Hallo zusammen, ich experimentiere jetzt seit knapp einem Monat mit meinem Attiny herum und hab schon die ein oder anderen kleinen Programme zum laufen gebracht. Jetzt möchte ich gerne eine Rotationsbewegung erfassen. Vielmehr möchte ich die Drehrichtung bestimmen (also Linksdrehung oder Rechtsdrehung). Bisher habe ich dazu zwei dieser Neigungsschalter benutzt: http://www.voelkner.de/products/42221/Neigungsschalter-Hg-Frei.html?frm=reco__related ganz glücklich bin ich damit aber nicht, da es mir doch sehr umständlich erscheint und ich die spätere Schaltung zudem möglichst kompakt haben möchte. Daher meine Frage: hat jemand von euch Erfahrung mit dem Einsatz von Gyroskopen? Falls ja, welche benutzt ihr so und was habt ihr da für Tipps? Evtl. Tutorials? Gerne auch direkt mit Link um sowas mal zu bestellen und etwas damit rumzuprobieren :-) Falls ihr noch eine andere Idee habt die Drehrichtung zu bestimmen, bin ich ganz Ohr. Danke schonmal vorab und Grüße Ruben
Rubencz schrieb: > Falls ihr noch eine andere Idee habt die Drehrichtung zu bestimmen, bin > ich ganz Ohr. Drehrichtung von was? Dreht sich der Sensor und µC mit oder ist der außen?
Hattest du nicht schon vor ein paar Tagen einen Tread zu diesem Thema geführt?
Es ist so gedacht, dass sich alles mitdreht. Mit alles ist der gesamte Schaltaufbau gemeint. Eben alles :D Grüße Ruben
@stefanus ja dabei gings nur um die Implementierung der Neigungsschalter. Ich habe diese dann einfach wie im Tutorial hier auf der Seite als "Schalter/Taster" verwendet um mein Problem zu lösen :) Grüße Ruben
Rubencz schrieb: > Es ist so gedacht, dass sich alles mitdreht. Mit alles ist der gesamte > Schaltaufbau gemeint. Eben alles :D kann man an der Umgebung etwas befestigen? Oder gibt es keine sicht auf die Umgebung (die sich nicht mitdreht) Um welche Achsen kann es sich drehen? 1 oder mehrere?
Moment mal: Hast du wirklich mit der Programmierung begonnen, ohne vorher zu evaluieren, ob und wie diese Schalter für deine Aufgabe geeinget sind? Du bist ja lustig! Was dabei raus kommt ist klar. Peter hat schon begonnen, die gleichen Fragen zu stellen, die schonmal im anderen Thread gefallen waren. Link zum ursprünglichen Thread: Beitrag "Implementierung von Neigungswinkelschalter" Ich schlage vor, diesen Thread hier zu sperren, damit das Thema im ursprünglichen tread fortgesetzt wird.
Rubencz schrieb: > @stefanus ja dabei gings nur um die Implementierung der > Neigungsschalter. Ich habe diese dann einfach wie im Tutorial hier auf > der Seite als "Schalter/Taster" verwendet um mein Problem zu lösen :) Und. Hast du es hingekriegt? Denn eines muss dir klar sein. Neigungsschalter sind um 3 Größenordnungen simpler als ein Gyro. Wenn du es mit Neigungsschaltern nicht hinkriegst, dann wird es mit einem Gyro auch nichts. Denn so ein Gyro löst dir das Problem nicht im Alleingang. Ganz im Gegenteil tut sich eine komplett neue Fallgrube an Problemen auf, die du mit Neigungsschaltern alle nicht hast.
:
Bearbeitet durch User
Angehängte Dateien:
-

Drehrichtung.png
15 KB
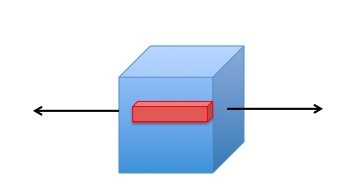
Also gedacht ist das ganze mit Batterie zu betreiben sodass es autonom von außen ist. Also irgendwelche Kabel etc. möchte ich nicht befestigen. Im Anhang mal eine kleine Skizze mit der kompletten Schaltung als Blackbox (blau) und dem Gyroskop (rot) und der Rotationsachse (schwarz) Grüße Ruben
Ja mit den Neigungsschaltern hat es geklappt nach dem Tipp sie einfach als normale "Taster" zu betrachtet. Dass das mit dem Gyro deutlich schwerer ist ist mir bewusst, wieviel schwerer jedoch nicht, deshalb der neue Thread hier, da es im alten ja mehr um die einfachen Neigungsschalter ging. Hoffe das ist in Ordnung. Grüße Ruben
Dann besorge Dir erstmal einen Gyro Sensor (zum Vergleich auch einen 2 oder 3-Achsen Accelerometer) und ein Interface zum PC. Dann kannst du erstmal ganz entspannt am PC ausprobieren, was die Sensoren können und was nicht. Wenn du einen brauchbaren Code auf dem PC entwickelt hast, dann schreib ihn nochmal neu für den Mikrocontroller. So ist das wirklich einfacher, vor allem beim Einstieg.
Ok Danke :) Hast du evtl. einen Tipp für Gyro und Interface? Ich fand es beim µC schon schwer mich zu entscheiden. Also nach Möglichkeit nicht allzu komplex, um wie Karl Heinz schon sagte möglichst wenige potentiell Fehlerquellen zu haben. Danke und Grüße Ruben
Das Hauptproblem bei einem Gyro ist, dass er driftet! D.h. der Gyro meldet dir eine Drehung, wo keine ist. Die große Kunst beim Gyro ist, die realen Daten vom Sensorfehler zu trennen. (Und ich denke mal, die Aussage "3 Größenordnungen schwieriger" trifft es nicht wirklich. Es ist schwieriger)
:
Bearbeitet durch User
Ein Accelerometer hingegen reagiert neben der Beschleunigung auch auf die Erdanziehung. Die driftet nicht. Ich empfehle das BMA020 Modul vom ELV Verlag, sowie irgendeinen USB zu I²C Adapter.
Ok danke für die Tipps. Ich werde mich mal einlesen und falls weitere Fragen kommen dann hier in dem Thread posten. Grüße Ruben
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.