Hallo Forum,
ich habe hier ein günstig gebrauchtes Laufband, auf dem ich gemütlich
gehen möchte (Stichpunkt: Laufbandschreibtisch).
Leider bleibt bei niedriger Einstellung der Laufgeschwindigkeit der
Motor schlichtweg stehen ('stall') wenn man das Laufband belastet.
Bei höhere Geschwindigkeit läuft's allerdings problemlos.
Schmieren, Band neu einstellen etc war erfolglos.
-> Meines Erachtens nach ein Problem der Open Loop Regelung.
Freundlicher Weise ist die Mosfet Ansteuerung mittels Jumperkabel einmal
quer über die Platine gelegt, vom Bauteilgrab Regelung zu einem
Optokoppler und von diesem zum Gate des Mosfetpaares. Alles galvanisch
getrennt, aber EMV technisch sicherlich nicht mehr up-to-date..
Es gibt bereits einen Reedswitch zur Erfassung der Drehzahl - der geht
aber nur zur batteriebetriebenen Anzeige.
-Ich würde damit gerne eine Closed Loop Steuerung auf Arduinobasis
aufziehen.
Meine Fragen:
- wie dimensioniere ich die Gegentaktstufe zum Treiben der Mosfets? Bzw
unter welchen Stichwörtern suche ich in Google? Mosfets sind FS22SM
(http://pdf.datasheetcatalog.com/datasheet/powerex/FS22SM-10.pdf ).
- der Motor ist fuer 180VD spezifiziert, an den Mosfets liegen aber m.E.
nach 320V aus dem Gleichrichter an - sehe ich das richtig, dass meine
PWM max 56% Anschaltdauer erreichen darf?
- Welche Reglerform (PI, PID, PD...) nimmt man fuer sowas am
sinnvollsten heran?
Danke & Gruss
FloF
Der Regler schaltet ab, um den Motor nicht zu überlasten. Wenn du den Regler änderst, solltest du also tunlichst auch einen leistungsfähigeren Motor verbauen. Ein besserer Weg wäre, schon einmal abzunehmen, bevor du das Laufband benutzt, damit der Reibungswiderstand geringer ist.
Florian F. schrieb: > - Welche Reglerform (PI, PID, PD...) nimmt man fuer sowas am > sinnvollsten heran? Generell schadet es nicht, einen PID Regler zu implementieren, die unbenutzten Faktoren kannst du immer noch auf Null drehen. Die Application Note AVR221 beschreibt einen PID Regler auf AVR und erklärt auch mit Grafiken die einzelnen Faktoren. http://www.atmel.com/Images/doc2558.pdf Florian F. schrieb: > der Motor ist fuer 180VD spezifiziert Für was? Was sind denn 180VD?
