Einen wunderschönen guten Mahlzeit alle miteinander. Ich möchte mir aus einem Kombiinstrument eine Uhr bauen. Der Tacho enthält 2Lavet schrittmotoren für die Zeiger. Die tachoelekronik wird nicht benutzt, sondern eine externe Platine zur Ansteuerung. Wie der Lavet-Motor arbeitet und angesteuert wird weis ich, nur meine Frage bezieht sich eher darauf: Die Motoren müssen ja für einen kompletten Ausschlag eine gewisse Schrittzahl vollführen. Diese kann man ja in dem man immer 1 + und 1 -Puls mit konstantem Strom auf den Motor gibt, macht er ja einen Schritt. Nun, da der tacho pro Zeiger 2 hat um die Nadel nach links und rechts zu führen, und Mann die gesamtschrittzahl (z.B. Bei Drehzahl und km/h 360 Schritte pro Richtung ) geht es jetzt darum, wie ich sie ansteuere, -besonders da ich eher ein hardwaremäßiger Typ bin- mit was es am einfachsten geht. Arduino oder sowas in der Art. Dass "Programm" soll auf Drehzahl die Minuten, und auf Gescheindigkeit die Stunden anzeigen. Wie bringe ich nun dem Mikrocontroller bei dass we wenn es 20:20 Uhr ist, den tacho auf 200 km/h bewegt, den drehzahlmesser auf 2000 stellt. Der Tacho ist in gleichen Abständen geteilt, der Drehzahlmessser auch. Also die Software muss auch angelernt werden auf das Kombiinstrument. Die ganggenauigkeit ist nicht 1000% wichtig, mir geht es ums Projekt ansich. Pc, Netzteile, konstanter und Frequenzgenerator sind vorhanden, oszi keins. Wenn ich mich etwas verschlungen Ausdrücke entschuldige ich mich, habe mit Microcontrollern noch nicht allzuviel zutun gehabt. :) Ich sage schonmal danke für antworten und Anregungen. Gruß Dr.Voltage :)
