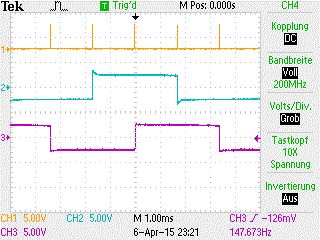
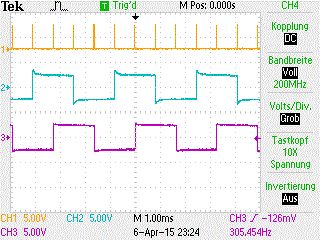
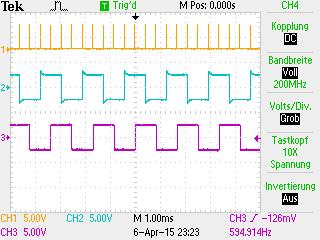
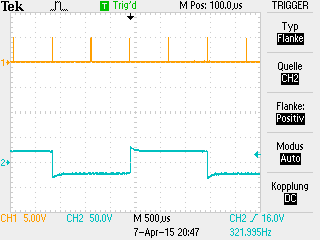
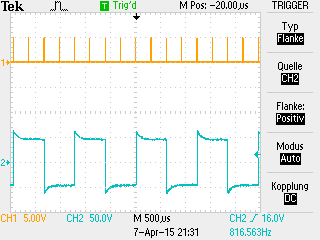
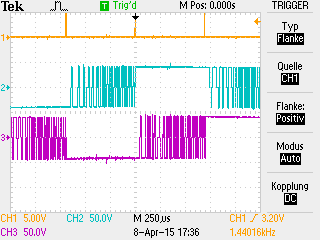
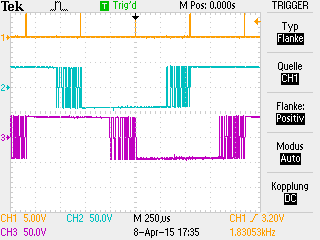
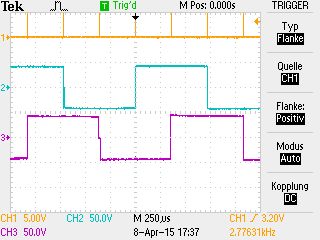
Hallo ich bin relativ neu in die Thematik Schrittmotor Treiber eingestiegen, also bitte um Nachsicht, wenn ich etwas falsches sage, oder eine Frage stelle die schon mal beantwortet wurde... 1.Ich habe 2 Schrittmotoren günstig gebraucht gekauft. http://www.motioncontrolproducts.com/pdfs/FL60STH86-3008BF.pdf Dabei den 2. FL60STH86-3008BF Motoren sehen unbenutzt aus (eigentlich wie neu), auch innen keine Anzeichen, alle Wicklungen habe ca 13 Ohm, kein Kurzschluss, keine Überhitzung der Spulen ersichtlich) 2. 2 neue China Treiber HY-DIV268N (Single Axis TB6600) mit 5A und ein TB6560 3A (habe sogar 2 getestet) 4.ich steuere diese mit einem Arduino UNO über Estlcam 5. Bilder vom Oszi: gelb: Eingangssignal vom Treiber grün: Ausgang bzw Motor Coil A (Spannung x10!) lila: Coil B (Spannung x10!) 6. Beschaltung: hab Bipolar Serie und Bipolar Parallel getestet (dabei den Strom natürlich verändert) 7.Netzteil 24V 5A (Industrienetzteil) Spannung kontrolliert bei dem Versuch! 8. Diverse Einstellungen verändert (Schrittimpulslänge, Strom usw) 9. bei Halbschritten (oder1/8) ähnliches Verhalten nur natürlich schon bei weniger Umdrehungen 10. alle Versuche im Lehrlauf (Belastung durch Hand auf größere Scheibe, sodass ich auch Stoppen kann) Jetzt habe ich folgendes komische verhalten von meinen Motoren: im unteren Drehzahlbereich (im Bild 11TEK z.b. ca 500 PPs = 2,5 U/s) ist alles gut, sobald ich wie im Bild 12TEK (etwas über 1000 PPs) bleibt der Motor stehen. Nur ab und zu (ca 20% der Versuche) dreht er ganz normal mit "voller" Kraft. Erhöhe ich weiter die geschwindigkeit dreht er wieder ganz normal. Ab ca 2000 PPs (Bild 13TEK) ist Schluss und er dreht sich wieder nur sehr selten richtig und brummt. Dabei lässt sich die Welle relativ leicht drehen, nur etwas schwerer als ohne Strom. 10. Ich habe jetzt schon 1 Tag daran verbracht, und komme nicht weiter. was mache ich falsch , was übersehe ich? Motoren defekt? alle 3 Endstufen Schrott? 11. Im PDF geht die PPs Skala bis 10000, das kann ich kaum glauben ?! 12. mit welchem Trick testet man die Nm am besten ? (ich dachte mit einem Ausleger und einem Gewicht drann.... oder geht's besser?) 13. in vielen Beschreibungen, und auch in dieser, steht Nm, das kann ja nicht sein! was meinen die damit (oft steht da auch Ncm) ? 14. Wie auf dem Oszi zu sehen tritt die Strombegrenzung nicht ein (ist ja Leerlauf) und die Spannung geht auf volle 24 Volt, wie ich gelesen habe ist das ja ok.
