Hallo zusammen Ich habe mir vor einiger Zeit ein Telemetriesystem für Modellflieger gebaut, um unter anderem Höhe zu messen, und daraus die Steig- und Sinkrate (Vario) zu bestimmen. Als Sensor ist ein BMP085 zum Einsatz gekommen, für die Höhe völlig ausreichend, nur eben für den Variowert total ungenügend... Deshalb bin ich nun auf der Suche nach einem besseren Sensor. Es sollte ein Resultat wie beim Picolario erreicht werden: https://www.youtube.com/watch?v=LADTbhQSIHk Weis jemand was da für ein Sensor verbaut ist ? Habe den MPL3115A2 bereits angeschaut, jedoch ist die Auflösung mit 0.3m zu grob. Auch andere Sensoren sind etwa ähnlich. Für einen Tipp wäre ich euch dankbar.
Michael L. schrieb: > Weis jemand was da für ein Sensor verbaut ist ? Habe den MPL3115A2 > bereits angeschaut, jedoch ist die Auflösung mit 0.3m zu grob. Auch > andere Sensoren sind etwa ähnlich. 0.3m zu grob? Viel genauer bekommst du das über den Luftdruck nicht hin. Den MPL3115 setze ich in meinen M-Link Varios auch ein, nach dem der BMP180 nicht mehr so gut zu bekommen ist. Der MS5611 sollte noch etwas besser sein. Ist auch deutlich teurer.
:
Bearbeitet durch User
Angehängte Dateien:
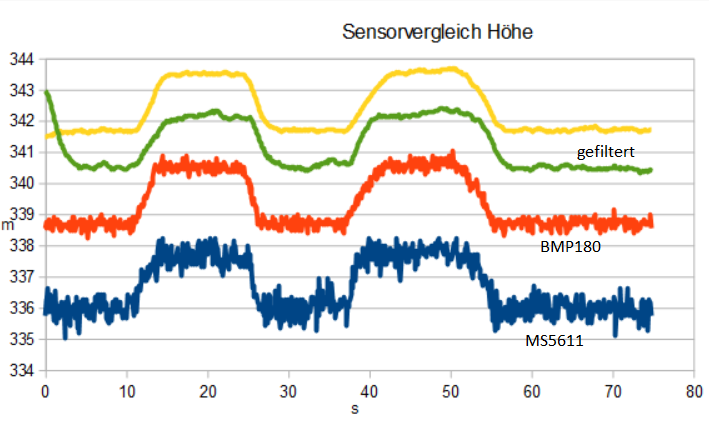
Cyblord ---- schrieb: > Der MS5611 sollte noch etwas besser sein. Ist auch deutlich teurer. Ist er. Ich habe hier beide parallel laufen und beim MS5611 ist das Rauschen etwa einen Faktor 2 kleiner als beim BMP180. Für ein Variometer muss man in jedem Fall vernünftig filtern ;-)
Angehängte Dateien:

Jetzt ist die Sensorzuordnung richtig, sorry.
Ntuerlich kriegt man's genauer hin. Ein ueblicher 5V Sensor mit linear Ausgang, mit 16 Bit gesampelt bringt 10cm Aufloesung pro bit. Das sollte fuer ein Vario genuegen.
@Wolfgang Besten Dank für die Grafik. Thema Filter: bis jetz habe ich die Filterung mit Mittelwertbildung über 1s realisiert, Nachteil: der Variowert wird dann immer verzögert ausgegeben. Wie genau machst Du die Filterung ? Gibt es eine Lösung, damit es möglichst keine Verzögerung gibt ?
Cyblord ---- schrieb: > 0.3m zu grob? Viel genauer bekommst du das über den Luftdruck nicht hin. > Den MPL3115 setze ich in meinen M-Link Varios auch ein Aha ok, hast Du dann so ein Resultat wie oben im Video ?
Hi Michael, Michael L. schrieb: > Gibt es eine Lösung, damit es möglichst keine Verzögerung > gibt ? Nein, das kann es nicht geben. Alle Filter müssen bzw. können immer nur vergangene Werten in die Berechnung einbeziehen, und das bedeutet nun mal Verzögerung. Das lässt sich nur vermeiden, wenn man in die Zukunft sehen kann... Grüße, Uwe
Angehängte Dateien:
-

Filter_MS5611_BMP180.png
130 KB
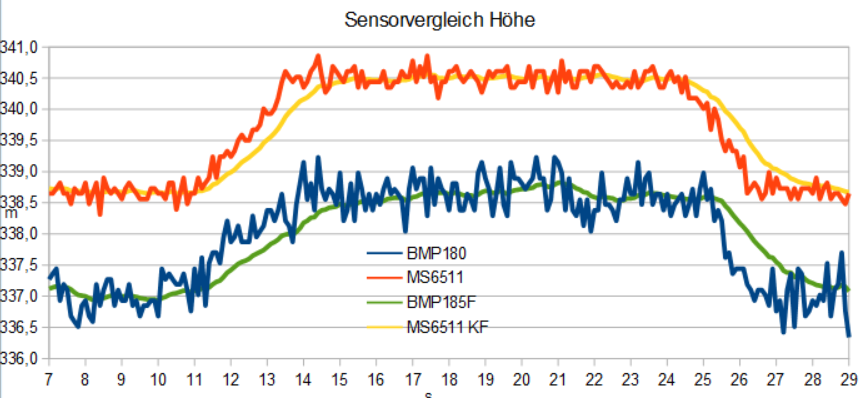
Siebzehn Für Fuenfzehn schrieb: > Ein ueblicher 5V Sensor mit linear > Ausgang, mit 16 Bit gesampelt bringt 10cm Aufloesung pro bit. Dann erzähl mal, welchen du da empfehlen kannst, ohne dass die Zeitauflösung leidet. Der MS5611 verwendet übrigens intern einen 24-Bit Wandler. Michael L. schrieb: > Wie genau machst Du die Filterung ? Ich lese den Sensor alle 100ms aus und habe dann ein Kalman-Filter für die Höhe laufen. Als Anhang noch mal einen Ausschnitt ohne Offset aus den Daten, so dass man die Zeitverschiebung besser sieht. > Gibt es eine Lösung, damit es möglichst keine Verzögerung gibt ? Dafür müßte man in die Zukunft sehen. Ich arbeite gerade noch dran ;-)
Was spricht denn dagegen, mit ein paar mehr Bits zu sampeln ?
