Hallo Leute, in einem Antrieb werden x1, y1,y2 sowie z1,z2 und z3 GEMESSEN. Aus diesen Gemessenen Daten werden dann die Positionen hergeleitet. Nun würde ich einfach nur gerne wissen, wie man auf diese Gleichungen kommt ? Bzw. wie lassen sich die Gleichungen von z1,z2 und z3 verstehen bzw. herleiten ? Eine Antwort wäre ich sehr dankbar. Irgendwie stehe ich auf dem Schlauch...
Angehängte Dateien:
-

Gleichungen.png
33 KB
Das ist vll. eher ein mathematisches Problem, aber wie zum Teufel kommt man auf diese Formeln...
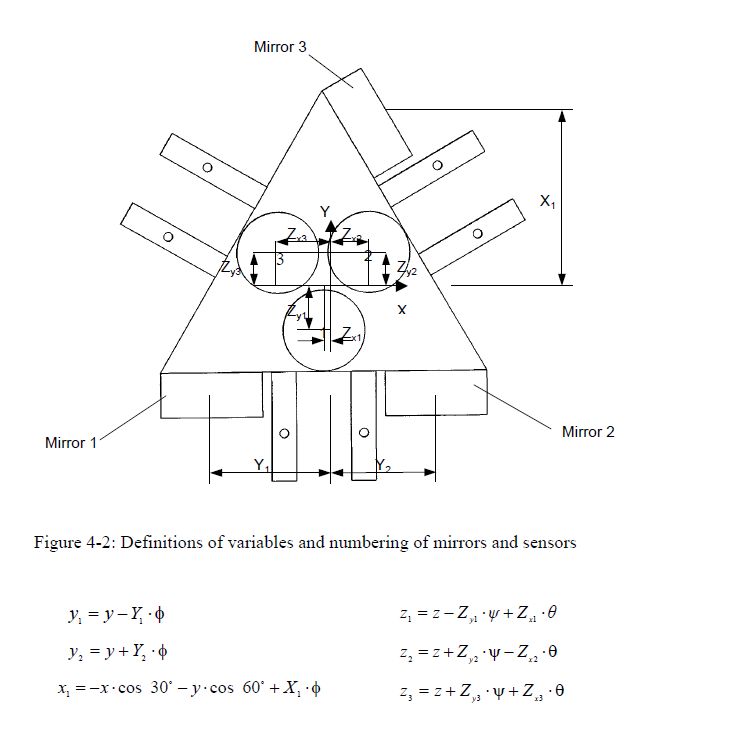
Mit den begrenzten Infos will ich mal vermuten: Phi, Psi und Theta sind die Drehwinkel dieser Struktur um die 3 Achsen x,y,z X,Y,Z sind die Abstände der Spiegel auf der Struktur wie in der Zeichnung x,y,z sind die gemessenen Positionen der Spiegel, diese hängen natürlich von den Drehwinkeln ab Die Gleichungen sind Sinussatz und Kosinussatz, angewendet auf diesen speziellen Fall
Pink Shell schrieb: > Mit den begrenzten Infos will ich mal vermuten: > > Phi, Psi und Theta sind die Drehwinkel dieser Struktur um die 3 Achsen > x,y,z > X,Y,Z sind die Abstände der Spiegel auf der Struktur wie in der > Zeichnung > x,y,z sind die gemessenen Positionen der Spiegel, diese hängen natürlich > von den Drehwinkeln ab > > Die Gleichungen sind Sinussatz und Kosinussatz, angewendet auf diesen > speziellen Fall Phi ist der Winkel um die Z-Achse, Psi der Winkel um die X-Achse und Theta der Winkel um die Y-Achse. x1, y1 und y2 sowie z1, z2 und z3 sind die gemessenen Werte der Sensoren. X1 und Y1 und Y2 sind die Abstände der vom Mittelpunkt und der Oberfläche des Spiegels. Irgendwie stehe ich trotzdem auf dem Schlauch, könntest du mit einer Gleichung nur zeigen, wie man auf diese kommt ?
Pink Shell schrieb: > x,y,z sind die gemessenen Positionen der Spiegel, diese hängen natürlich > von den Drehwinkeln ab Warum hängen die von den Drehwinkeln ab ?
Michael Jennens schrieb: > Aus diesen Gemessenen Daten werden dann die Positionen hergeleitet. Wessen Positionen und bezogen auf was? In der Zeichnung sind Phi, Psi und Theta nicht zu finden.
Wolfgang schrieb: > Michael Jennens schrieb: > Aus diesen Gemessenen Daten werden dann die Positionen hergeleitet. > > Wessen Positionen und bezogen auf was? > In der Zeichnung sind Phi, Psi und Theta nicht zu finden. Ja die Bezeichnungen sind so wie geschrieben ...
Michael jenns schrieb: > Ja die Bezeichnungen sind so wie geschrieben ... Soll das ein Ratespiel sein, bei dem es darum geht, die Achsen in der zu finden?
Wolfgang schrieb: > Michael jenns schrieb: >> Ja die Bezeichnungen sind so wie geschrieben ... > > Soll das ein Ratespiel sein, bei dem es darum geht, die Achsen in der zu > finden? Was ist denn unklar ?