@ Florian F. (flof3000) >Leider bleibt bei niedriger Einstellung der Laufgeschwindigkeit der >Motor schlichtweg stehen ('stall') wenn man das Laufband belastet. Dann sit die Steuerung nicht viel wert. Gerade E-Motoren kann man bis zum Stillstand mit maximalem Drehmoment betreiben, wenn man die richtige Ansteuerung hat. >-> Meines Erachtens nach ein Problem der Open Loop Regelung. Das ist ein Oxymoron ;-) https://de.wikipedia.org/wiki/Oxymoron >Freundlicher Weise ist die Mosfet Ansteuerung mittels Jumperkabel einmal >quer über die Platine gelegt, vom Bauteilgrab Regelung zu einem >Optokoppler und von diesem zum Gate des Mosfetpaares. Alles galvanisch >getrennt, aber EMV technisch sicherlich nicht mehr up-to-date.. Bild? >Es gibt bereits einen Reedswitch zur Erfassung der Drehzahl - der geht >aber nur zur batteriebetriebenen Anzeige. >-Ich würde damit gerne eine Closed Loop Steuerung auf Arduinobasis >aufziehen. Kann man machen. >- wie dimensioniere ich die Gegentaktstufe zum Treiben der Mosfets? Dazu müsste man den Motor kennen. >- der Motor ist fuer 180VD spezifiziert, an den Mosfets liegen aber m.E. >nach 320V aus dem Gleichrichter an - sehe ich das richtig, dass meine >PWM max 56% Anschaltdauer erreichen darf? Kann sein. >- Welche Reglerform (PI, PID, PD...) nimmt man fuer sowas am >sinnvollsten heran? Die einfachste, welche die Anforderungen erfüllt. PI reicht hier sicherlich. Der "Trick" einer gescheiten Motorendstufe liegt in der Strommessung und damit der Überstromabschaltung sowie Stromregelung. Sprich, es gibt zwei kaskadierte Regelkreise. Stromregelung, sehr schnell. Darüber liegt eine langsamere Geschwindigkeitsregelung. Damit kann man das Laufband auch bei maximaler Belastung beliebig langsam laufen lassen. Im Prinzip so, das gilt nicht nur für Servos. http://elm-chan.org/works/smc/report_e.html (Wir verbeugen uns respektvoll vor dem Meister aus dem fernen Osten)
Kombiniere ein SI9910 mit einem IRFP460 .Schnelle Diode parallel zum Motor. Keine Gegentaktendstufe oder was auch immer kompliziertes! PWM ueber Optokoppler (+1 Tr) an den SI9910. Wenn Du langsam fahren willst, dann gibt es auch einen Weg über die Mechanik. Mehr Untersetzung, mehr Drehmoment und wahrscheinlich kein 'STALL' mehr!
Angehängte Dateien:
-

netzteil_4.jpg
240 KB
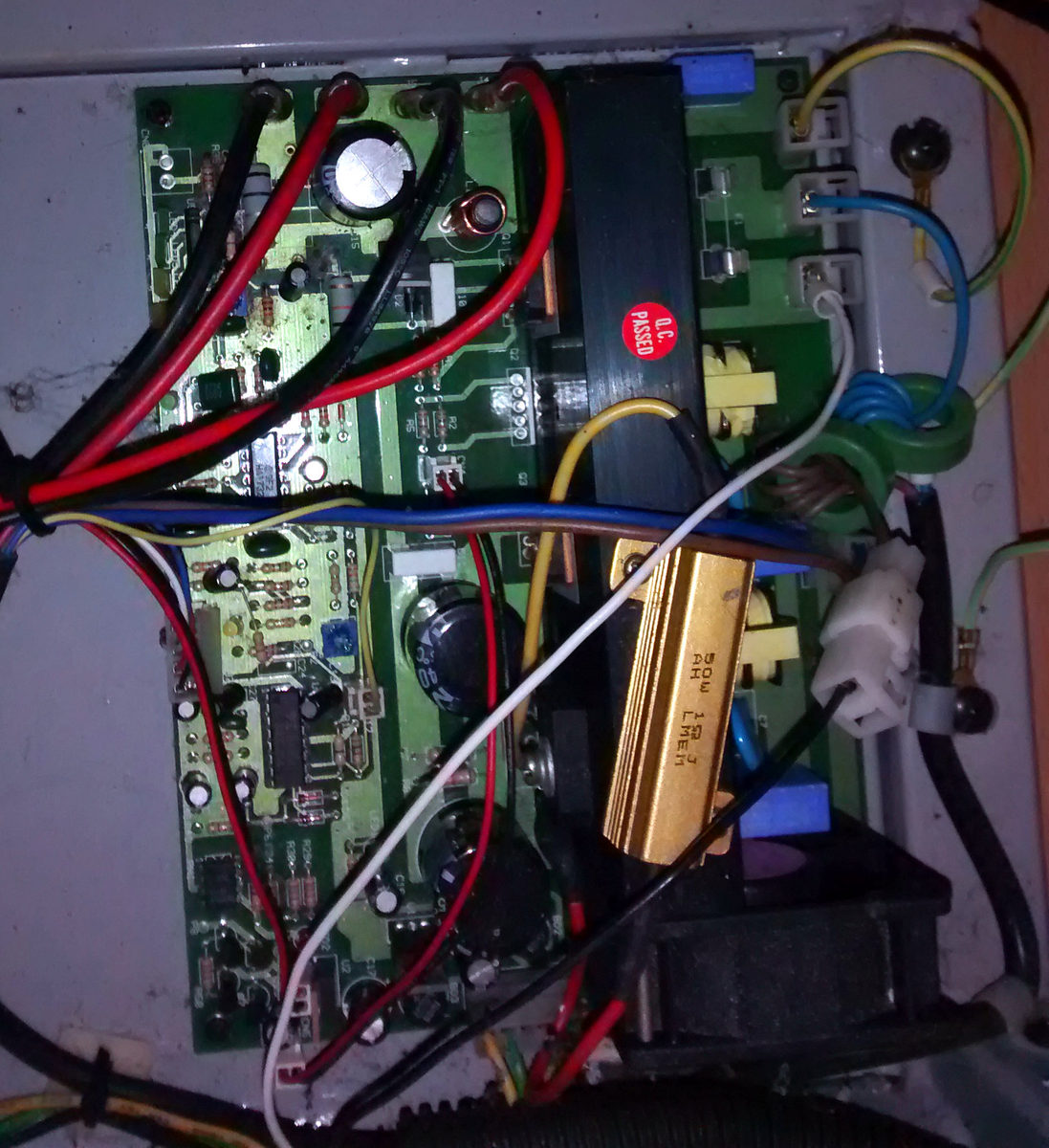