Angehängte Dateien:
-

11TEK_5.gif
13 KB -

12TEK_10.gif
14 KB -

13TEK_20.png
2,6 KB
Udo Schlegel schrieb: > was mache ich falsch Vermutlich fährst du keine sauberen Beschleunigungsrampen.
Udo Schlegel schrieb: > 7.Netzteil 24V 5A (Industrienetzteil) Spannung kontrolliert bei dem > Versuch! Bei höheren Schrittfrequenzen könnte die Spannung zu niedrig sein, so dass zu wenig Strom fließt. > 13. in vielen Beschreibungen, und auch in dieser, steht Nm, das kann ja > nicht sein! was meinen die damit (oft steht da auch Ncm) ? Warum nicht? Nm ist doch eine vernünftige Einheit für ein Drehmoment.
Die Motoren haben 13 Ohm? Die Kurven A und B sind unklar. Angezeigt werden rund 5 V Pegel und die soll man dann noch x10 nehmen? Wenn die Spulen so niederohmig sind, wie im Datenblatt und die Betriebsspannung bei 24 V liegt, hast Du an den Spulen keine Rechtecksignale, sondern ein höherfrequentes (> 10 kHz) Pulsieren der Spannung, mit der ein konstanter Strom eingeprägt wird. Die Angaben sind so nicht plausibel.
Angehängte Dateien:
-

StepperResonance.png
36 KB
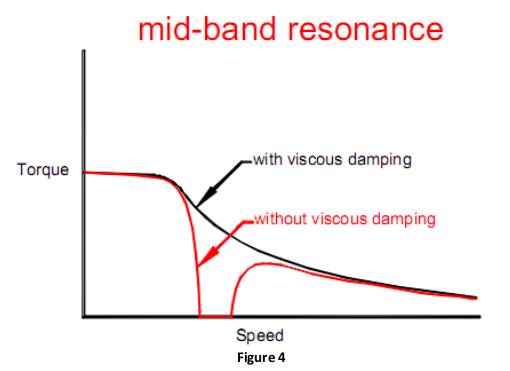
Das klingt nach "mid-band resonance" http://www.geckodrive.com/support/step-motor-basics/mid-band-instability.html MfG Klaus
Angehängte Dateien:
-

F0016TEK.png
2,2 KB -

F0015TEK.png
2,1 KB
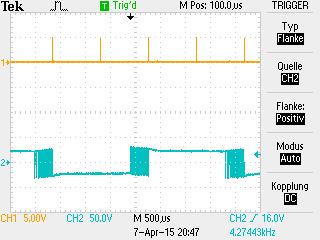
Wolfgang schrieb: > Vermutlich fährst du keine sauberen Beschleunigungsrampen. Hab viel getestet, kann man natürlich alles einstellen. Deshalb schieße ich das mal aus, aber teste nochmal... Nein selbst wenn ich 10 Sekunden Rampe mache! Wolfgang schrieb: >> 7.Netzteil 24V 5A (Industrienetzteil) Spannung kontrolliert bei dem >> Versuch! > > Bei höheren Schrittfrequenzen könnte die Spannung zu niedrig sein, so > dass zu wenig Strom fließt. > >> 13. in vielen Beschreibungen, und auch in dieser, steht Nm, das kann ja >> nicht sein! was meinen die damit (oft steht da auch Ncm) ? > > Warum nicht? Nm ist doch eine vernünftige Einheit für ein Drehmoment. Spannung bricht nicht ein, Strom ist ja auch nicht das Problem, im Leerlauf (teste ja nur einen Motor immer) Spannung höher ok, aber die Treiber verkraften ja nicht unendlich, aber ich Teste mal mit max zulässigen 36V.. Nm ist ja auch sinnig, aber im Datenblatt steht 2.500 Nm, das ist nicht sinnig! soviel Kraft wäre geil, würde da gleich ein