Frederic schrieb: > Was ist denn unklar ? Um ehrlich zu sein: Alles. Es gibt insgesamt 23 Symbole. Davon tauchen folgende sowohl in der Skizze als auch in den Formeln auf: X1, Y1, Y2, Zx1, Zx2, Zx3, Zy1, Zy2, Zy3 Diese sind noch halbwegs klar. Folgende tauchen nur in der Skizze auf: X, Y Sollen das Koordinatenachsen sein? Wenn ja, wodurch ist der Ursprung des Koordinatensystems definiert? Folgende tauchen nur in den Formeln auf: x, y, z, x1, y1, y2, z1, z2, z3, φ, ψ, θ Diese machen die meisten Schwierigkeiten. Was bedeuten all diese Variablen? Warum sind sie in der Skizze nirgends zu sehen? Michael Jennens schrieb: > Phi ist der Winkel um die Z-Achse, Psi der Winkel um die X-Achse und > Theta der Winkel um die Y-Achse. Wo liegt die Z-Achse? Senkrecht zur (vermuteten) X- und Y-Achse? Dann wäre vielleicht eine zweite Skizze hilfreich, die das Gebilde aus einer anderen Perspektive zeigt. Was meinst du mit "Winkel um die Z-Achse"? Es gibt keinen Winkel um eine Gerade, sondern nur Winkel zwischen zwei (Halb-)Geraden, die in der gleichen Ebene liegen: http://de.wikipedia.org/wiki/Winkel Poste doch mal ein Bildchen, wo alle in den Formeln vorkommenden Variablennamen auftauchen, insbesondere auch die Winkel. Vielleicht hilft es auch weiter, wenn du etwas näher erläuterst, worum es sich bei diesem System handelt, was das Dreick und die drei Kreise darstellen, welche Funktion die drei Spiegel haben und was das für Sensoren sind, die die Werte x1, y1 und y2 sowie z1, z2 und z3 messen.
Der gesamte Kontext fehlt. Wir sehen nur ein Fragment. Das ist eine Telbeschreibung einer Konstruktion. Wo ist der Rest der Beschreibung? Das sieht aus wie eine Kopie mitten aus einem Buchtext oder Script heraus.
OK, hier ist der Link, woher ich das Bild habe: Dort ist auch alles näher beschrieben, auf den Seiten 43-46 steht das alles: http://repository.tamu.edu/bitstream/handle/1969.1/118/etd-tamu-2003A-2003032814-Gu-1.pdf?sequence=1 Es handelt sich dabei um eine Abschlussarbeit. Hoffentlich kann mir nun hier einer weiterhelfen.
... klingt für mich nach den üblichen Transformationsgleichungen für Zylinderkoordinaten . http://de.wikipedia.org/wiki/Polarkoordinaten#R.C3.A4umliche_Polarkoordinaten:_Zylinderkoordinaten_und_Kugelkoordinaten
Achim Hensel schrieb: > ... klingt für mich nach den üblichen Transformationsgleichungen > für > Zylinderkoordinaten . > > http://de.wikipedia.org/wiki/Polarkoordinaten#R.C3...
Michael Jennens schrieb: > Achim Hensel schrieb: >> ... klingt für mich nach den üblichen Transformationsgleichungen >> für >> Zylinderkoordinaten . >> >> http://de.wikipedia.org/wiki/Polarkoordinaten#R.C3... Naja, für mich nicht unbedingt....ich hätte, wenn mäglich, gerne mal eine gute erklärung...
Dass auf Sinus und Tangens in den Formeln verzichtet wird, könnte daran liegen, dass die Verdrehwinkel relativ klein sind und es deshalb zwischen Winkelmaß in Radiant und Sinus keinen nennenswerten Unterschied gibt. Den Kosinus kann man gleichzeitig mit Wert 1 annehmen, so dass auch der Tangens (= Sinus/Kosinus) mit dem Winkelmaß gleichgesetzt werden kann.
Hier ist die (relativ ausführliche) Herleitung der Formel für y₂, wo das Prinzip am leichtesten zu erkennen ist. Die allgemeine Abbildungsmatrix für Rotationen in der x-y-Ebene lautet:
(s. http://de.wikipedia.org/wiki/Drehmatrix) Im Ruhezustand liegt der Schwerpunkt der Platte (der in der Arbeit als Bezugspunkt genommen wird) an der Position (0,0) des globalen Koordinatensystems und hat die Orientierung 0. Der Auftreffpunkt des Laserstrahls auf den Spiegel 2 hat dann die Koordinaten (Y₂,-d), wobei d der (positiv gerechnete) Abstand des Auftreffpunkts vom Schwerpunkt in y-Richtung ist. Jetzt wird die Platte um den Winkel ϕ um die vertikale Achse gedreht. Der Auftreffpunkt liegt nun an der Position
Dann wird die Platte um y in Richtung der y-Achse verschoben. Der Auftreffpunkt liegt jetzt an der Position
Relativ zur Ruhelage hat sich der Auftreffpunkt also um
bewegt. Das Interferometer misst die y-Komponente dieser Relativbewegung, die da wäre:
Mit den Näherungen sin ϕ ≈ ϕ und cos ϕ ≈ 1 (für |ϕ| << 1) ergibt sich
Die Berechnung von y₁, z₁, z₂ und z₃ verläuft entsprechend. Wenn du erst einmal das Gefühl für diese Drehungen um kleine Winkel entwickelt hast, wirst du nicht mehr mit Rotationsmatrizen herumrechnen, sondern die Näherungsformel direkt hinschreiben. Bei der Berechnung von x₁ muss zusätzlich berücksichtigt werden, dass die Messrichtung des Interfermeters nicht parallel zur x-Achse, sondern in einem Winkel 30° dazu verläuft. Deswegen geht nicht nur die x-Bewegung der Platte in den Messwert ein, sondern die x-Bewegung mit einem Anteil von cos 30° und die y-Bewegung mit einem Anteil von sin 30° (= cos 30°). X₁ ist in der Skizze übrigens falsch eingezeichnet. X₁ sollte der Abstand des Auftreffpunkts auf Spiegel 3 vom Schwerpunkt der Platte in Richtung der Spiegelfläche (und nicht der y-Achse) sein, damit die Formel stimmt.