Falk Brunner schrieb: > Dann sit die Steuerung nicht viel wert. Gerade E-Motoren kann man bis > zum Stillstand mit maximalem Drehmoment betreiben, wenn man die richtige > Ansteuerung hat. Exakt mein Gedanke. Anbei das beste Bild, dass ich gerade greifbar habe - besser Bilder kann ich wenn erst heute Abend machen, sorry. Rechts die Wechselspannungsseite, am Kuehlkoerper dann von oben nach unten Mosfet 1, unbestueckt, Mosfet 2, Gleichrichter. Links die 'Steuerung', links unten dann der Optokoppler, die rot/schwarze Leitung die ganz links unten beginnt und bei R2/R5 in der Mitte wieder in die Platine geht trägt die PWM in einem Leiter. Matthias Sch. schrieb: > Was sind denn 180VD? Kreative Tippfehler. Der Motor trägt die Aufschrift 180 V DC, 4 A (1.5 hp). Falk Brunner schrieb: >>- wie dimensioniere ich die Gegentaktstufe zum Treiben der Mosfets? > > Dazu müsste man den Motor kennen. Und ich dachte, das hängt von den Mosfets ab, deren Umschaltgeschwindigkeit minimiert werden soll... was muss ich über den Motor wissen? Peter F. schrieb: > Der Regler schaltet ab, um den Motor nicht zu überlasten. Nein, er schaltet nicht ab. Ich bin auch gerne bereit was fertiges einzusetzen, wenn es denn preislich im Rahmen bleibt - bislang hab ich nur noch nix gefunden. Danke & Gruss FloF
Falk Brunner schrieb: > Gerade E-Motoren kann man bis > zum Stillstand mit maximalem Drehmoment betreiben, wenn man die richtige > Ansteuerung hat. Vorsicht, wenn die Motore ein Lüfterrad auf dem Anker haben kann man sich da bei niedrigen Drehzahlen ganz schnell ins Knie schiessen, weil dann die Kühlung nicht mehr ausreichend ist.
@ Florian F. (flof3000) >Rechts die Wechselspannungsseite, am Kuehlkoerper dann von oben nach >unten Mosfet 1, unbestueckt, Mosfet 2, Gleichrichter. Naja, da der Motor nur in eine Richtung laufen soll und auch nicht bremsen muss, reicht eigentlich ein Ein-Quadratensteller. Siehe Motoransteuerung mit PWM. >>>- wie dimensioniere ich die Gegentaktstufe zum Treiben der Mosfets? >Und ich dachte, das hängt von den Mosfets ab, deren >Umschaltgeschwindigkeit minimiert werden soll... was muss ich über den >Motor wissen? Ach so, falsch gelesen. Stimmt natürlich. Hier reicht ein einfacher MOSFET-Treiber.
