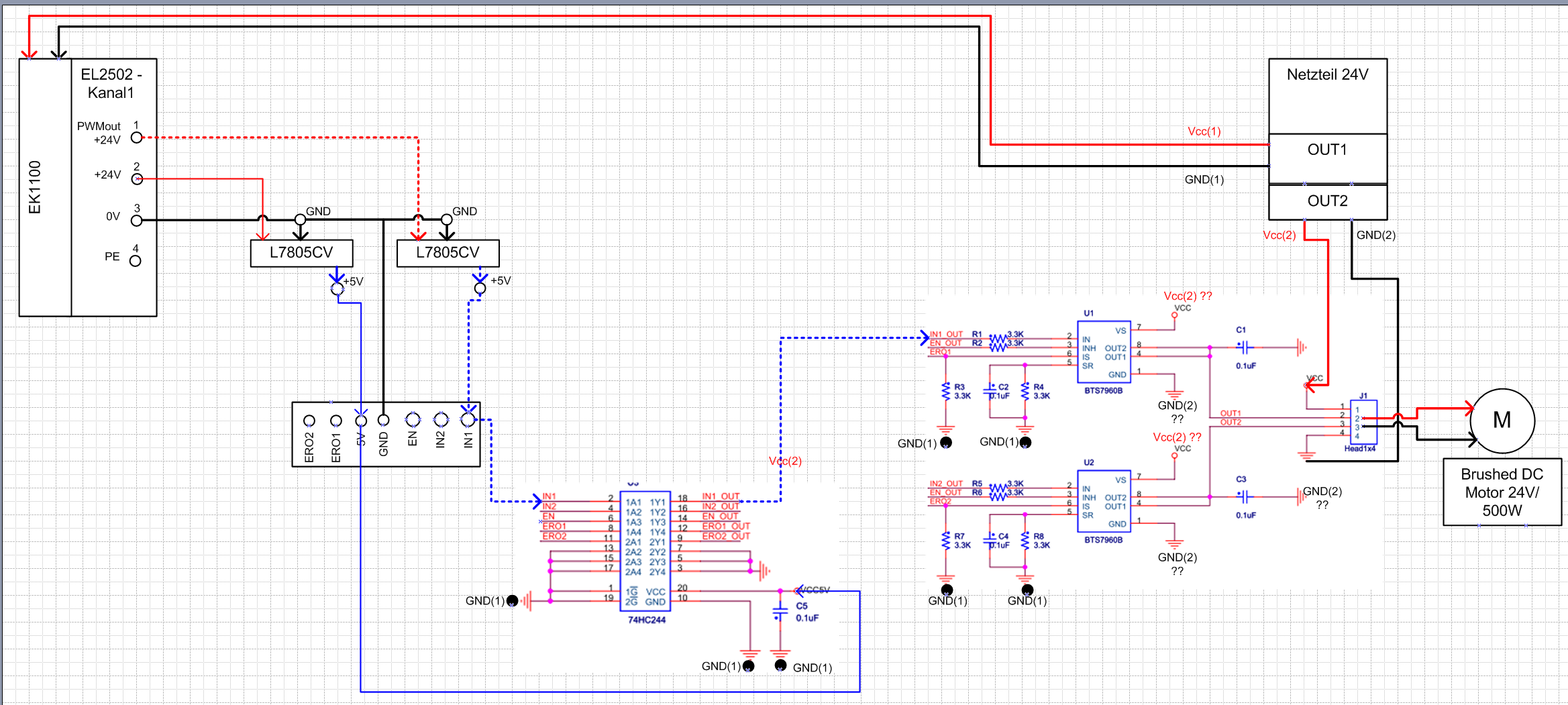
Hallo, erst mal vielen Dank für euere Gedanken und Anregungen. Ich versuch mal alle eure Zwischenfragen zu beantworten. Endziel ist eine Kettenfahrzeug mit dieser Schaltung zu betreiben. Das im Moment ist ein Testaufbau, den ich noch an ein Brett schrauben werde, sodass mir der Motor beim Anlaufen nicht vom Tisch hüpft. So wollte ich dann letzendlich eine Drehzahlregelung implementieren - jetzt aber ist mir nur die Steuerung der Motordrehzahl ein anliegen. Da ich eben Anfänger mit E-Schaltungen bin, hab ich mir einen fertigen Motor-Trieber bei eBay gekauft - damit ich diese eben mit den EtherCAT-Klemmen ansteuern konnte (alles 24V basierend), musste ich die Spannung auf 5V herunterbringen; daher meine Idee mit den 7805. Ich habe nochmals versucht, die Schaltskizze etwas besser zu gestalten. Das was dort professioniell aussieht, ist aus der oben angehängten pdf entnommen (1. Beitrag von mir), die den Schaltplan des Motortreibers darstellt (vom Verkäufer zugeschickt). Meine Beschaltung des Treibers an den jeweiligen Pins war natürlich etwas seltsam: - ERO2 offen - ERO1 offen - 5V (indirekt aus EL2502 über 7805) - GND (indirekt aus EL2502) - EN offen - IN2 offen - IN1 (indirekt aus EL2502/PWM Signal über 7805) PS: Das PWM signal war mit 4kHz konfiguriert PS2: Der Motor ist so ein billig E-Scooter Motor, mit Permanentmagneten. Sein Anlauf ist ziemlich schwer - war das PWM Signal zu niedrig, ratterte der Motor ohne sich zu bewegen. Das Loslaufen und das Stoppen des Motors war schon fast unheilmich knackig - d.h. den musste man gut festhalten.