:
Bearbeitet durch Moderator
Yalu X. schrieb: > Hier ist die (relativ ausführliche) Herleitung der Formel für y₂, wo das > Prinzip am leichtesten zu erkennen ist. Vielen vielen lieben Dank Yalu X. ! Das ist doch endlich mal super, eine Lösung zu erhalten. Ich probiere gleich die anderen Gleichungen aus. Das ist echt super, ich freu mich =) !
Yalu X. schrieb: > Dann wird die Platte um y in Richtung der y-Achse verschoben. Der > Auftreffpunkt liegt jetzt an der Position Bezieht sich die Aussage aber noch auf das globale KOS ? Weil wenn sich das Ursprungskoordinatensystem nun um einen Winkel dreht, so drehen ja auch die x- und y-Achse sich um diesen Winkel. Die Bewegung auf der Y-Achse des NEUEN gedrehten KOS würde aber eine X- und Y- Komponente im globalen KOS haben, oder ? Yalu X. schrieb: > Relativ zur Ruhelage hat sich der Auftreffpunkt also um Das ist letztlich nur das DELTA, sprich, die Differenz zwischen Anfangs- und Endwert, ne ?
Michael Jennens schrieb: >> Dann wird die Platte um y in Richtung der y-Achse verschoben. Der >> Auftreffpunkt liegt jetzt an der Position > > Bezieht sich die Aussage aber noch auf das globale KOS ? Ja. > Weil wenn sich das Ursprungskoordinatensystem nun um einen Winkel dreht, > so drehen ja auch die x- und y-Achse sich um diesen Winkel. Die Bewegung > auf der Y-Achse des NEUEN gedrehten KOS würde aber eine X- und Y- > Komponente im globalen KOS haben, oder ? Die Koordinaten des Auftreffpunkts in meinem Beitrag beziehen sich immer auf das globale (stationäre) Koordinatensystem, in dem auch das Interferometer eine feste Position und Orientierung hat. Nur die Platte bewegt sich, aber das plattenlokale Koordinatensystem habe ich nirgends verwendet. >> Relativ zur Ruhelage hat sich der Auftreffpunkt also um > > Das ist letztlich nur das DELTA, sprich, die Differenz zwischen Anfangs- > und Endwert, ne ? Genau. Das Interferometer misst ja keine absoluten Distanzen, sondern Distanzänderungen. Der Distanzwert wird bei der Initialisierung des Systems (wo, die Platte vermutlich in Ruhelage ist) auf Null gesetzt, danach werden die Distanzen durch Aufwärts- bzw. Abwärtszählen der Wellen im Interferenzmuster relativ zu dieser Nullposition bestimmt.
Vielen Dank für die Antwort. Hat mir echt super geholfen. Eine Frage noch: Was wäre, wenn man davon ausgehen würde, dass es zu überhaupt keiner Drehung kommen würde, dann bräuchte man auch keine Drehmatrix, oder ? Irgendwie stehe ich leicht auf den schlauch, mir ist nicht ganz klar, wozu ich die Transformation bzw. die Drehmatrix brauche...
Michael Jennens schrieb: > Vielen Dank für die Antwort. Hat mir echt super geholfen. > > Eine Frage noch: > Was wäre, wenn man davon ausgehen würde, dass es zu überhaupt keiner > Drehung kommen würde, dann bräuchte man auch keine Drehmatrix, oder ? > > Irgendwie stehe ich leicht auf den schlauch, mir ist nicht ganz klar, > wozu ich die Transformation bzw. die Drehmatrix brauche... Ich mein, wenn wir uns mal das Bild anschauen: http://zone.ni.com/images/reference/de-XX/help/371361J-0113/loc_eps_2dcartrot.gif Nehmen wir an, dass das X/Y-KOS das globale System ist. Nun dreht sich das KOS um ein Winkel Theta, dass nun X' und Y' genannt wird. Wir haben den Punkt P, im globalen KOS, wozu brauchen wir da die Transformation ?