Ich werde aus deiner Beschreibung nicht ganz schlau. Willst du uns ernsthaft erzählen, dein Tacho hätte pro Zeiger 2 Schrittmotoren? Wie soll das gehen? Oder meinst du zwei Motorwicklungen? Das wäre normal. Schrittmotoren für Tacho-Anwendungen enthalten oft ein kleines Getriebe und Endanschläge, können also keine vollständige Umdrehung abdecken. Was ist das für ein Kombiinstrument? Kannst du mal ein Bild hochladen (Dateigröße beachten)? Mit freundlichen Grüßen Thorsten Ostermann
Angehängte Dateien:
-

image.jpg
360 KB
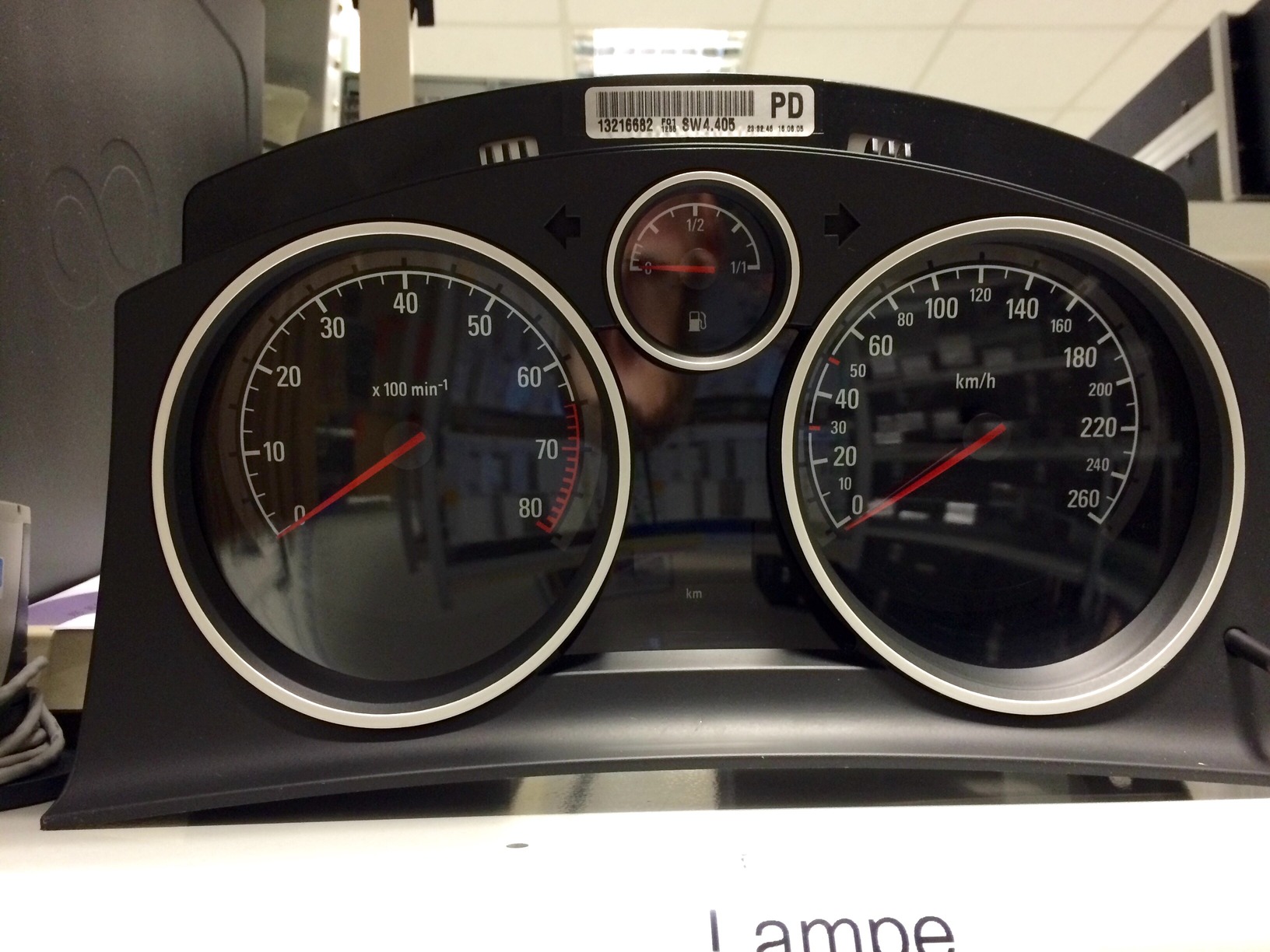
Hallo Torsten, Ja 2 motorwicklungen, da habe ich mich selber vertan. Sorry :) Endanschlage hat der Tacho, die liegen am Anfang bei 0, und der endanschlag nach dem Skalaende. Die Zeiger mussten wenn sie eine halbe Drehung vollführt haben, dann eben wieder auf Null springen, bzw. Zurückgefahren werden damit sie die korrekte Zeit anzeigen. Dass ist ja dass kniffelige. Dass ist das Bild vom tacho, habe ein Bild hochgeladen. Bilder von der Rückseite folgen noch die Tage. Gruß
Thorsten Ostermann schrieb: > Willst du uns ernsthaft erzählen, dein Tacho > hätte pro Zeiger 2 Schrittmotoren? Egal was der TO uns erzählen will, Tacho- und Drezahlanzeigen erfolgen bei neuern Autos wirklich über Schrittmotoren. Bessere lineare Anzeige, "Lupenfunktion" des wichtigen Geschwindigkeitsbereich von 20....60km/h.
Hallo Reinhard, > Thorsten Ostermann schrieb: >> Willst du uns ernsthaft erzählen, dein Tacho >> hätte pro Zeiger 2 Schrittmotoren? > > Egal was der TO uns erzählen will, > Tacho- und Drezahlanzeigen erfolgen > bei neuern Autos wirklich über > Schrittmotoren. Das ist mir hinlänglich bekannt [1]. Aber nicht mit 2 Motoren für einen Zeiger. Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.schrittmotor-blog.de/die-sache-mit-der-spannung/ (4/2011)
Das mit den 2 motoren war ein Irrtum meinerseits, da diese motoren ja nur in eine Richtung laufen können. Habe bisher nur mit Uni-oder Bipolaren schrittmotoren gearbeitet. Der Lavet motor ist für mich absolutes Neuland, was die Ansteuerung angeht.