Thorsten Ostermann schrieb: > Wo steht das? Die PWM wird benutzt um den Strom vorzugeben, von > schwankender Last war nicht die Rede!? m.n. schrieb: > Aber mit 20kHz werden in einem Zyklus weder volle Drehzahl noch > Stillstand erreicht: die Drehzahl des Motors folgt dem Tastverhältnis > der PWM. Auch bei Belastung sinkt die Drehzahl nicht wesentlich. Ok, m.n. Ich glaube jetzt habe ich verstanden wie du dir das denkst. Du fügst durch den Kurzschluss eigentlich nur eine Last hinzu. Wenn jetzt noch eine am Motor dazukommt, belastest du ihn doppelt. Deswegen würde mich mal ein Vergleich von beiden Methoden interessieren. Ich wette, dass bei der Methode ohne Kurzschluss das Drehmoment bei gleicher Drehzahl höher ist als bei der Anderen. Vorausgesetzt der Tastgrad ist relativ gering. Bei 100% macht es natürlich keinen Unterschied mehr. m.n. schrieb: > Die push-pull-Ansteuerung hat den Vorteil, dass eine Bewegung aktiv > gebremst werden kann, insbesondere aus voller Fahrt schnell gestoppt > werden kann. Ja, genau dass ist das Problem, welches ich oben bereits erwähnte. Ich ging davon aus, dass man eben alle 50µs beginnt zu bremsen.
Kevin S. schrieb: > Methode ohne Kurzschluss Es gibt weder eine Methode mit Kurzschluß noch eine Methode ohne Kurzschluß. Ich dachte, das wäre klar geworden; ich geb's auf :-(
Sorry, manchmal stehe ich wirklich aufm Schlauch. Hier geht ist eigentlich nur um slow-current decay. Denn dabei sind beide low- oder high-side Transistoren leitend. Lothar Miller schrieb: > Idealerweise schließt man ihn nicht nur kurz, sondern polt ihn komplett > um. Und das ist dann fast-current decay. Auf dieser Seite http://ebldc.com/?p=86 sind beide Verfahren gut beschrieben. Das relevante für diesen Thread zitiere ich mal: "When it comes to DC motors, however, there is a very interesting effect while using this decay mode. While on fast decay mode the DC motor rotor coasts down in speed, with slow decay mode the rotor stops very quickly. This is because as can be seen by the above picture, you are shorting the DC motor terminals. This in essence implies the BACK EMF voltage source inside the motor to be shorted. And if there is no BACK EMF, there can be no speed. One is directly tied to the other. We call this phenomenon braking the DC motor or the collapse of the Back EMF. Braking is vital when you want to stop your motor very fast and possibly obtain a particular position. With coasting, this would not be possible, so be aware that selecting slow decay or fast decay with DC motors is not a trivial endeavor." Thomas Z. schrieb: > war das PWM Signal zu niedrig, > ratterte der Motor ohne sich zu bewegen. War die Frequenz zu niedrig oder der Tastgrad? > Das Loslaufen und das Stoppen > des Motors war schon fast unheilmich knackig - d.h. den musste man gut > festhalten. Gehe ich recht in der Annahme, dass der Motor nur lief wenn du manuell die 0V an IN1 angelegt hast? Also gar keine PWM an der Platine angeschlossen war? Das dann der Motor sehr stark beschleunigt und bremst ist normal. Deswegen wird der Tastgrad der PWM nur langsam erhöht damit er sanft anläuft. Zum ausschalten kann man ihn entweder auslaufen lassen (EN auf 0) oder den Tastgrad wieder langsam erniedrigen. Für eine Notbremsung kann man beide IN auf das gleiche Potenzial legen. Dann steht er quasi sofort.