Michael Jennens schrieb: > Michael Jennens schrieb: >> Vielen Dank für die Antwort. Hat mir echt super geholfen. >> >> Eine Frage noch: >> Was wäre, wenn man davon ausgehen würde, dass es zu überhaupt keiner >> Drehung kommen würde, dann bräuchte man auch keine Drehmatrix, oder ? >> >> Irgendwie stehe ich leicht auf den schlauch, mir ist nicht ganz klar, >> wozu ich die Transformation bzw. die Drehmatrix brauche... > > Ich mein, > > wenn wir uns mal das Bild anschauen: > > http://zone.ni.com/images/reference/de-XX/help/371... > > Nehmen wir an, dass das X/Y-KOS das globale System ist. > > Nun dreht sich das KOS um ein Winkel Theta, dass nun X' und Y' genannt > wird. > > Wir haben den Punkt P, im globalen KOS, wozu brauchen wir da die > Transformation ? Anders ausgdrückt: Ist das globale KOS fest ? Oder bewegt es sich mit der Platte ? Wenn ja, dann habe ich verstanden, weshalb wir die Transformation benötigen, jedoch ist mir dann nicht ganz klar: Aus Sicht des Beobachters von außen bewegt sich die Platte sowohl in X- als auch in Y- Richtung, aussicht des Mittelpunktes der Platte nur in Y-Richtung, da das globale System sich ebenfalls mitgedreht hat...
Michael Jennens schrieb: > Was wäre, wenn man davon ausgehen würde, dass es zu überhaupt keiner > Drehung kommen würde, dann bräuchte man auch keine Drehmatrix, oder ? Wenn sich die Platte nicht dreht, brauchst du die Drehung logischerweise nicht zu berücksichtigen und damit kommen auch keine Drehmatrizen ins Spiel. Dann könntest du auch eines der Interferometer und zwei der kapazitiven Distanzsensoren einsparen, da drei der Freiheitsgradsgrade wegfallen. Michael Jennens schrieb: > Ist das globale KOS fest ? Ja. Ich meine, ich hätte das oben schon geschrieben. > Oder bewegt es sich mit der Platte ? Nein. Das globale Koordinatensystem ist sozusagen am Tisch fixiert, auf der der ganze Aufbau steht. Die Messwerte der einzelnen Sensoren hängen aber nicht nur von der Translation, sondern auch von der Rotation der Platte ab. Deswegen braucht man zu deren Berechnung die Drehmatrizen.
Yalu X. schrieb: > Das globale Koordinatensystem ist sozusagen am Tisch fixiert, auf der > der ganze Aufbau steht. Ok, d.h. das globale KOS ist fest verbunden, der Schwerpunkt der Platte ist bei Beginn zunächst im Ursprung des globalen KOS, richtig ? > Die Messwerte der einzelnen Sensoren hängen aber nicht nur von der > Translation, sondern auch von der Rotation der Platte ab. Deswegen > braucht man zu deren Berechnung die Drehmatrizen. Das versteh ich einfach nicht ganz, irgendwie will das nicht in mein Kopf rein....
Gibts irgendwelche Begriffe oder Bücher, wo ich das auch nachlesen kann ? Begriffe, die ich googlen kann ? Drehmatrix, sowohl mathematisch als auch begrifflich ist mir ein Begriff...
Michael Jennens schrieb: >> Die Messwerte der einzelnen Sensoren hängen aber nicht nur von der >> Translation, sondern auch von der Rotation der Platte ab. Deswegen >> braucht man zu deren Berechnung die Drehmatrizen. > > Das versteh ich einfach nicht ganz, irgendwie will das nicht in mein > Kopf rein.... Das ist doch ganz einfach: Wenn du die Platte im Gegenuhrzeigersinn um ihren Schwerpunkt drehst, ohne diesen dabei zu verschieben, wird sich der Spiegel 1 auf das zugehörige Interferometer zu bewegen, d.h. der gemessene Abstand wird kleiner. Bei den Spiegeln 2 und 3 ist es genau andersherum. Michael Jennens schrieb: > Gibts irgendwelche Begriffe oder Bücher, wo ich das auch nachlesen kann > ? Weiß nicht, das Thema kann eigentlich mit dem Schulstoff aus der 9./10. Klasse und etwas gesundem Menschenverstand erschlagen werden. Dort werden zwar keine Drehmatrizen behandelt, aber die Formeln für die Drehung lassen sich mit etwas Trigonometrie leicht selber herleiten.
Yalu X. schrieb: > Dann wird die Platte um y in Richtung der y-Achse verschoben. Der > Auftreffpunkt liegt jetzt an der Position ich habe es soweit verstanden, hatte einen Hänger bzgl. der Drehmatrix, oh man, ist klar soweit eig. Aber eine Frage: Bei der Aussage handelt es sich um die Überlagerung, zuerst wird die Platte um einen Winkel gedreht, und diese gedrehte platte wandert nun um y weiter, hab ich das richtig verstanden ?
