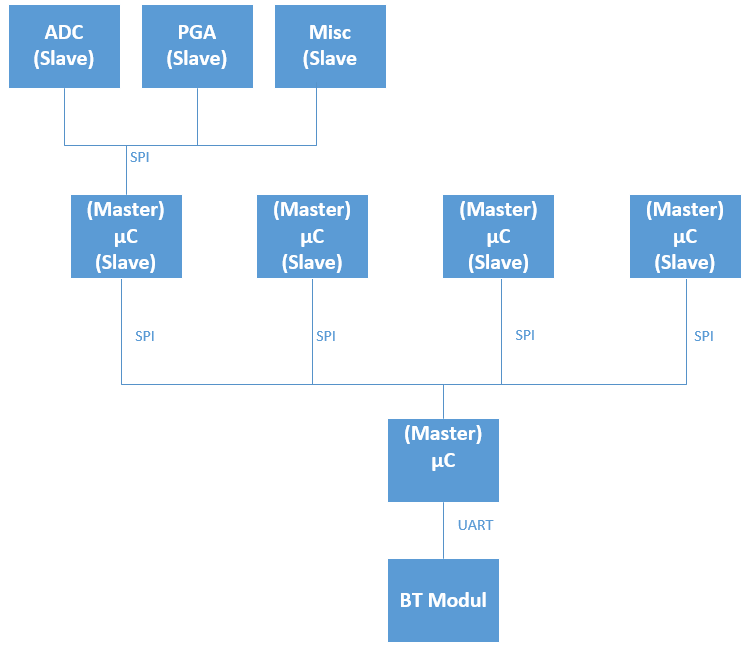
Hallo, folgendes Scenario: Ein AVR(zB 644) ist über UART (Bluetooth SPP) mit dem PC verbunden und nimmt Benutzereingaben entgegen und schickt gemessene Daten zurück. Bis zu 4(?) AVR (auch 644 o.Ä.) sitzen auf identischen Modulen, die DAQ Hardware (PGAs, 8CH 16Bit ADC,...) bereitstellen und holen sich hier vom ADC mit sagen wir 1ksps/channel daten. Interface auf den Modulen ist SPI. Nun die Frage/das Problem: Die Datenraten sind erheblich (pro DAQ Modul sagen wir 6ksps à 16 Bit + package info (8Bit) ~ 18kbyte/s). Die müssten nach dem obigen Scenario erst vom ADC an den Modul-µC und dann vom Modul-µC an den Main-µC. Dieser allerdings bekäme von bis zu drei anderen Modulen ja auch noch Daten "gleichzeitig". 1. Ist es überhaupt möglich das ganze lediglich über SPI zu lösen? Im Prinzip wäre ja der Main-µC der Main Master, die Modul-µCs die Master für die Peripherie aber Slaves für den Main-µC. Kann man bei solchen Datenraten (oder überhaupt) so einfach wechseln zwischen den Zuordnungen? Problem dabei: Für jeden "Get" zum ADC müsste der Modul-µC Master spielen, für jeden "Get" vom Main-µC aber Slave (und zwar abwechselnd)... 2. Fallen euch gute Alternativen (Schnittstellen, µC Technologien, andere Modelle oder Hersteller z.B. PICs) ein? Ehrlich gesagt: Ich habe so etwas bisher noch nicht gemacht - möchte aber ungern daran scheitern ;)
Angehängte Dateien:
-

overview.PNG
8,5 KB
War die Frage doof, weils so nicht geht?
Alex v. L. schrieb: > War die Frage doof, weils so nicht geht? Wozu sind die "mittleren" µC (Slave/Master) gut? Nur um die Daten abzuholen, zu bündeln und an den Main-µC weiterzureisen?
a) zum abholen b) zur Kontrolle der Hardware auf den Modulen. c) (vielleicht) zur digitalen Filterung (Lock in demodulation zB) d) Zur Bereitstellung einer PWM Referenz... Spielt deine Frage darauf an, dass man die auch einfach weglassen könnte und alles über den Main-µC ansteuern? Darüber hinaus habe ich eben im DB den "USART in SPI Mode" gefunden. Bedeutet das, dass ich mit dem zusätzlich zum nativen SPI ein "zweites" SPI interface aufmachen kann? Dann wäre es ja vielleicht möglich gleichzeitig Slave und Master zu Spielen, je nach Interface...?