E-Auto draus bauen^^ m.n. schrieb: > Die Motoren haben 13 Ohm? Tippfehler 1,3 Ohm , wie im Datenblatt (jede einzelne Wicklung) m.n. schrieb: > Die Kurven A und B sind unklar. Angezeigt werden rund 5 V Pegel und die > soll man dann noch x10 nehmen? Gelb ist Input und ein 5 V Impuls (1 Kästchen 1ms) die beiden anderen jeweils ein Coil, der kleine gleichfarbige Pfeil links ist 0V, dann 1/2 Kästchen nach oben sind 2,5V x 10 vom Tastkopf sind +25V und das gleiche nach unten -25V. Hatte vergessen die x10 des Tastkopfes im Oszi einzugeben. m.n. schrieb: > Wenn die Spulen so niederohmig sind, wie im Datenblatt und die > Betriebsspannung bei 24 V liegt, hast Du an den Spulen keine > Rechtecksignale, sondern ein höherfrequentes (> 10 kHz) Pulsieren der > Spannung, mit der ein konstanter Strom eingeprägt wird. > Die Angaben sind so nicht plausibel. die ersten Bilder hab ich wirklich so aufgenommen, mit Bipolar Serie , also 2,6 Ohm je Spule. jetzt hab ich mir deins durchgelesen, und das klingt ja auch so wie ich es mir angelesen hatte. Daraufhin hab ich nochmal was getestet: Bipolar Parallel, also 0,7 Ohm und siehe da, bei niedriger Drehzahl kommt das Rechtecksignal auch, wenn auch nicht ganz durch. Nur minimal höher (siehe 2. Bild wieder ein schönes Rechtecksignal. Achtung hab jetzt 500 µs, und richtige Volt. wenn ich schneller werde dreht er noch, aber es bleibt ein Rechteck Signal bin halt noch sehr langsam....
Udo Schlegel schrieb: > Nm ist ja auch sinnig, aber im Datenblatt steht 2.500 Nm, das ist nicht > sinnig! soviel Kraft wäre geil, würde da gleich ein E-Auto draus bauen^^ Das sind 2,5Nm, andere Länder, andere Dezimalpunkte. Spannung könnte echt zu niedrig sein, parallel kann man dem Motor ohne weiteres 55V zumuten. Dabei gehts darum, dass mit einer höheren Spannung der Treiber den Strom schneller in den Motor hinein"drücken" kann. Hat nichts damit zu tun ob die Versorgungsspannung einbricht oder nicht. Dass der Strom-Chopper des Treibers offenbar nichts tut spricht dafür, dass der eingestellte Strom nicht erreicht wird. Eventuell ist der Strom für Leerlauf auch zu gross, und der Motor bleibt in einer Resonanz hängen --> mit Belastung und/oder mit kleiner Strom-Einstellung die Beschleunigungsrampe durchfahren. Ich bring meine Nema23 Motoren mit 24V und 700mA ohne Belastung in 2s auf >1200UPM. IIRC.