Yalu X. schrieb: > Bei der Berechnung von x₁ muss zusätzlich berücksichtigt werden, dass > die Messrichtung des Interfermeters nicht parallel zur x-Achse, sondern > in einem Winkel 30° dazu verläuft. Deswegen geht nicht nur die > x-Bewegung der Platte in den Messwert ein, sondern die x-Bewegung mit > einem Anteil von cos 30° und die y-Bewegung mit einem Anteil von sin 30° > (= cos 30°). X₁ ist in der Skizze übrigens falsch eingezeichnet. X₁ > sollte der Abstand des Auftreffpunkts auf Spiegel 3 vom Schwerpunkt der > Platte in Richtung der Spiegelfläche (und nicht der y-Achse) sein, damit > die Formel stimmt. Lieber Yalu X., zunächst einmal vielen lieben Dank, dass du dir die Zeit genommen hattest und mir geholfen hast ! Das hat mich schon erheblich weiter gebracht. Dennoch habe ich für mein Verständniss noch paar Fragen, vll. kannst du Sie mir auch noch beantworten: Handelt es sich bei der Formel, die unter der Aussage steht, um eine Überlgaerung letztlich ? > Dann wird die Platte um y in Richtung der y-Achse verschoben. Der > Auftreffpunkt liegt jetzt an der Position zuerst wird die Platte um einen Winkel gedreht, und diese gedrehte platte wandert nun um y weiter, hab ich das richtig verstanden ? Weiterhin würde ich gerne wissen, woher die 30 Grad bei dem ersten Zitat kommen ? Hat er das festgelegt durch Messung ? Oder sieht man das irgendwie ? Drittens würde ich gerne wissen, wie man generell vorgeht, wenn man die 6 Koordinaten messen möchte, für jeden Freiheitsgrad benötigt man ein Sensor, richtig ? Aus Gleichungen lassen Sich dann die 6 Koordinaten herleiten, ähnlich wie er es gemacht hatte. Ich versuche die andere Gleichungen auch mal herzuleiten, die ersten zwei sind ja identisch, mal schauen, ob ich die nächsten 4 hinbekomme.... Vielen Dank...
Yalu X. schrieb: > Bei der Berechnung von x₁ muss zusätzlich berücksichtigt werden, dass > die Messrichtung des Interfermeters nicht parallel zur x-Achse, sondern > in einem Winkel 30° dazu verläuft. Deswegen geht nicht nur die > x-Bewegung der Platte in den Messwert ein, sondern die x-Bewegung mit > einem Anteil von cos 30° und die y-Bewegung mit einem Anteil von sin 30° > (= cos 30°). X₁ ist in der Skizze übrigens falsch eingezeichnet. X₁ > sollte der Abstand des Auftreffpunkts auf Spiegel 3 vom Schwerpunkt der > Platte in Richtung der Spiegelfläche (und nicht der y-Achse) sein, damit > die Formel stimmt. Ich probiere tue und mache, komme aber nicht auf das Ergebniss... Woher kommen die 30 Grad und warum sind die Komponenten negativ ? Das andere konnte ich mittlerweile nachvollziehen...
Michael Jennens schrieb: > Yalu X. schrieb: >> Bei der Berechnung von x₁ muss zusätzlich berücksichtigt werden, dass >> die Messrichtung des Interfermeters nicht parallel zur x-Achse, sondern >> in einem Winkel 30° dazu verläuft. Deswegen geht nicht nur die >> x-Bewegung der Platte in den Messwert ein, sondern die x-Bewegung mit >> einem Anteil von cos 30° und die y-Bewegung mit einem Anteil von sin 30° >> (= cos 30°). X₁ ist in der Skizze übrigens falsch eingezeichnet. X₁ >> sollte der Abstand des Auftreffpunkts auf Spiegel 3 vom Schwerpunkt der >> Platte in Richtung der Spiegelfläche (und nicht der y-Achse) sein, damit >> die Formel stimmt. > Bei Y2 lauteten die Anfgangskoordinten Y2 und -d, wie lauten die Anfangskoordinaten bei Mirror 3 ?
Michael Jennens schrieb: > zuerst wird die > Platte um einen Winkel gedreht, und diese gedrehte platte wandert nun um > y weiter, hab ich das richtig verstanden ? Eigentlich ist die zeitliche Reihenfolge egal für das Endergebnis. Wichtig ist, dass bei "Drehung, dann Verschiebung" der Drehpunkt gleichzeitig der Koordinatenursprung ist, dagegen bei "Verschiebung, dann Drehung" noch mitgerechnet werden muss, dass der Drehpunkt dann nicht der Koordinatenursprung ist. Kann man auch machen, ist aber mathematisch viel aufwändiger und führt zum gleichen Ergebnis. Michael Jennens schrieb: > Woher kommen die 30 Grad und warum sind die Komponenten negativ ? Hm, ich tippe mal: Gleichseitiges Dreieck - 60° Innenwinkel - also 90°-60°=30° zur Horizontalen. Wenn die Koordinatenachse nach oben, rechts, hinten zeigt, sind diese Richtungen positiv, die anderen (unten, linke, vorne) negativ. Der Rest ist eigentlich das, was ein Physik-Dozent als "straight forward calculations" bezeichnete -- was sich aber über viele Papierseiten hinziehen kann. Anders ausgedrück: eine simple, aber langwierige Arbeit, bei der man aber genau aufpassen muss.