Alex v. L. schrieb: > a) zum abholen > b) zur Kontrolle der Hardware auf den Modulen. > c) (vielleicht) zur digitalen Filterung (Lock in demodulation zB) > d) Zur Bereitstellung einer PWM Referenz... > > Spielt deine Frage darauf an, dass man die auch einfach weglassen könnte > und alles über den Main-µC ansteuern? Ja (z. B. über einen ARM-µC). Es stellt sich die Frage, ob das Umschalten (Slave/Master) notwendig ist oder ein µC mit 2 SPI-Schnittstellen besser geeignet ist. Du solltest deine Beschreibung erweitern, so dass man den Aufwand abschätzen kann. - welche Aufgaben die Controller in der höchsten Ausbaustufe haben - die max. Datenraten in die Zweige deines Überblicks einzeichnen
Angehängte Dateien:
-

concept.PNG
21 KB
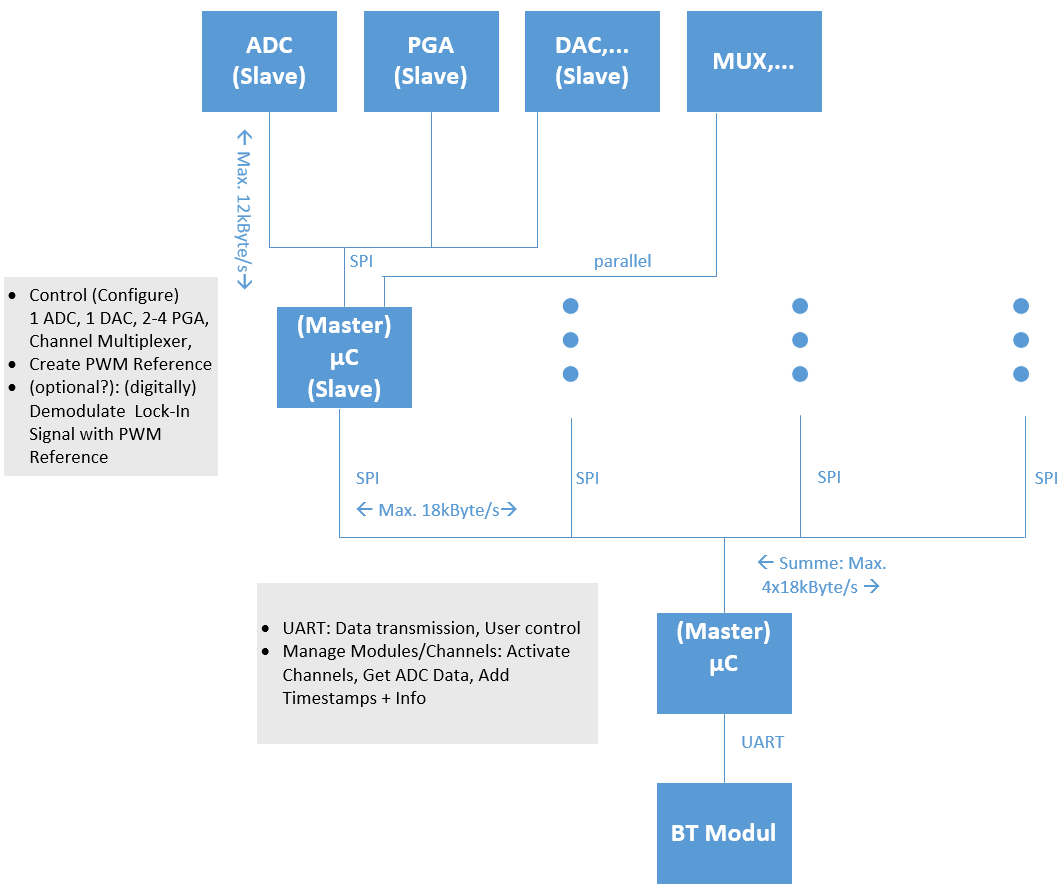
Habe mich bemüht die Übersicht zu erweitern. Pudel schrieb: > Ja (z. B. über einen ARM-µC). Wieso ARM? Weil fixer? Ich ziehe momentan schon auch noch ernsthaft in Betracht alles über einen µC laufen zu lassen. Doof daran ist, dass dann schon einige Lines zu einem Modul laufen müssten (die SPI Data+Clk, min. 4, eher 6 Slave selects, Power, Gnd, ...) und ich die Arbeitslast verteilen wollte. Deshalb aber gerne auch Alternativ-Vorschläge!