Angehängte Dateien:
-

F0017TEK.png
2,3 KB
rmu schrieb: > Das sind 2,5Nm, andere Länder, andere Dezimalpunkte. ok, trotzdem viel, werd mal testen... rmu schrieb: > Spannung könnte echt zu niedrig sein, parallel kann man dem Motor ohne > weiteres 55V zumuten. Dabei gehts darum, dass mit einer höheren Spannung > der Treiber den Strom schneller in den Motor hinein"drücken" kann. jop, hatte das schon gelesen, jetzt wird's noch klarer ;-) Aber der Große Treiber kann nur 46V und der kleine 35V. Hab jetzt mit 46V getestet, und kam auf max siehe Bild. sehr selten schafft er es nicht. Hab ja noch Zeit zum testen jetzt noch meine Rechnung: Gegeben: wie im Bild sind das 1 Takt alle 300 µs Volltakt 200 Schritte / Umdrehung PPs =1/0,0003s =3333 PPs U/s= PPs / 200Schritte/U =16,6 U/s =1000U/min sollte doch stimmen?! OK wenn das das Maximum sein soll dann ist das halt so, habe auf dem Datenblatt bei 50% Drehmoment immerhin ca 5000PPs gelesen. Ihr habt leider Recht, und der Treiber kann nicht mehr Spannung, darum mehr Strom reinpumpen. Was mich noch stört bei dem TB6600. Der TB6560 hat eine Stromreduzierung während des Stillstandes (wählbar). Das hab ich bei dem TB6600 nicht gefunden. Der Motor wird natürlich schön warm bei max 5A... Das wäre bei meiner Fräse nicht nötig. Gibt's da noch Tricks Verbesserungen ???, dann löt ich schnell um^^ Danke allen für heute, habt mir sehr geholfen!! morgen geht's weiter..
Udo Schlegel schrieb: > also 2,6 Ohm je Spule. Mal grob gerechnet, würde mit der gezeigten Spulenspannung ein Strom von je 9 A fließen (24/2,6). Das kann doch garnicht sein! rmu schrieb: > Spannung könnte echt zu niedrig sein, parallel kann man dem Motor ohne > weiteres 55V zumuten. Der Motor müßte mit 12 V Versorgungsspannung schon bestens laufen, in Parallelschaltung im bipolaren Betrieb sogar mit höheren Drehzahlen.
m.n. schrieb: >> also 2,6 Ohm je Spule. > > Mal grob gerechnet, würde mit der gezeigten Spulenspannung ein Strom von > je 9 A fließen (24/2,6). Das kann doch garnicht sein! Ohne Drehzahl und im unteren Drehzahl Bereich ist das ja auch soo, der Treiber Regelt schön im KHz Bereich und lässt den maximalen Eingestellten Strom fließen. Gut zu erkennen im Bild F0016TEK.npg. Wobei hier schon nur der Anfang geregelt wird. Das nächste Bild F0015TEK ist alles gleich, nur die Drehzahl ein wenig höher, und schon sieht man keine Reglung mehr. Dabei ist dieser Anordnung sogar Parallel, 0,7 Ohm 24v (4,5A am Treiber eingestellt) m.n. schrieb: > Der Motor müßte mit 12 V Versorgungsspannung schon bestens laufen, in Deswegen war ja meine Frage was da nicht stimmt, da das bei mir nicht soo geht. m.n. schrieb: > in Parallelschaltung im bipolaren Betrieb sogar mit höheren Drehzahlen. Was sind höhere Drehzahlen? 2 oder 10 oder 10000, dann noch eine Einheit hinten ran (u/min, PPs, U/s, ) Bin immer noch offen für Anregungen, Tips!
Udo Schlegel schrieb: > Gut zu erkennen im Bild F0016TEK.npg. > Wobei hier schon nur der Anfang geregelt wird. Gut zu erkennen ist nur, daß die vermeintliche 'Regelung' vor dem Eintreffen des neuen Taktimpulses stattfindet ;-) Da schwingt irgendetwas; geregelt wird dort garnichts!
m.n. schrieb: > Gut zu erkennen ist nur, daß die vermeintliche 'Regelung' vor dem > Eintreffen des neuen Taktimpulses stattfindet ;-) Ist auch nur ein Coil am Oszilloskop. Ok, sage ja auch nicht das das super ist, aber eins ist auch klar, das die Reglung im 2 Stellen KHz Bereich arbeitet. Finde leider nichts dazu im Netz über den Treiber. Dazu ist die Auflösung zu grob eingestellt. Aber heute abend schau ich mal mit wieviel KHz die Reglung arbeitet.