Achim Hensel schrieb: > Wenn die Koordinatenachse nach oben, rechts, hinten zeigt, sind diese > Richtungen positiv, die anderen (unten, linke, vorne) negativ. Danke zunächst für die Antwort. Ist schon richtig, nur konkret an diesem Beispiel ist für mich nicht ersichtlich, warum das negativ ist?!
@ Yalu, kannst du mir nicht noch mal bei der einen Gleichung nur noch helfen mit dem 30 Grad Sinus- und Cosinus Anteil?
Patrick schrieb: > @ Yalu, kannst du mir nicht noch mal bei der einen Gleichung nur noch > helfen mit dem 30 Grad Sinus- und Cosinus Anteil? Wie oft willst du noch Fragen ? Anscheinend hilft er dir nicht ...
Patrick schrieb: > @ Yalu, kannst du mir nicht noch mal bei der einen Gleichung nur noch > helfen mit dem 30 Grad Sinus- und Cosinus Anteil? Wieso heißt du jetzt plötzlich Patrick? Patrick schrieb: > Wie oft willst du noch Fragen ? Anscheinend hilft er dir nicht ... Führst du jetzt schon Selbstgespräche? Dann muss es ja besonders schlimm um dich bestellt sein ;-) Betrachte doch erst einmal die x- und die y-Bewegung getrennt voneinander: Wie ändert sich der Messwert von Interferometer 3, wenn du die Platte um bspw. 1 cm in x-Richtung bewegst? Und wie sieht es bei einer Bewegung in y-Richtung aus? Mach dir eine Skizze dazu, in die du die Spiegelposition jeweils vor und nach der Bewegung einzeichnest. Dann siehst du ziemlich schnell, wohin der Hase läuft. Außerdem kannst du dann das Ergebnis mit dem Lineal ausmessen und damit die Formel auf Richtigkeit prüfen.
Yalu X. schrieb: > Betrachte doch erst einmal die x- und die y-Bewegung getrennt > voneinander: Wie ändert sich der Messwert von Interferometer 3, wenn du > die Platte um bspw. 1 cm in x-Richtung bewegst? Und wie sieht es bei > einer Bewegung in y-Richtung aus? > > Mach dir eine Skizze dazu, in die du die Spiegelposition jeweils vor und > nach der Bewegung einzeichnest. Dann siehst du ziemlich schnell, wohin > der Hase läuft. Außerdem kannst du dann das Ergebnis mit dem Lineal > ausmessen und damit die Formel auf Richtigkeit prüfen. Gemacht, und auch verstanden, ich betrachte alle Bewegungungen einzeln und überlagere anschließend (sofern das hoffentlich korrekt ist), nur zwei Fragen, die ich bitte von dir beantwortet bekomme: Wieso bekomme ich ein positives x und y, wohingegen er ein negatives hat ? Und wie klappt das hier mit der Anwendung der Drehmatrix ? Wie lauten die Anfangskoordinaten hier ? Bei Mirror 1 und 2 hatten wir ja gesagt gehabt, dass das d und Y2 sind, ist es vll. möglich bitte nur einen kurzen Rechenweg ? DU würdest mir echt helfen...
Yalu X. schrieb: > Patrick schrieb: >> @ Yalu, kannst du mir nicht noch mal bei der einen Gleichung nur noch >> helfen mit dem 30 Grad Sinus- und Cosinus Anteil? Weil wir zu zweit sind und ein Problem haben ;(
Angehängte Dateien:
-

X.png
46 KB
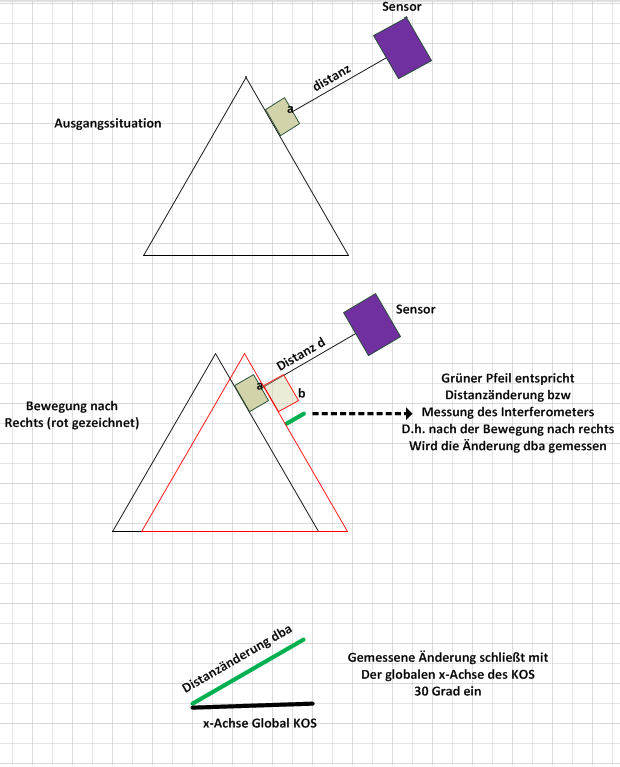
Lieber Yalu, ich habe eine Skizze für den einzigen Fall der Bewegung nach Rechts (in Richtung x-Achse )erstellt. Zunächst haben wir die Ausgangssituation. Zwischen dem Sensor und dem Spiegel herscht die Distant d_a. Nun wird die Platte nach rechts bewegt, der Sensor misst nun die Distanz db. Die Differenz zwischen d_a und d_b bezeichnen wir als d_ba. Diese Differenz schließt mit der x-Achse des globalen KOS einen Winkel von 30 Grad ein, richtig ? Und hier hapert es grad etwas, da ich nicht genau weiß, wie der auf die (MINUS) -x*cos(30) kommt, wahrscheinlich ist das lächerlicher Kosinussatz, aber irgendwie stehen wir auf dem schlauch, hoffentlich kannst du uns mal da weite helfen....