Udo Schmitt schrieb: > Vorsicht, wenn die Motore ein Lüfterrad auf dem Anker haben kann man > sich da bei niedrigen Drehzahlen ganz schnell ins Knie schiessen, weil > dann die Kühlung nicht mehr ausreichend ist. Da die Motore meist großzügig dimensioniert sind, fällt bei Minimalgeschwindigkeit, was ja der kürzesten Einschaltzeit pro Periode entspricht, nicht viel Verlustleistung an, solange man nichts dran ändert. Daher können die Motore auch mehr Schaltspannung ab. Florian F. schrieb: > Leider bleibt bei niedriger Einstellung der Laufgeschwindigkeit der > Motor schlichtweg stehen ('stall') wenn man das Laufband belastet. Bist du da sicher, dass es sich dabei nicht um einen durchrutschenden Riemen handelt. Das war bei mir nämlich. Nachdem ich den Motor nach gespannt habe, lief das Band auch bei 1km/h so wie es sollte.
Usus schrieb: >> Vorsicht, wenn die Motore ein Lüfterrad auf dem Anker haben kann man >> sich da bei niedrigen Drehzahlen ganz schnell ins Knie schiessen, weil >> dann die Kühlung nicht mehr ausreichend ist. > > Da die Motore meist großzügig dimensioniert sind, fällt bei > Minimalgeschwindigkeit, was ja der kürzesten Einschaltzeit pro > Periode entspricht, nicht viel Verlustleistung an, solange man > nichts dran ändert. Daher können die Motore auch mehr Schaltspannung > ab. Im Zweifel bekommt er noch einen Luefter - 12V sind aussreichend vorhanden. Usus schrieb: > Bist du da sicher, dass es sich dabei nicht um einen durchrutschenden > Riemen handelt. Das war bei mir nämlich. Nachdem ich den Motor nach > gespannt habe, lief das Band auch bei 1km/h so wie es sollte. Bis eben war ich es, jetzt bin ich unsicher. Ich werd das heute abend auf jeden Fall noch mal mit 'nem Farbklecks auf dem Schwungrad des Motors verifizieren.
Florian F. schrieb: > Im Zweifel bekommt er noch einen Luefter - 12V sind aussreichend > vorhanden. Eigentlich sieht die Elektronik so aus, als wäre fast alles schon fertig. Was ist denn das für ein IC? Das eine scheint ein 324 zu sein (HA17324), was steht auf dem anderen 16-Beiner?
Wir haben eine KA2535A einen HA17324 sowei ein SEC K842(undeutlich auf dem einzigen Foto der ihn zeigt - aber ich hatte ihn schon mal gegooglet, das ist ein Treiber fuer LED-Bar-Graphs. Warum auch immer auf einem Board in einem geschlossenen Gehaeuse ein LED Bargraph drin ist :).
Florian F. schrieb: >> Bist du da sicher, dass es sich dabei nicht um einen durchrutschenden >> Riemen handelt. Das war bei mir nämlich. Nachdem ich den Motor nach >> gespannt habe, lief das Band auch bei 1km/h so wie es sollte. > > Bis eben war ich es, jetzt bin ich unsicher. > Ich werd das heute abend auf jeden Fall noch mal mit 'nem Farbklecks auf > dem Schwungrad des Motors verifizieren. Ja, definitiv kein durchrutschender Riemen sondern ein Stillstand des Motors.
Wenn der Motor so langsam drehen müsste, gibt es meiner Meinung nach nur eine sinnvolle Lösung: ein Getriebe!
Ein Getriebe würde das Problem sicherlich auch lösen - nur ob das Kosteneffizient machbar ist? Allerdings hab ich dann immer noch keine sinnvolle Drehzahlregelung - das Band zischt ja jetzt auch unbelastet nur so durch um dann unter Last deutlich langsamer zu werden.
FloF schrieb: > Wir haben eine KA2535A Wer tippen kann ist klar im Vorteil... Ein KA3525A natürlich.