Ich verstehe gar nicht was du da misst. Wenn das ein normaler stromgeregelter Treiber ist, müsstest Du die PWM deutlich sehen können, und kein einfaches Rechteck-Signal?! Mit freundlichen Grüßen Thorsten Ostermann
Angehängte Dateien:
-

000_stillstandTEK.png
3,2 KB -

001_444u_mTEK.png
2,7 KB -

002_555u_mTEK.png
2,5 KB -

003_833u_mTEK.png
2,4 KB
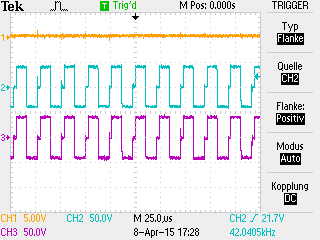
Thorsten Ostermann schrieb: > Ich verstehe gar nicht was du da misst. Ich verstehe es, aber es ist klar, weil ich ja auch messe, und die Randbedingungen habe ich wahrscheinlich zu undeutlich beschrieben. Ich versuche es nochmal. Messaufbau: 45V , Treiber TB6600, Vollschritt, 4,2A Strombegrenzung eingestellt, Motor FL60STH86-3008BF in Bipolar Parallel 0,65 Ohm Oszi: Gelb Eingang/CLK Blau Coil A Violett Coil B Zeitachse beim 000_stillstand 25 µs, bei den anderen 250 µs Spannung gelb 5V ein Kästchen, Colis 50V Kästchen der kleine Pfeil links ist 0V Bilder sind mit Nummer und U/min beschriftet Bild 000 klar stillstand, und man sieht die 42 kHz Oszilatorfrequenz des Treibers. Jetzt sieht man es deutlich. Bild 001 444U/min und er läuft ruhig wie er es machen soll. Frequenzen sieht man deutlich und gut. (ob das I.O. ist weis ich ja nicht) Bild 002 555U/min läuft immer noch ruhig. Der Frequenzgang sieht aber anders aus! Bild 003 833U/min läuft immer noch genau so ruhig. Frequenzgang ...es fehlt die Oszilatorfrequenz ganz. wenn ich weiter steigere ist bei 950-1100 U/min Schluss, und läuft nicht bis auf die Rampe natürlich (Rampe natürlich sehr lang) Der Frequenzgang ähnelt dann 003 natürlich bissle schneller.. wenn jemand noch ein Tipp hat wie ich besser messen kann (dachte mir z.b. nach den Optokopplern das Eingangs Signal zu messen) Wie gesagt, bin schon viel weiter als zu Anfang jetzt laufen sie ja einigermassen.
Udo Schlegel schrieb: > Messaufbau: > 45V , Treiber TB6600, Vollschritt, 4,2A Strombegrenzung eingestellt, > Motor FL60STH86-3008BF in Bipolar Parallel 0,65 Ohm Wo hast du die Strombegrenzung eingestellt? Am Netzteil oder als Sollwert am Treiber?
Habe das gerade noch gefunden: "Diese Überlegungen kann man sich meistens sparen, es sei denn man verwendet hohe Versorgungsspannungen und Motore mir sehr geringer Induktivität. In der Regel wird es so sein, daß bei z.B. 10kHz Schrittfrequenz die Strombegrenzung garnicht mehr einsetzt, da der Strom nicht schnell genug ansteigen kann." Meine Schaltung hat ja "nur" 3,2mH aber bei mir fängt das bei 1,8kHz an...