Siebzehn Für Fuenfzehn schrieb: > Was spricht denn dagegen, mit ein paar mehr Bits zu sampeln ? Was soll das bringen, wenn das SNR der Daten nicht besser ist.
Die Bits bringen die Aufloesung, das Filtern macht das Rauschen weg. Davon ausgehend, dass innerhalb 100ms (kommt auf den Flieger an) sowieso nichts geschieht, kann man somit mit 0.1Hz filtern. Dann sollte man sich irgendwie einmal eine Referenz schaffen. Und die ist sicher nicht einfach die oberste Wohnung im benachbarten Hochhaus. Allenfalls bei Windstill. Stroemungsverhaeltnisse in Staedten bei Wind sind zu komplex um einfach eine Messung zu machen. Nicht alles was als Rauschen erscheint muss Rauschen sein.
Siebzehn Für Fuenfzehn schrieb: > ... sowieso nichts geschieht, kann man somit mit 0.1Hz filtern. Du bist noch nie geflogen, oder? Mit einem Variometer wird die Änderung der Höhe gemessen und interessieren tut einen dabei u.A. die Änderung der Änderung, um z.B. einen Thermikbart zu erkennen und zu zentrieren. Bei einem 0.1Hz Filter ist man schon lange durchgeflogen, bevor die Anzeige überhaupt reagiert.
Die Samples liesst man kontinuierlich zB alle ms aus und laesst einen Tiefpass drueber, Programmiertechnisch ist das dann ein exponentieller Mittelwert. Siehe dazu auch http://www.ibrtses.com/embedded/exponential.html Sofern das Rauschen auch Rauschen ist, und der Sensor die Bandbreite besitzt, wird das Rauschen mit der Wurzel der Samples verkleinert.
Siebzehn Für Fuenfzehn schrieb: > Ich flog Gleitschirm ... ... und da reicht dir ein Variometer mit 0.1Hz Tiefpaßfilter? Für kleinräumige Aufwinde nützt dir das doch beliebig wenig. In der Zeit bist du schon 100m weiter.
Wolfgang schrieb: > ist man schon lange durchgeflogen, bevor die Anzeige überhaupt reagiert. Genau, deshalb sollte die Verzögerung <0.5s sein.
Vergiss kleinraeumige Aufwinde, und die hohen Geschwindigkeiten. Ja man kann einen 50er (15m/s) brettern, dann interessieren Aufwinde aber eh nicht. Um wenn man sich fuer Auwinde interessiert, fliegt man langsamer. Ohne nachgemessen zu haben, erscheint mit ein Filter mit 100ms Zeitkonstante noch auf der eher schnellen Seite. Modellflieger moegen da etwas agiler sein. Aber schnell messen und schnell reagieren sind nicht dasselbe. Die Anzeige ist uebrigens ein Ton. Man kann eh nicht drauf schauen.
:
Bearbeitet durch User
Bei einem Tiefpass ist die Verzoegerung im Bereich der Zeitkonstante.
Der MS5611 ist in der Praxis wesentlich besser als der BMP180/085. Modellflug Varios habe ich mit beiden Varianten schon länger gebaut. Beim MS5611 bekommt man alle 20ms einen neuen Druckwert. Die Tiepass gefilterten Druckwerte werden bei mir über eine Tabelle in Höhe mit cm Auflösung umgerechnet und in einen Ringbuffer gespeichert. Aus diesen Werten werden dann die Steigwerte über eine einstellbare Integrationszeit berechnet. Dabei setze ich noch eine kleine Mittelwert Filterung ein. Als Ergebnis bekommt man ein Vario, das in Ruhe bei einer Ausgabe mit 10cm Auflösung vollkommen ruhig ist. Aber jede Vertikale Bewegung mit geringer Verzögerung ausgibt. @Michael - Was für einen uP und welches Telemetrie System setzt Du bisher ein? Gruß Ingo
Ingo Stahl schrieb: > Der MS5611 ist in der Praxis wesentlich besser als der BMP180/085. > Modellflug Varios habe ich mit beiden Varianten schon länger gebaut. Interessant wäre noch ein Vergleich zum MPL3115. Vielleicht hat da noch jemand ein paar Vergleichsdaten (Cyblord ?).
Im Model sitzt ein tiny85 mit einem TRM-915-R25 Modul. Am Boden ist dann ein gleiches Modul mit Bluetooth das die Daten an das iPhone weiterleitet.
Wolfgang schrieb: > Ingo Stahl schrieb: >> Der MS5611 ist in der Praxis wesentlich besser als der BMP180/085. >> Modellflug Varios habe ich mit beiden Varianten schon länger gebaut. > > Interessant wäre noch ein Vergleich zum MPL3115. Vielleicht hat da noch > jemand ein paar Vergleichsdaten (Cyblord ?). Nein ich habe für den MPL3115 leider keine Vergleichmessungen durchgeführt. Aber der MS5611 sollte auch deutlich besser als der MPL3115 sein. Wenn der Preis egal ist (10 EUR vs. 3 EUR), würde ich zum MS5611 tendieren.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.