Angehängte Dateien:
-

x-verschiebung.png
18 KB
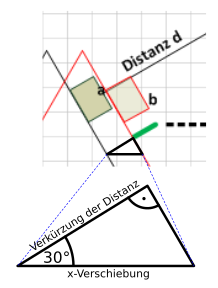
Geht doch (zumindest fast). Michael Jennens schrieb: > Diese Differenz schließt mit der x-Achse des globalen KOS einen Winkel > von 30 Grad ein, richtig ? Richtig. Da der Spiegel parallel zur rechten Seite des gleichseitigen Dreiecks liegt, schließt er mit der y-Achse einen Winkel von 30° ein. Der Strahl trifft senkrecht auf den Spiegel, und die x-Achse steht senkrecht auf der y-Achse, somit schließen Strahl und x-Achse ebenfalls einen Winkel von 30° ein. > Und hier hapert es grad etwas, da ich nicht genau weiß, wie der auf die > (MINUS) -x*cos(30) kommt, wahrscheinlich ist das lächerlicher > Kosinussatz, aber irgendwie stehen wir auf dem schlauch, hoffentlich > kannst du uns mal da weite helfen.... Im rechtwinkligen Dreieck (s. Anhang) gilt: cos(Winkel) = Ankathete / Hypothenuse Das negative Vorzeichen in der Formel kommt daher, dass eine Bewegung der Platte in positiver x-Richtung (also nach rechts) eine Verkürzung (also ein negatives Delta) des Messwerts von Interferometer 3 bewirkt.
Angehängte Dateien:
-

x1.png
2,8 KB
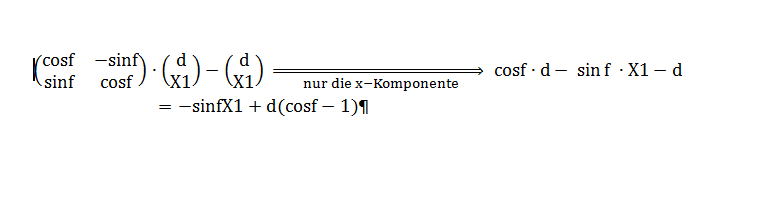
Yalu X. schrieb: > Das negative Vorzeichen in der Formel kommt daher, dass eine Bewegung > der Platte in positiver x-Richtung (also nach rechts) eine Verkürzung > (also ein negatives Delta) des Messwerts von Interferometer 3 bewirkt Endlich, macht auch Sinn ! Darauf kam ich dummerweiße nicht ! Dankeeeee!!!!!!!!! Wie sieht es nun mit der Drehung aus ? Ich habe folgendes angenommen: Drehmatrix mal Anfangskoordinaten des Spiegels minus Anfangskoordinaten des Spiegels, komme jedoch auch auf ein Minus. Ich glaube aber, das korrekte Ergebnis bzw. der korrekte Weg wäre folgender: Distanzänderung = - d = -(x*cos30 + y*sin 30 -f*X1) Damit würde man auf das korrekte Ergebniss kommen, ist das richtig, oder denke ich falsch und ist es falsch, führt jedoch (in Ausnahme) zu richtigen Ergebniss?
Angehängte Dateien:
-

drehung.png
75 KB
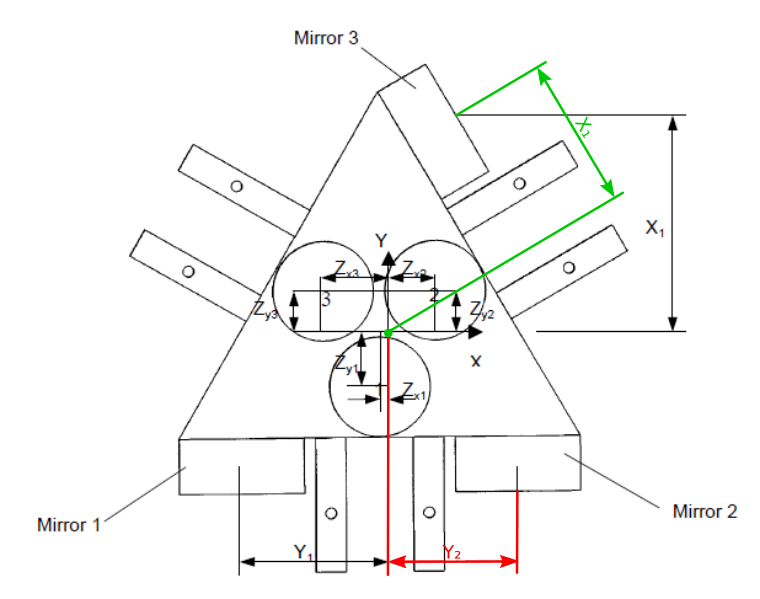
Michael Jennens schrieb: > Wie sieht es nun mit der Drehung aus ? Bei Spiegel 3 passiert genau dasselbe wie bei Spiegel 2, nur um 120° verdreht, was aber dem Interferometer 3 egal ist, da es ja ebenfalls um 120° gedreht ist. Das, was für Spiegel2 X₂ ist, ist für Spiegel 3 X₁ (Dass X₁ in der Originalskizze falsch eingezeichnet ist, habe ich ja schon geschrieben). Alles andere bleibt gleich. Somit muss zum Egrebnis der Verschiebung einfach nur noch X₁·ϕ hinzuaddiert werden.