Hi,
> War die Frequenz zu niedrig oder der Tastgrad?
Der Tastgrad zu niedrig; d.h. am Voltmeter ergab die PWM im Mittel eine
zu geringe Spannung - das hat dann den Motor und der Massenträgheit des
Rotors wahrscheinlich nicht genug Spannung zum Loslaufen geliefert.
Allerdings bin ich noch immer nicht dahintergekommen, warum der
belastete BTS7960B abgeraucht ist. Selbst wenn alle Pins "korrekt" (was
ich eben für richtig gehalten habe) des Treibers geschalten wurden:
ERO2: offen
ERO1: offen
GND: 0V
5V: +5V
IN2: GND
IN1: PWM 5V
EN: +5V
In dieser Kombination hat auch der High-Pegel des PWM Signals den Motor
sanft laufen lassen - so wie gedacht, ein paar Sekunden lang; dann hat
er geraucht.
Wobei mir aufgefallen ist, dass die +5V Logikversorgung tatsächlich fast
7V waren.
Der Motor direkt am Netzteil angeschlossen läuft - der kann also den
Kurzen nicht verursacht habe; oder?
Ich weiß jetzt echt nicht mehr, wie ich diesen Motortreiber richtig an
meine 24V Klemmen anschließe, ohne was zu brutzeln..
PS: Dass der Motor zu viel Strom zieht, halte ich mal für
ausgeschlossen. Der Treiber sollte 43A aushalten - das Netzteil würde
bei nem Strom >20A abschalten. Der Motor sollte bei voller Kraft, in
etwa 30A ziehen.
Hallo Thomas, Ich vermute das deine PWM Frequenz zu niedrig gewählt war. Bei deiner jetzigen Lösung und zu niedriger Frequenz schaltet der Motor permanent von Beschleunigen auf Bremsen um. Deswegen ruckelt er bei zu niedrigem Tastgrad nur. Wenn du die PWM an EN anschließt und IN1 auf 5V legst, spielt die PWM Frequenz keine große Rolle mehr. Thomas Z. schrieb: > In dieser Kombination hat auch der High-Pegel des PWM Signals den Motor > sanft laufen lassen - so wie gedacht, ein paar Sekunden lang; dann hat > er geraucht. Der Motor oder der BTS7960 hat geraucht? Thomas Z. schrieb: > Wobei mir aufgefallen ist, dass die +5V Logikversorgung tatsächlich fast > 7V waren. Das ist schlecht, der BTS hat als Maximum 5,3V angegeben. Ob das der Grund war kann ich leider nicht sagen.
Ok, danke für die Antwort - dann werde ich die PWM an EN anschließen und die 5V Spannung auch mit echten 5.0 V betreiben - dann hoffe ich mal, dass das funktioniert. (Allerdings muss ich wieder auf die neuen Treiber aus Hongkong warten). Ist es korrekt, den IN2 nicht offen zu lassen, sondern (wenn IN1 auf High ist) den IN2 auf GND zu schalten? (Beide auf High wird wohl wieder qualmen?) Meine orginal-Schaltung hat an sich funktioniert - bis ich den Motor als Last drangehängt habe; dann wars nach ca. 3 Sekunden vorbei - der BTS7960 hatte kurz gequalmt.