Habe mir nun einen account nun erstellt, ich bin Dr.Voltage (war nur ein Synonym) :) Mit was wäre denn eine Ansteuerlösung "leicht und einfach" zu realisieren? Besonders nicht allzu groß von der Bauform her? Arduino uno? Oder ein anderer Microkontroller? Und wieviel Leistung benötigt denn so ein lavet Motor so im schnitt, besoders da die Tachonadeln ja fast nix wiegen? Gruß Jens
Hallo Jens das ist ja mal 'ne coole Idee. So ein Tacho würde ich auch gerne als Uhr umbauen. Ist das vom Schrottplatz? Die Ansteuerung erfolgt sicherlich wie ein normaler Schrittmotor. Ist aber auch egal, wenn man das ausgetestet hat kann man die Ansteuerung ganz einfach bauen. Einen Microcontroller und ein paar Bauteile sollten dann reichen. Ich denke die Steuerplatine samt Batterie passt in eine Zigarettenschachtel (mal so als Anhaltspunkt) Gruß Panik
Danke für deine Antwort Panik :) Ja diese Idee überkam mich während ich auf dem Schrottplatz mal unterwegs war, und da hab ich mir den Astra H Tacho günstig mitgenommen. Am besten suche auf einem Schrottplatz mal nach Tachos. Man kann dass habe ich schon getestet die "älteren Tachos mit Messwerk einfach per PWM ansteuern. Dann schlagen die zeiger dank der Trägheit des Messwerkes ganz normal aus. da ist halt testen angesagt, ab wieviel Volt der was anzeigt. Diese sind einfacher, aber mich reizt es mit den Schrittmotoren besonders :) Ok danke für dsien Einschätzung, klein ist deswegen wichtig da er an der wand hängen oder auf dem Tisch stehen soll, Batteriebetrieb ist noch nicht Sicher :) der Vortiel an schrittmotor-Tachos ist dass sie viel Dünner als Messwerktachos sind, (nur die zeiger, mit dem Gehäuse hinten, die scheiber und rahmen vorne die man bei meinem sieht kommen weg, da dass ding sonst zu wuchtig wird)
MoinMoin, ein schönes Projekt hast du dir da ausgedacht! Eine kleine Idee/Anregung: Ich würde die Skalen drin lassen. Mit der Geschwindigkeit hast du eine wunderbare 24h Skala (0-240km/h) und mit dem Drehzahlmesser die Minuten 0-60 (0-6000/min). Und dann am Ende der Stunde den Drehzahlmesser wieder auf Null, und wenn der Tag alle ist, darf der Tacho auch wieder für nen Moment stillstand zeigen. MfG Chaos
j. t. schrieb: > Idee/Anregung: Ich würde die Skalen drin lassen. Mit der > Geschwindigkeit hast du eine wunderbare 24h Skala (0-240km/h) und mit > dem Drehzahlmesser die Minuten 0-60 (0-6000/min). Danke j.t, die Skalen bleiben auch drinnen. so war es ja geplant. deswegen wenn ihr sowas auch machen wollt, muss der Drehzahlmesser bis Minimum 6000 U/Min und der Tacho bis min. 240 gehen. Und als Spielerei wenn man noch genug Pins frei hat am Microcontroler kann man sich über Tankanzeige den Batteriestand anzeigen lassen, und über Kühlwasser den gesamtfortschritt im Jahr :)
Guten Abend alle Miteinander. Habe mir Mittlerweile Gedanken gemacht, und als Controller wird ein Arduino Uno herhalten. Spannung bekommt er übers Netzteil, und die Leistung des Arduinos sollte reichen um die Motoren zum bewegen zu bringen. die Tachobeleuchtung wird per externem PWM Controller gespeißt, nur muss ich mir noch eine Lösung für die SMD LED`s suchen, oder es wird ein led Band unter der Tachoscheibe eingezogen. Hauptsache es Laufen die Nadeln erstmal. Werde euch wieterhin auf dem laufen halten, Bilder folgen demnächste :)
Dr.Voltage schrieb: > (..) Wie bringe ich nun dem Mikrocontroller bei dass we wenn es > 20:20 Uhr ist, den tacho auf 200 km/h bewegt, den drehzahlmesser auf > 2000 stellt. Die Anzeigen haben keine Lagerückmeldung, Du musst also Schritte zählen. Beim Einschalten fährst Du erstmal kräftig nach links, so dass der Zeiger in jedem Fall am Anschlag ankommt (wie ein altes Floppylaufwerk - brrrz). Danach geht es dann für jede Stunde bzw Minute um die vorher ermittelten Takte nach rechts. Da die Zeiger auch mal verrutschen können, sollte man die Rekalibrierung zyklich wiederholen. Du kannst z.B. immer um Mitternach, wenn 0, 0 eingestellt wird, beide Zeiger auf -1 fahren. So ist sichergestellt, dass sie in jedem Fall auf dem Nullpunkt sind und nicht kurz dahinter.
Vielen Dank soul eye, dass ist hilfreich. Auf die Idee kam ich garnicht. Werde ich dann nachdem ich die Schritte gezahlt habe so einprogrammieren, dass er wen er auf 0 Fährt eben noch ein bis 2 Schritte an den Anschlag fährt.