Yalu X. schrieb: > Michael Jennens schrieb: >> Wie sieht es nun mit der Drehung aus ? > > Bei Spiegel 3 passiert genau dasselbe wie bei Spiegel 2, nur um 120° > verdreht, was aber dem Interferometer 3 egal ist, da es ja ebenfalls um > 120° gedreht ist. Das, was für Spiegel2 X₂ ist, ist für Spiegel 3 X₁ > (Dass X₁ in der Originalskizze falsch eingezeichnet ist, habe ich ja > schon geschrieben). Alles andere bleibt gleich. Somit muss zum Egrebnis > der Verschiebung einfach nur noch X₁·ϕ hinzuaddiert werden. Ach wenn ich mich nur bedanken könnte =) ! Aber war mein Ansatz also falsch ?
Yalu, eine Frage haben wir noch : Wie sieht es aus mit den Koordinaten mit z ? Da messen die kapazitiven Sensoren in z-Richtung. Wende ich da ebenfalls die Drehmatrix an ? Auch seperat ? Kannst du uns da paar Tips geben, wie man auf die Lösung kommt. Bis jetzt hast du uns wirklich super geholfen ! 1000000 Dank !
Angehängte Dateien:
-

Z.png
13 KB
{kind=link}
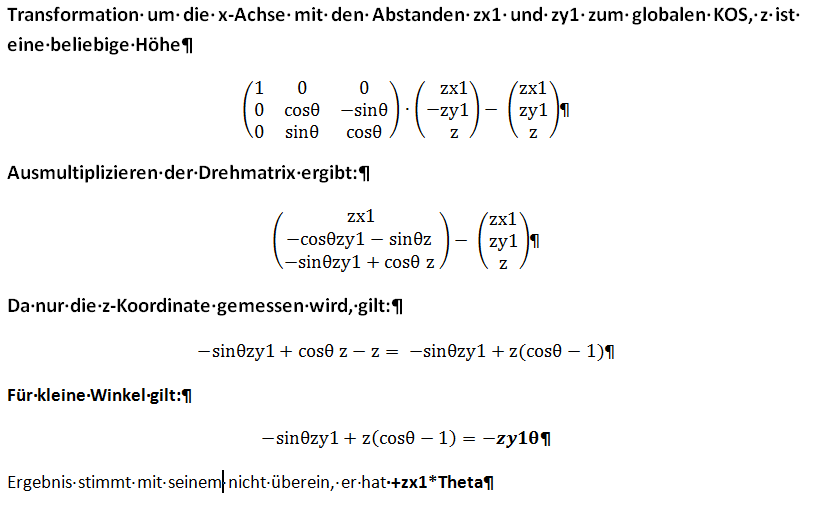
Michael Jennens schrieb: > Yalu, eine Frage haben wir noch : > > Wie sieht es aus mit den Koordinaten mit z ? > > Da messen die kapazitiven Sensoren in z-Richtung. > > Wende ich da ebenfalls die Drehmatrix an ? Auch seperat ? Kannst du uns > da paar Tips geben, wie man auf die Lösung kommt. > > Bis jetzt hast du uns wirklich super geholfen ! > > 1000000 Dank ! Also ich habe es mal probiert für den SENSOR 1 mit der Drehmatrix über der x-Achse, ist mein Ansatz richtig ? Er bekommt ein anderes Ergebnis raus, eig. hab ich deine Erklärung zu y2 exakt übernommen, wobei ich jedoch nur die Drehung um die x-Achse beachtet habe.
Michael Jennens schrieb: > Michael Jennens schrieb: >> Yalu, eine Frage haben wir noch : >> >> Wie sieht es aus mit den Koordinaten mit z ? >> >> Da messen die kapazitiven Sensoren in z-Richtung. k ! > > Also ich habe es mal probiert für den SENSOR 1 mit der Drehmatrix über > der x-Achse, ist mein Ansatz richtig ? > > Er bekommt ein anderes Ergebnis raus, eig. hab ich deine Erklärung zu y2 > exakt übernommen, wobei ich jedoch nur die Drehung um die x-Achse > beachtet habe. Ein Tipp wäre auch gold wert ....
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.