Wolfgang schrieb: > Wo hast du die Strombegrenzung eingestellt? > Am Netzteil oder als Sollwert am Treiber? sorry, aber habe mich schon paar tage vorher eingelesen^^ ..am Treiber. Habe auch diverse andere Eistellung gemacht. Aber z.B. von 4,2 auf 5 A merkt man gar nichts. Die Kraft des Motors messe ich ja nicht
rmu schrieb: > Nm ist ja auch sinnig, aber im Datenblatt steht 2.500 Nm, das ist nicht >> sinnig! soviel Kraft wäre geil, würde da gleich ein E-Auto draus bauen^^ > > Das sind 2,5Nm, andere Länder, andere Dezimalpunkte. wollte das mal wissen und da mir niemand ein Tipp gegeben hat wie ich das am besten mache hab ich mal selber was entwickelt. 5A Motorstrom am Regler Habe ein Hebel angebracht. ein Gewicht angehängt. 270mm Hebel zu 400g Gewicht. Dann erstmals Haltemoment festgestellt, das waren gerundet die oben genannten Verhältnisse. Dann das Gewicht an einen Faden befestigt, gleicher Hebel. jetzt bei 90° (Hebel waagerecht)ist wieder das Haltemoment. Jetzt lasse ich den Motor von 0°(Hebel senkrecht nach unten) nach 90°fahren. Dort wo der Motor es nicht mehr schafft Winkel messen. So jetzt etwas Mathe: M in Nm = l Hebel x F Kraft in N x Sinus Winkel. Also bei 90°: sin 90°=1 x 4N x 0,27m = 1,08 Nm ich fahre mit ca 100U/min schafft er 40° = 1,08x 0,64 = 0,69 Nm reduziere ich auf 3,3 A sind es immer noch ca 30° =0,54Nm soo jetzt aber ab ins Glasbiergeschäft, vielleicht habe ich da mehr Glück;-)
Hallo Udo, >> Ich verstehe gar nicht was du da misst. > > Ich verstehe es, aber es ist klar, weil ich ja auch messe, und die > Randbedingungen habe ich wahrscheinlich zu undeutlich beschrieben. > Ich versuche es nochmal. > > Oszi: > Gelb Eingang/CLK > Blau Coil A > Violett Coil B Und was genau ist "Coil A" und "Coil B"? Ein Ende der Wicklung gegen Masse? Oder differentiell gemessen? Auf jeden Fall sieht man sehr deutlich, dass bei 833U/min keine Stromregelung mehr statt findet. Dort fällt dann das Drehmoment zu steigenden Drehzahlen steil ab. Das ist unter den gegebenen Randbedinungen ein normaler Wert. Die Frage wäre eher, auf was sich die eingangs von dir genannten 10.000pps beziehen. Wenn da Mikroschritte statt Voll- oder Halbschritten gemeint sind, kann man mit der Angabe wenig anfangen. Bei Vollschritt wären das 50 U/s. Die erreicht man nur mit höheren Spannungen, wenig Last und sehr langen Rampen. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Das ist unter den gegebenen Randbedinungen ein normaler Wert. Danke für eine Aussage. Wie schon gesagt, ich weiß nicht was nochmal ist, ist mein erstes ernsthaftes Projekt mit Schrittmotoren. Thorsten Ostermann schrieb: > Und was genau ist "Coil A" und "Coil B"? Ein Ende der Wicklung gegen > Masse? Oder differentiell gemessen? Da hast du nicht genug nachgedacht, wenn man gegen Masse messen würde, wäre der Wert auch mal 0 Volt, weil ja Bipolar angesteuert wird. Das sieht man auch gut im Oszilloskop Print. (hoffe ich wenigstens ) Also bleibt ja nur übrig, das ich die Spulenenden, auf dem Treiber steht glaub A und A mit einem Strich, zum Oszilloskop führe. Also mir fällt jetzt keine Sinnvolle mehr ein. Aber du hast recht, mann weiß nie wie der andere Denkt ? Das mit den Coil habe ich mir abgelesen und meine das so verstanden zu haben : eine oder mehrere Spulen, die zusammen auf einem Kern liegen. Da ich ja leider einen Unipolaren Motor habe, sitzen dort 2 Spulen auf einem KerKern, die man entweder in Reihe, oder Parallel schalten kann. Für die Messung war der Parallel verschaltet. Thorsten Ostermann schrieb: > Die Frage wäre eher, auf was sich die eingangs von dir genannten > 10.000pps beziehen. Wenn da Mikroschritte statt Voll- oder Halbschritten > gemeint sind, kann man mit der Angabe wenig anfangen. Bei Vollschritt > wären das 50 U/s. Die erreicht man nur mit höheren Spannungen, wenig > Last und sehr langen Rampen. Das mit den 10.000 PPs war glaub zu Anfang ein Irrtum von mir. Ich habe mit einer Frässoftware angesteuert, die natürlich nicht PPs oder U/s bzw min direkt was anfängt. Habe das aber jetzt raus und kontrolliert. Die letzten Daten habe auch deshalb im U/min gemacht, diese stimmen jetzt auch relativ genau. Fakt ist, nach dem Feintuning an mehr Volt, Rampen und Taktlängen jetzt 1200 U/min also 20 U/s erreiche ich. -Ich danke nochmal allen für die Tips, sonst wäre ich schon verzweifelt. - Ich habe schon gesehen das ich noch nicht fertig bin, in Bezug auf Schrittverluste und dann das eigentliche Fräsen ..... Datum frage ich nochmal in die Runde: ist das Ende der Fahnenstange mit diesen billigen Komponenten, oder sollte das noch besser gehen? Weiter noch, falls jemand Tipps zum Optimieren hat, her damit! Auf die Frage mit der Stomabsenkung hatte auch noch keiner ein Kommentar....