Die Projektidee finde ich aus klasse! Hier ein paar Links https://www.tindie.com/products/TheRengineer/analog-gauge-stepper-breakout-board/ Zitat "The Switec is the same motor used in many automotive dashboards. The Switec motor only draws 20ma per coil. " http://guy.carpenter.id.au/gaugette/2012/01/24/attack-of-the-switec-clones/ Datenblatt Data Sheet Miniature Stepper Motor M-S X25 series , Microcomponents , switec http://guy.carpenter.id.au/gaugette/resources/switec/X25_xxx_01_SP_E-1.pdf Software Library http://guy.carpenter.id.au/gaugette/ Gruss
Ich hab eines immer noch nicht verstanden. So ein Lavet Motor dreht ja erst mal immer nur in eine Richtung. Wie funktioniert das dann bei Instrumenten. Da muss ja der Zeiger auch in die andere Richtng bewegt werden können. Sind da dann 2 versetzte Spulen drinnen?
Angehängte Dateien:
-

image.jpg
560 KB

Hallo Erich, schön dass meine Idee so gute Resonanz findet :). Und vielen Dank für deine Links, die helfen mir sehr, besonders was Stromaufnahme etc. Angeht. Karlheinz, ja da sind 2 Versetzte spulen drin, damit 2drehrichtungen möglich werden. Anbei ein Bild von der Platine mit den motoren drauf
Ergänzend zur Info von 29.10.2014 12:56 habe ich jetzt herausgefunden, warum der "alte" Link zu X25 Motor nicht mehr funktioniert (war was mit microcomponents.ch ) Weil Swatch den Laden verkauft hat an eine Fa. "Juken Technology" http://www.swatchgroup.com/en/services/archive/2009/swatch_group_sale_of_microcomponents_automotive_business_activities_to_juken_technology Juken Technology hat zwar eine Internetseite aber keine Info dort; den Link erspare ich mir hier (nur ein kleines Produktbild des X25 Motors findet man dort). Nichtmal auf ihre verbliebene Schweizer Dependance geben sie einen Hinweis (wohl weil das geheim ist) http://www.jukenswisstech.com/ Dort wiederum ist unter Produkten der Motor X25 geheim, nur einen Nachfolger X27 gibt es http://www.jukenswisstech.com/?page_id=103 Allerdings ist eine Sammelseite vorhanden, auf welcher der X25 Motor noch gelistet ist http://www.jukenswisstech.com/?page_id=109 Aber - wie die geneigten Leser jetzt bestimmt schon vermutet haben - Natürlich sind alle Datenblätter der Schrittmotoren GEHEIM. Daher möchte ich hier nochmals den Link von down under hochloben. Dort ist als "VID29 Series Stepper Motor" auch ein Chinanachbau zu besichtigen http://guy.carpenter.id.au/gaugette/resources/ Bei Ebay findet man mit: X25 Stepper Motor Angebote zu einzeln oder auch im 250-Stück-Bundle (weltweite Suche wählen) Gruss
Vielen dank für deine Mühe Erich, jede Info die mir den Schrittmotor leichter zum Bewegen bringt hilft mir viel :) Werde wenn ich dazu komme die schritte zählen und dann hier reinschreiben. Dann wird auch die tage der Arduino Uno eingekauft. Nur eine Frage zum Arduino: Kann der Arduino diese Speziellen Pulse (Einmal Positiv und negativ für'n lavet Motor) auch wirklich ohne weiteres ausgeben? oder Benötige ich dazu noch Zusatz Hardware? Gruß Jens
Hallo Allerseits. habe mir Gedanken gemacht, und da mir eine Mikroschrittansteuerung der Zeiger zu aufwändig ist und für Nachahmer auch schwer zu realisieren ist. Also: Modellbauservos sind dafür Prädestiniert. Die Winkel sind offiziell nur mit 0-120 Grad angegeben. Servos haben aber meistens 270 Grad, und dass wird bei meinem Tacho benötigt, da ich von 0auf6000 rpm 230 Grad habe, von 0auf 240 Kmh ebenfalls ca. 230 Grad. Um zu testen wie weit es geht, Servo nehmen, servohorn aufstecken, und an beide Anschläge per Hand bewegen. dann weiß man ca. wie weit die läuft. Die Ansteuerung liegt dem Arduino eher als 2 Schrittmotoren im Microstep-betrieb zu halten. Die Servos nehme als Signal einen Positiven Puls mit ca. 5V, Dauer ist von 0,7 MS bis 2,2 Millisekunden (0,7 0 Grad, 2,2 270 Grad als Beispiel, jede Servo ist da immer ein wenig eigen). Danach sind 20 Millisek. pause (damit die servo die Position fahren kann) und dann wieder ein Puls. Die Pause ist auch bei 10 millisek. zu setzen, dann ist die refreshrate höher, nur da heißt es auch wieder: testen. Nun, da der Drehzahlmesser Häufiger in Bewegung ist, kann man es so machen: Uhrzeit ist 21:30. Der Tachozeiger dreht auf 210 Km/h (sagen wir 1,8 millisek pulsweite) dann schaltet der Arduino dass Steuersignal ab und die Servo bleibt ohne brummen auf Position. Der Drezahlnadel dreht auf 3000 rpm, und da steht die Nadel still. also Springt die Nadel alle 10 min weiter (3000-4000 Rpm, dann schaltet dass Signal ebenfalls ab. Variante 2 wäre, dass der Drehzahlmesser Zeiger sich kontinuierlich Bewegt, was einen schöneren Effekt zur folge hat, jedoch der Stromverbrauch sowie die Geräuschkulisse höher ist, außer man benutzt digitalservos. da wir die signalweite von 0,7 Millisek. bis zu 1,8 Millisek stufenlos erhöht, je Genauer man die milliskeunden staffelt, desto höher ist die "Genauigkeit". Man könnte auch einen Schalter einbauen der die Uhr in einen nachtmodus schaltet.