Hallo, nur so als Hinweis, die meisten ATmega Controller können den UART alternativ als Master SPI betreiben, so könntest Du, in der mittleren Ebene, die 'echte' SPI-Schnittstelle als Slave betreiben, und die Sensoren (A/D-Wandler, ...) an den als Master-SPI konfigurierten UART hängen, so sparst Du die zeitintensive, und von der Hardware aufwendige, Umschalterei, und hast, auf beiden Seiten, die volle Bandbreite zur Verfügung, dann sollte das auch mit AVRs machbar sein. Mit freundlichem Gruß - Martin
Alex v. L. schrieb: > Ich ziehe momentan schon auch noch ernsthaft in Betracht alles über > einen µC laufen zu lassen. Die Idee finde ich nicht so gut. Von der Geschwindigkeit her wirst du wohl keine Probleme haben, SPI kann beim 644 theoretisch mit 10Mb laufen. Aber die Datenverwaltung und Aufbewahrung könnte zum Problem werden. Andererseits ist ein M644 für 1ADC, 1DAC etc. etwas überdimensioniert. > Deshalb aber gerne auch Alternativ-Vorschläge! Main-µC bleibt, 1 Slave/Master-µC verwaltet SPI Bus (verfügbare Pins voll ausnutzen), 1 Slave-µC verwaltet den Rest (Parallel, I2C, RS485), der kriegt auch eine INT-Leitung zum Main-µC, falls etwas wichtiges über RS485 oder sonstwoher kommt.
> Wieso ARM? Weil fixer? Rechenleistung mit 32-Bit, SPI via DMA, mehr RAM, .... Vorschlag: Die mittlere Ebene rauswerfen und die max. 16 SPI-Slaves an einen ARM-Controller (STM32Fxxx)anschließen. Deine Nettogesamtdatenrate liegt bei 600 KBits/s, was bei einem SPI-Takt von 10 MHz/20 MHz kaum ins Gewicht fällt. Die optionalen Aufgaben (digitale Filterung, solltest du noch näher spezifizieren) übernimmt der ARM.
Alex v. L. schrieb: > Darüber hinaus habe ich eben im DB den "USART in SPI Mode" gefunden. > Bedeutet das, dass ich mit dem zusätzlich zum nativen SPI ein "zweites" > SPI interface aufmachen kann? Dann wäre es ja vielleicht möglich > gleichzeitig Slave und Master zu Spielen, je nach Interface...? Martin Schlüter schrieb: > nur so als Hinweis, die meisten ATmega Controller können den UART > alternativ als Master SPI betreiben, so könntest Du, in der mittleren > Ebene, die 'echte' SPI-Schnittstelle als Slave betreiben, und die > Sensoren (A/D-Wandler, ...) an den als Master-SPI konfigurierten UART > hängen Das beantwortet ja meine Frage ob das ginge, vielen Dank! Marc Vesely schrieb: >> Deshalb aber gerne auch Alternativ-Vorschläge! > Main-µC bleibt, 1 Slave/Master-µC verwaltet SPI Bus (verfügbare Pins > voll ausnutzen), 1 Slave-µC verwaltet den Rest (Parallel, I2C, RS485), > der kriegt auch eine INT-Leitung zum Main-µC, falls etwas wichtiges > über RS485 oder sonstwoher kommt. Danke. Ich habe nur das Anliegen, dass es eine Central Unit und optionale Acquisition units gibt - die bräuchten ja in jedem fall je einen Slave µC. Ich verstehe noc nciht ganz, was der zusätzliche Slave/Maste µC zum Main µC bringen soll? Pudel schrieb: > Die optionalen Aufgaben (digitale Filterung, solltest du > noch näher spezifizieren) Das, was an Processing anstünde ist schnell und leicht beschrieben - wobei ich bei digitaler Lock in Demodulation die Abtastrate von zwei Channeln (und damit die SPI Datenrate) hochkorrigieren muss (s.u.) Also kurz einmal Details zu den ADC Daten, die je nach Konzept eben auf dem Modul vorverarbeitet (gefiltert) werden oder zentral. Modular wäre mir eben lieber: Ein Modul: 6 ADC Channel, 4 davon werden mit 1ksps gelesen, 2 mit bis zu >6ksps (noch nicht klar was nötig/sinnvoll ist). - Die 4 1ksps channel sind oversampled und werden auf je 250sps für besseres SNR gemittelt. Also 4*250*16Bit/s = 2kByte/s+ 1kByte/s package Info auf die SPI lane. - Die 2 6ksps Channel beinhalten je ein 3 kHz PWM moduliertes Signal, das Lock-In demoduliert wird, d.h. pro sample eine +/- 1 Multiplikation. Danach eine digitale 2Hz Tiefpass FIR Filterung ca. 