Angehängte Dateien:
-

Treiberanschluss.png
140 KB
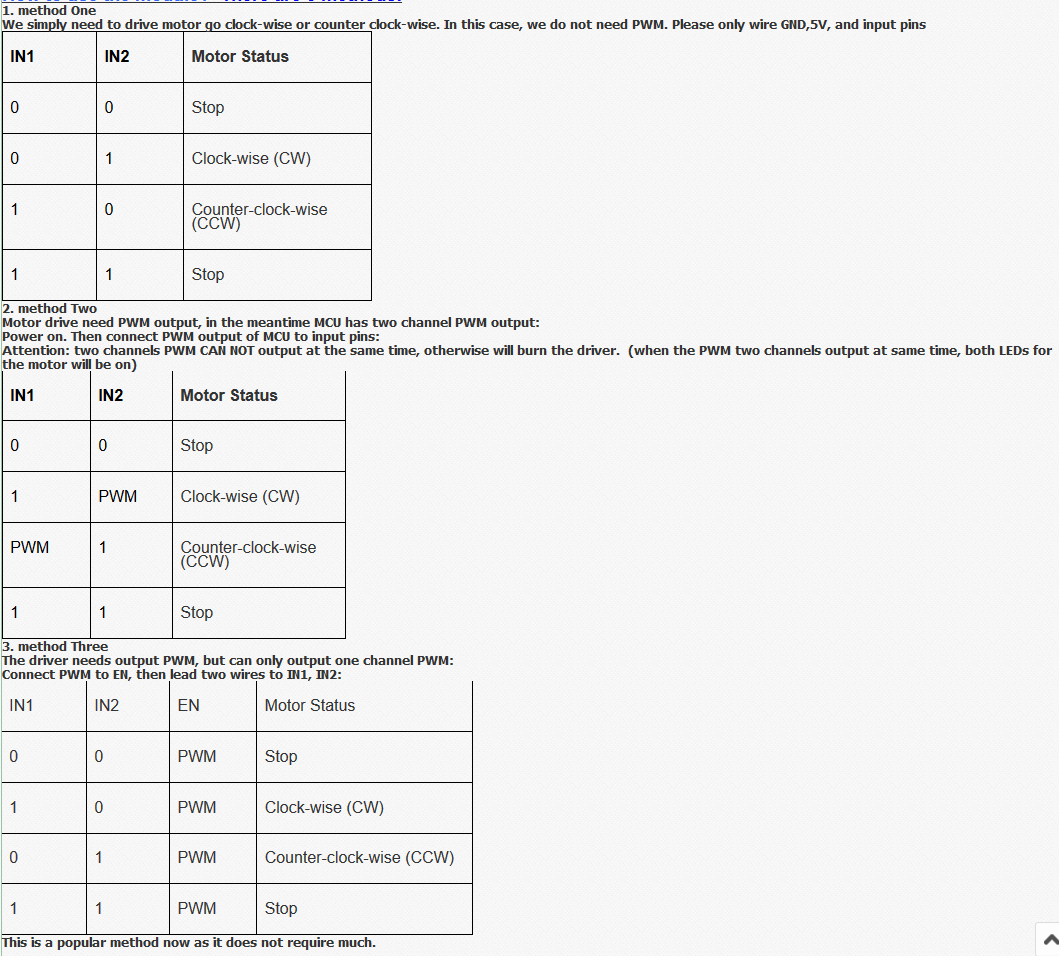
Jetzt hab ich doch glatt ne interessante Info gefunden - vielleicht hilft das anderen auch. Ein eBay Verkäufer hat die drei Anschluss-Modi des Treibers beschrieben, wie dieser zu betreiben ist: http://www.ebay.de/itm/High-Current-DC-Motor-Driver-Module-Board-H-Bridge-PWM-Signal-Control-NEW-/321045121657
Thomas Z. schrieb: > Jetzt hab ich doch glatt ne interessante Info gefunden - vielleicht > hilft das anderen auch. Nur, was dort nicht steht, ist die erhöhte Verlustleistung in den Treibern sofern PWM an EN liegt. Ich hoffe, Du hast nicht nur einen Treiber neu bestellt.
Hi, ich hab nun sowohl meine Kühlbleche ausgegraben, als auch mehere Treiber bestellt. Das müsste doch klappen (?) Außerdem war die PWM noch falsch konfiguriert: 250 Hz anstatt 4kHz
Thomas Z. schrieb: > Ist es korrekt, den IN2 nicht offen zu lassen, sondern (wenn IN1 auf > High ist) den IN2 auf GND zu schalten? (Beide auf High wird wohl wieder > qualmen?) Nein qualmen tut dann nichts. Du bestimmt mit IN1 und IN2 die Drehrichtung. Wenn der eine auf high und der Andere auf low ist dreht er sich in die eine Richtung, tauschst du bei beiden die Pegel, in die Andere. Wenn du an beide das gleiche anlegst bremst der Motor. Thomas Z. schrieb: > Außerdem war die PWM noch falsch konfiguriert: 250 Hz anstatt 4kHz Das könnte ein Grund gewesen sein. Bevor du wieder neue Versuche unternimmst, denk dran den 7805 aus der PWM Leitung zu entfernen und durch einen einfachen Spannungsteiler zu ersetzen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.