Wenn du meinst es besser zu wissen als die Hersteller der Kombiinstrumente, dann nimm halt Modellbauservos. Ob das wirklich einfacher für den Arduino ist wage ich zu bezweifeln. Zumindest bleibt der Schrittmotor einfach stehen, wenn das Timing im Controller mal nicht stimmen sollte. Der Modellbauservo fährt dann ggf. in eine der Endlagen. Mit freundlichen Grüßen Thorsten Ostermann
Wie gesagt, dass ist auch ne Idee, welche "umgesetzt" wird, muss ich noch genauer testen, habe in den letzten Tagen wenig Zeit dafür gefunden.
Jens Harbers schrieb: > Hallo Allerseits. > > habe mir Gedanken gemacht, und da mir eine Mikroschrittansteuerung der > Zeiger zu aufwändig ist ? Wo kommt da jetzt Mikroschritt her? So ein Lavet Motor ist doch trivial anzusteuern. Ich versteh überhaupt nicht, wo da jetzt das Problem liegt. > und für Nachahmer auch schwer zu realisieren > ist. möglich. Das schwierigste dürfte sein, so einen Motor zu bekommen. Persönlich denke ich allerdings, das es nicht um die 'Nachahmer' geht, sondern darum, dass du komplett daneben stehst. > Also: Modellbauservos sind dafür Prädestiniert. Modellbauservos sind für vieles prädestiniert. Aber dafür ganz sicher nicht. > Die Servos nehme als Signal einen Positiven Puls mit ca. 5V, Dauer ist > von 0,7 MS bis 2,2 Millisekunden (0,7 0 Grad, 2,2 270 Grad als Beispiel, > jede Servo ist da immer ein wenig eigen). Danach sind 20 Millisek. pause > (damit die servo die Position fahren kann) Nö. D.h. die 20ms sind schon ok. Aber der Grund ist falsch. > und dann wieder ein Puls. Die > Pause ist auch bei 10 millisek. zu setzen, dann ist die refreshrate > höher, nur da heißt es auch wieder: testen. Ich frage mich, wie die eine vergleichsweise komplexe Servosteuerung hinkriegen willst, wenn du es nicht schaffst, 2 Pins abwechselnd alternierend 0 bzw. 1 zu setzen und mitzuzählen, wie oft du das getan hast.
Thorsten Ostermann schrieb: > Wenn du meinst es besser zu wissen als die Hersteller der > Kombiinstrumente, dann nimm halt Modellbauservos. Ob das wirklich > einfacher für den Arduino ist wage ich zu bezweifeln. Nun, für den Arduino gibt es da fertige "Shields" und Programme im INet. Ob es das gleiche auch für Schrittmotoren gibt, weiss ich nicht. Aber natürlich sind Schrittmotore auch nicht so schwer zu beherrschen (Insbesondere nicht für Dich :-) ). Da die Schrittmotore ja schon fertig vorhanden sind, spart man sich eine Menge an mechanischen Umbau. Servos würde ich eher für historische Tacho/Drehzahlmesserinstrumente nehmen; insbesondere, wenn das Tacho noch mechanisch arbeitet. Gruss Harald
Hallo, also, die servos sind nachdem ich Malwieder dazukam mich mit meinem tacho zu beschäftigen, gestorben. Werde mir da ein Shield die Tage kaufen, aber eines dass 2 schrittmotoren auf einmal unterstützt, die Schritte sind mehr als fein genug aufgelöst, werde Die Schritte aber mit dem Arduino Zählen, also per Taster immer einen Schritt vorwärts. Nundenn, der Tacho soll ja auch leuchten im Dunkeln, und da wird's frickelig. Denn: mein tacho gibt sein Licht über PLCC2 LED's, 2,3 V, 25mA ab. Nur der controller steuert mehrere Bereiche einzeln, also muss ich den Controller entweder über den Originalstecker zum laufen bekommen, oder jede einzelne led bekommt ihren eigenen Anschluss, über dünne isolierte Litzen. Nur der Tacho muss erst seine Zeit anzeigen bevor er leuchten darf. Um die Uhr zu stellen, habe ich mir 2 Taster angedacht, die je die Stunden 1 Stunde vor, und die Minuten eben 10 min Weise vorstellt. Dass der Minutenzeiger dann wirklich jede Minute anzeigt kommt auch noch, nur erst sollte er im Grunde mal sich bewegen.