Flof3000 schrieb: > Ein KA3525A natürlich. Bzw. SG3525 und noch unter einigen anderen Bezeichnungen bekannt. Ist ein klassischer Schaltregler und wurde auch oft in PC Netzteilen usw. verwendet. Die Steuerung dieses Bausteins (klick auf die Bezeichnung führt zum Datenblatt hier im Forum) erfolgt über Pin 1 und Pin 2. Wie ich schon sagte, ist eigentlich alles fertig. Die Aufgabe, die dir bleibt, ist es, eine der Geschwindigkeit proportionale Spannung zu erzeugen und diese dann wieder auf die Regelung zu füttern, die der LM324 (HA17324) bildet. Dazu brauchts vermutlich nicht mal einen MC, sondern einen 2-4 fach OpAmp mit ein paar Trimmpotis.
:
Bearbeitet durch User
@ Florian F. (flof3000) >Allerdings hab ich dann immer noch keine sinnvolle Drehzahlregelung - >das Band zischt ja jetzt auch unbelastet nur so durch um dann unter Last >deutlich langsamer zu werden. Eben weil es KEINERLEI Regleung hat, nur einen Steller. Der dreht einfach die mittlere Spannung runter. Damit läuft der Motor langsamer. Wenn er aber dann belastet wird, sinkt die effektiv wirksame Spannung am Motor weiter, wegen des Spannungsabfalls an der Motorwicklung. -> noch langsamer
Das ist mal ein deutlich schöneres Datenblatt als das zum KA3525A :). Eine zur Geschwindigkeit proportionale Spannung ist ja kein Problem - und die gebe ich dann auf Pin 1 = 'Error Amp' (oder 2 je nachdem ob meine Spannung 0->5V oder 5V-> 0V läuft?) des KA3525A. D.h. die Spannung an Error Amp gibt ihm im Endeffekt den PWM Duty Cycle vor, den er generieren soll? Sorry der doofen Fragen, aber das Datenblatt setzt - wie so oft - vor raus, dass man vorher verstanden hat was das Ding genau macht. Danke schon mal vielmals, FloF
Es gibt bereits einen Reedswitch zur Erfassung der Drehzahl - der geht aber nur zur batteriebetriebenen Anzeige. Wieviele Impulse pro Motorumdrehung? Null komma 1? Einen Speed Sensor mit wesentlich mehr Impulsen benötigst Du für eine Regelung,die auch bei geringer Drehzahl funktionieren soll.
FloF schrieb: > Eine zur Geschwindigkeit proportionale Spannung ist ja kein Problem - > und die gebe ich dann auf Pin 1 = 'Error Amp' (oder 2 je nachdem ob > meine Spannung 0->5V oder 5V-> 0V läuft?) des KA3525A. Nicht direkt, du willst ja auch noch einen Knopf haben, an dem du die Geschwindigkeit einstellst, ich vermute, das die ganze Sache von dem LM324 gesteuert wird, und der geht dann auf den 3525. Da ist der Ansatz. Nehmen wir mal an, das du eine Spannung erzeugen kannst, die kleiner wird, wenn das Laufband schneller ist, kannst du evtl. direkt diese Spannung am Reglerknöpfchen einspeisen und bist mit der Regelung fertig (mal etwas vereinfacht). Mehr Fotos (auch vom Bedienfeld) könnten hilfreich sein.
Kommt so oder so ein Mikrocontroller dazwischen - Arduino Minis hab ich ein halbes Dutzend da, op apms etc nicht, damit kann ich die Spannung entsprechend der Zieldrehzahl aendern. Ich geb zu, ich verstehe noch nicht was der LM324 dabei macht - das ist doch ein Operationsverstärker? Vom Bedienteil habe ich gerade kein Bild - ein Schiebepoti, irgendwelche Beschaltung die dafuer sorgt, dass das Poti erst auf 0 gezogen werden muss bevor das Laufband nach Netzspannungsverlust wieder anlaeuft. 5 Adern zur Regelung. Ein Aufdruck mit dem Warhinweis, das Schiebepoti nicht zu schnell zu bewegen 'um den Motor nicht zu überlasten'. Sagt eigentlich alles ueber den verbaueten Steller ^^. Werde heute Abend mal schauen, wo die Leitungen vom Bedienteil hingehen - vermutlich zum LM324. Gruss FloF
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.