3. Ordnung. Übertragen werden müssen dann nur noch ca. 80*16Bit/s + 80*8Bit Package Info = 240Bytes/s. JEDOCH: Über den UART würde ich die 3,24kBytes/s am liebsten ASCII kodiert schicken. Das wäre also nochmal processing overhead (wie viel kann ich nicht einschätzen) und erhöht die Menge an Daten die in den UART buffer muss. Zusammengefasst sind die haupt Processing aufgaben also: a1) (Lock-In) Filtering: +-1 Multiplikation, 3.order FIR TP a2) Averaging (4 channel von 1ksps oversampled auf je 250 sps) b) Alle Daten ASCII codieren + in den UART Buffer an das BT Modul schieben c) Steuerung der Module (Channel Control)
Nur kurz nochmal zu der 2xSPI Idee (über den optionalen USART SPI): Ich finde das hätte den schönen Beigeschmack, dass die Signalverarbeitung komplett auf den modulen passiert. Gesendet an (beliebige Hardware, in diesem Fall den main µC) müssten nur noch die bereits gemittelten Werte aus dem oversampling (250sps pro channel) und die bereits lock-in demodulierten zwei anderen kanäle (80sps pro channel) + channel jeweilige info packages. Dann wäre auch die funktionale struktur eingehalten: Die module erfassen und verarbeiten die Signale, das mainboard steuert die module, holt sich die signale und kommuniziert mit dem PC.
Alex v. L. schrieb: > Ich verstehe noc nciht ganz, was der zusätzliche Slave/Maste µC zum Main > µC bringen soll? Der soll die ganzen Module die uber SPI kommunizieren, verwalten. Alles, was über SPI läuft, wird da angeschlossen. Warum sollte jeder Modul seinen eigenen µC haben ? Ein ARM kommt mit 4-5 Modulen nicht mal ins schwitzen.
Marc Vesely schrieb: > Warum sollte jeder Modul seinen eigenen µC haben ? Weil dann auf jedem µC jedes Moduls auch die anderen Aufgaben (Filter etc) übernommen werden können und das Modul eine abgeschlossene DAQ einheit wär. Und weil ich dann Leitungen sparen könnte (nur einmal SPI zum Modul + Spannungsversorgung). Ich denke das ganze wäre dann einfacher Skalierbar!
Alex v. L. schrieb: > Weil dann auf jedem µC jedes Moduls auch die anderen Aufgaben (Filter > etc) übernommen werden können und das Modul eine abgeschlossene DAQ > einheit wär. Ein ARM-M4 ist ungefähr um den Faktor 15-30 schneller als M644, in jeder Disziplin. Manches ist bis zu 50-60 Mal schneller. Flash ist 3 Mal so gross, RAM ist 50 Mal so gross... Alex v. L. schrieb: > Und weil ich dann Leitungen sparen könnte (nur einmal SPI zum Modul + > Spannungsversorgung). Warum sollten hier mehr Leitungen vorhanden sein ? Ich liebe meine M328 und Tiny85, benutze die, wo immer nur möglich, aber es gibt Aufgaben, da sind die beiden einfach zu schwach. Genauso ist es bei dir. M644 ist sogar teuerer als ARM, langsamer, hat nicht genug RAM, er ist ganz einfach die schlechtere Wahl. Du kannst es natürlich machen, wie es dir beliebt.
Ich glaube ich bin langsam überzeugt ;) Wenn ich Atmel ARM Implementierungen nehme, kann ich die ja auch über Atmel Studio in C programmieren, so wie es aussieht - d.h. bis auf evtl andere Registernamen müsste für mich ja ansonsten alles beim Alten bleiben. Lassen sich die ARM based AVR controller auch mit meinem ISP mkII programmieren oder brauche ich da einen neuen Programmer? Und: Jetzt habe ich natürlich das Problem, dass ich mich mit der ARM-Reihe noch gar nicht auskenne... Bezüglich Externem Quarz (und Cs) etc. lassen sich die Dinge so handhaben wie bei den AVRs - oder gibt es da viele neue kleine Baustellen? Und danke für die ARM-M4 Empfehlung! Ich schaue mir gerade die Atmel ARM Modelle an (vorallem M4) und muss zugeben: Die stehen ja in keinem Verhältnis zu den AVRs! Meine Sorge nur: Wie viel Umstellung ist es von AVR auf ARM? Gibt es da Kleinheiten und Tücken, die man kennen muss damit das erste Projekt mit ARM kein Desaster wird?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.