Angehängte Dateien:
-

IMG_3135.JPG
1,5 MB
So sorry dass es nicht anders geht aber ich kann nur 1 Bild hochladen 2 oder 3 auf einmal mag er nicht
Jens Harbers schrieb: > So sorry dass es nicht anders geht aber ich kann nur 1 Bild hochladen 2 > oder 3 auf einmal mag er nicht Auf den ersten Blick: Maniküre nötig, Hypovitaminose.
Marc Vesely schrieb: > Auf den ersten Blick: > Maniküre nötig, Hypovitaminose. Sind eben Arbeiterhände ;) Wenn du diese "Wölkchen" (Leukonychia punctata) im/am Fingernagel meinst: Sind Lufteinschlüsse wie ich erfahren habe, die von Verletzungen am Hinteren Teil des Nagelbettes herrühren. Und nun wieder Back-to-Topic
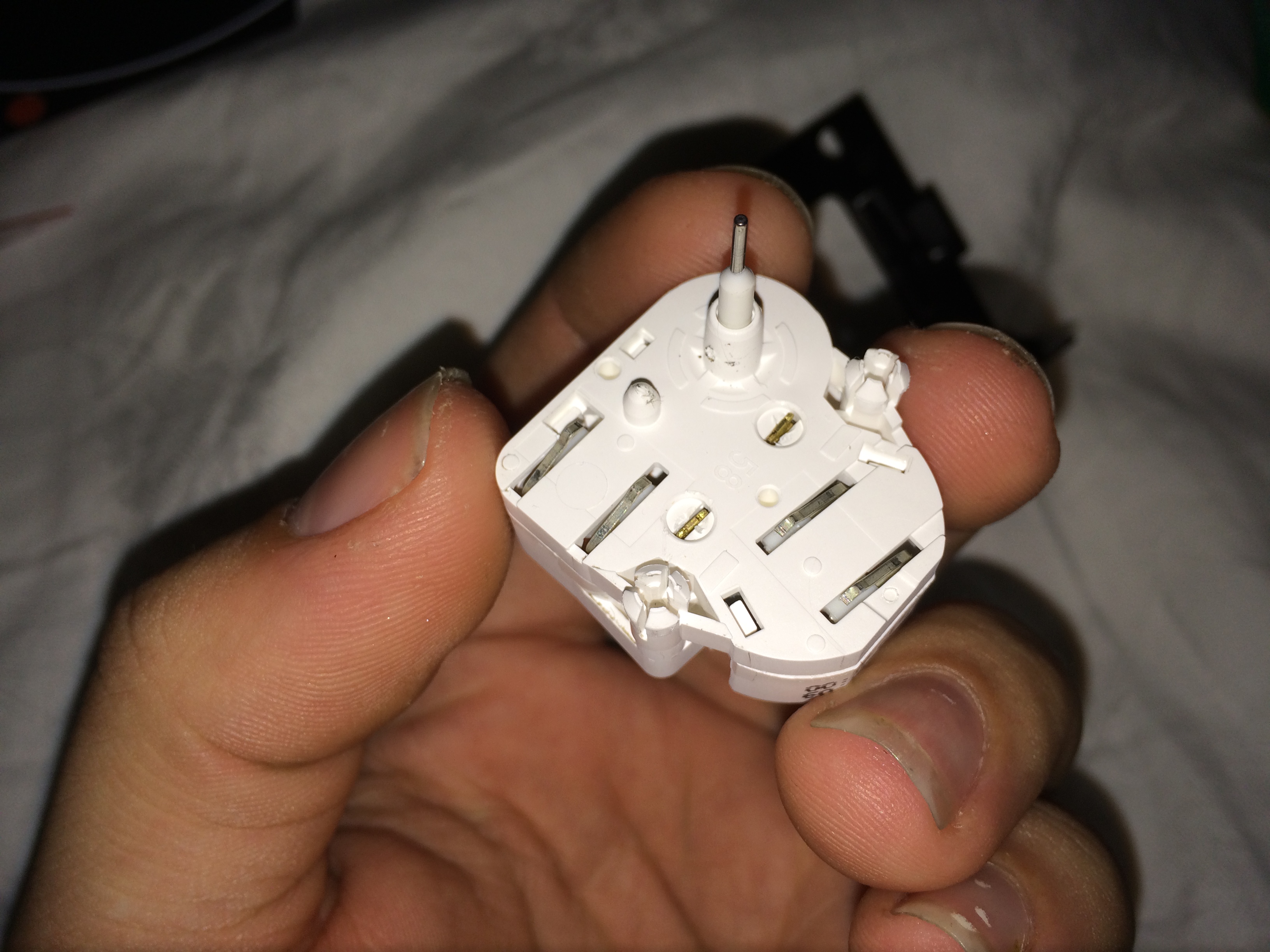
Jens Harbers schrieb: > So sorry dass es nicht anders geht aber ich kann nur 1 Bild hochladen 2 > oder 3 auf einmal mag er nicht Das eine Bild reicht ja auch. An der Bauform kann man erkennen, wie's ungefähr funktionieren muß. Diese Dinger haben wohl einfach zwei Statorsysteme drinne, die auf einen gemeinsamen Rotor arbeiten und gegeneinander um einen gewissen Winkel versetzt angeordnet sind. D.h.: Die Ansteuerung müßte ganz einfach so funktionieren, dass je eine der Spulen alleine für eine Drehrichtung zuständig ist. Pro Drehrichtung sind dann, wie für Valet-Motore üblich, kurze Pulse wechselnder Polarität anzulegen. Interessant wäre jetzt noch der DC-Widerstand einer solchen Spule. Da der Strom bereits bekannt ist, den sie benötigen, könnte man dann problemlos eine Schaltung zur Ansteuerung entwickeln. Falls der Widerstand 250Ω oder geringer ist, sollten die µC-Pins alleine zur Ansteuerung genügen. Falls der Widerstand >250Ω ist, braucht man mehr als 5V zur Ansteuerung. Dann genügen die µC-Pins nicht mehr und es wird auf zwei externe H-Brücken zur Ansteuerung hinauslaufen müssen. Die gibt es fix und fertig zu kaufen. Erst wenn man die Sache soweit abgeklärt hat, DANN kann man über das Programm nachdenken. Das muß nämlich bei den beiden Varianten recht unterschiedlich arbeiten.
Danke C hater für deine Antwort Also: Ich habe die mal mit 2-3Volt und Strombegrenzung angesteuert. Mann muss erst an den einen Pinppaar (je eine Spule) Spannung draufgeben, sieht so aus:
1 | S P U L E 1 S P U L E 2 |
2 | PINS: 1 | 2 | 3 | 4 | |
3 | |
4 | + - | . . 1 schritt vorwärts |
5 | |
6 | . . | + - 2. Schritt vorwärts |
7 | |
8 | - + | . . 3. schritt vörwärts |
9 | |
10 | . . | - + 4. schritt vorwärts |
11 | |
12 | . = keine Spannung/GND angelegt. |
Für rückwärts einfach alle Polungen tauschen. So muss der angesteuert werden damit der Motor nach vorne bzw. Hinten läuft. also ne H-Brücke muss da denk ich benutzt werden, da ich nicht an alle Pins je Steuersignal und GND anschließen kann ohne dass mein Arduino die Rauchmaschinenfunktion aktiviert. Ich habe mal einen Motor geöffnet, es waren 2 Spulen, um ca. 90 Grad versetzt, die einen Gemeinsamen Stator, und natürlich auch den selben Rotor haben, der über ein Schneckengetriebe dann den zeiger antreibt. Der Spulenwiderstand wird heut Abend mal rausgemessen.
Jens Harbers schrieb: > Danke C hater für deine Antwort Du bedankst dich, obwohl du offensichtlich rein garnix davon verstanden hast? Seltsam. Der springende Punkt war eine leicht zu messende Größe, nämlich der DC-Widerstand der Statorspulen. Wie hoch ist der denn nun? Ein Meßgerät, mit dem du das ermitteln kannst, kostet im Baumarkt schlappe 5€. Und es mal an die Anschlüsse dranzuhalten und das Ergebnis abzulesen und zu posten dauert keine Minute. Also, wo zum Teufel, ist jetzt dein Problem dabei, das einfach mal zu tun? Übrigens: Wenn du so ein Meßgerät tatsächlich erst kaufen müßtest, dann kauf' am besten gleich eins, was auch die Messung von Induktivitäten ermöglicht. Das gibt's zwar nicht für 5€ im Baumarkt, aber für knapp 30€ bei Reichelt. OK, das ist wesentlich mehr Geld, aber das Wissen um diese Größe erlaubt eine viel effizientere Softwareentwicklung. Man kann dann nämlich schon im Voraus näherungsweise ausrechnen, wie lange der Strom fließen muß, um mit minimalen Energieeinsatz (und damit minimaler Wärmeentwicklung) eine Bewegung zu erzeugen und muß nicht erst in die Software die Möglichkeiten einbauen, um das ausprobieren zu können. > Also: Ich habe die mal mit 2-3Volt und Strombegrenzung angesteuert. > Mann muss erst an den einen Pinppaar (je eine Spule) Spannung > draufgeben, sieht so aus: >
1 | > S P U L E 1 S P U L E 2 |
2 | > PINS: 1 | 2 | 3 | 4 | |
3 | > |
4 | > + - | . . 1 schritt vorwärts |
5 | > |
6 | > . . | + - 2. Schritt vorwärts |
7 | > |
8 | > - + | . . 3. schritt vörwärts |
9 | > |
10 | > . . | - + 4. schritt vorwärts |
11 | > |
12 | > . = keine Spannung/GND angelegt. |
13 | > |
> Für rückwärts einfach alle Polungen tauschen.
Das ist Unsinn. Es handelt sich eben NICHT um einen üblichen Stepper,
sondern um einen Valet-Stepper mit zwei Statoren. Dementsprechend macht
diese Ansteuerung nach klassischem Bipolar-Stepper-Schema absolut keinen
Sinn.
Auch die Tatsache, daß sich unter bestimmten Randbedingungen trotzdem
was bewegt, ändert daran absolut garnichts. Das mußt du einfach mal
begreifen. Und wenn du es nicht begreifen kannst, dann mußt du es eben
einfach glauben. Und wenn du auch das nicht willst, dann wirst du dir
zukünftig bei deinem Problem schlicht selber weiter helfen müssen,
jedenfalls soweit das mich betrifft...
Also ich habe mehr als genug Messgeräte, nur wenn man um diese Zeit noch auf der Arbeit ist geht's messen leider etwas schlecht wenn der Tacho sich daheim befindet. Weil WLAN Strom gibt es zum Teufel nochmal nicht. Ich weiß, dass ich einen Lavet Stepper mit 2 Spulen habe, davon 2 Stück in dem Tacho, wenn's die Tankanzeige mitnimmst 3. Und ich lasse mir gerne helfen, nur ich hab mit Lavet Steppern nichts zu tun gehabt bisher, und ich habe es einfach Probiert, und kam zu dem Ergebnis dass du mir zitiert hast, also ne Bipolare Ansteuerung. Nun denn, dann sag mir Bitte wie deiner Meinung nach ich versuchen soll den Motor anzusteuern, mit meinem Arduino, der keine H Brücke integriert hat. Den Widerstand der Spule wirst du bekommen, noch heute Abend messe ich den heraus. Du hast es geschrieben, aber der Arduino kann dass nicht, + und - auf einen Pin zu legen. Nur da ich jede hilfe gut benötigen kann, unterhalten wir uns ganz sachlich darüber. Ich schreib ganz am Anfang dass ich eher mit der Puren Hardware arbeite, mit Mikrocontroller und sowas hatte ich bis vor 3-4 Wochen wenig zu tun. Und bedankt hab ich mich dafür, dass du mir überhaupt geantwortet hast, aber ich wird mir dann diese Freundlichkeit ersparen.
Angehängte Dateien:
-

image.jpg
1,1 MB

Zum Thema 2 Statoren, es Sind 2 Verbundene. Da lagst du richtig, aber durchs goldene Blech werden die 2 auch eins wiederum. Und ich habe deinen Vorschlag mit einer Spule für eine Richtung berücksichtigt: Er macht Schritte, nur größer, und willkürlich. Mal geht er nach vorn, mal nicht. Wenn ich meine ansteuermethode anwende, geht er kontrolliert dahin wo ich will dass er hingeht. Spulenwiederstand sind 150 Ohm, habe alle spulen im tacho gemessen, alle bei 150 ohm. Gruß Jens
In der aktuelle Elektor findest Du die simple Ansteuerung samt Quellcode. Ist ein normaler bipolarer Schrittmotor den man über 4 IO-Pins ansteuern kann. Hab es gerade mit einem kleinen PIC getestet und bei 5V Versorgung schafft an pro Schritt etwas 3ms... Gruß René
René schrieb: > In der aktuelle Elektor findest Du die simple Ansteuerung samt > Quellcode. Ist ein normaler bipolarer Schrittmotor den man über 4 > IO-Pins ansteuern kann. Hab es gerade mit einem kleinen PIC getestet und > bei 5V Versorgung schafft an pro Schritt etwas 3ms... > > Gruß René Hallo René, danke für deine Antwort. Ich lasse aktuell den Motor über den Arduino im microstep laufen, und ist wie es sein sollte, eine flüssige leise Bewegung. Aber ich danke dir trotzdem für deine Unterstützung meiner These dass diese Motoren Bipolar sind. Gruß Jens
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.