Udo Schlegel schrieb: > Thorsten Ostermann schrieb: >> Und was genau ist "Coil A" und "Coil B"? Ein Ende der Wicklung gegen >> Masse? Oder differentiell gemessen? > > Da hast du nicht genug nachgedacht, wenn man gegen Masse messen würde, > wäre der Wert auch mal 0 Volt, weil ja Bipolar angesteuert wird Udo Schlegel schrieb: > Da ich ja leider einen Unipolaren Motor habe, Wer hat da nicht nachgedacht? Ich verstehe immer noch nicht, was Du veranstaltest. Läßt Du Deinen Motor locker auf dem Tisch liegen und bei Resonanzfrequenz herumzappeln? Das geht nie gut. Udo Schlegel schrieb: > Messaufbau: > 45V , Treiber TB6600, Vollschritt, Vollschritt ist ganz schlecht. Nimm eine Betriebsart ab 1/4 Schritt aufwärts. Udo Schlegel schrieb: > Auf die Frage mit der Stomabsenkung hatte auch noch keiner ein > Kommentar.... Es gibt doch einen extra Eingang zur Absenkung auf 30%. Andernfalls senkt man einfach Vref. Wo ist das Problem?
m.n. schrieb: > Es gibt doch einen extra Eingang zur Absenkung auf 30%. Andernfalls > senkt man einfach Vref. Wo ist das Problem? 1. Wo soll der sein? Bitte ja, das wäre toll, aber finde nichts. Beim TB 6560 ja, der macht automatisch weniger, was man per Dip Schalter wählen kann. Oft sind zwar zu wenig Schalter verbaut, sodass man nur 2 Voreinstellung wählen kann, aber das funktioniert gut, und man braucht keinen separaten Eingang. Alles automatisch wie ich es mir träume. 2. Selbst wenn ein Eingang gibt, müsste meine Software das machen, was sie nicht kann. Klar kann ich mir etwas bauen, das wenn kein Impuls kommt der Strom abgesenkt wird, da kann ich aber dann auch die Dip Schalter des Treibers manipulieren. Ich merke grad, gute Idee, gut das wir drüber gesprochen haben. m.n. schrieb: > Wer hat da nicht nachgedacht? Das war nicht böse gemeint, aber ich habe doch alles beschrieben. wenn was fehlt, was sein kann, dann bitte konkret. m.n. schrieb: > Läßt Du Deinen Motor locker auf dem Tisch liegen Ok, das habe ich nicht geschrieben, aber habe Schraubzwinge an einer sehr stabilen Holzplatte. Mit Resonanz dreht er ab und zu nicht, da hast du recht. m.n. schrieb: > Vollschritt ist ganz schlecht. Nimm eine Betriebsart ab 1/4 Schritt > aufwärts. Ok, davon höre ich jetzt das erste mal, bin aber Ohr. Warum, was verbessert sich? Habe halt nur das Problem, das ich noch langsamer werde. Meine Spindeln der älteren Fräse haben nur 1,5mm Steigung...Der Ei m.n.verlieritrag #4084944: > Ich verstehe immer noch nicht, was Du veranstaltest Wenn du das messen meinst, weiß ich nicht wie ich es noch besser beschreiben soll, und soviel kann man da ja auch nicht falsch machen, bin ja kein blutiger Anfänger.
Hi >soviel kann man da ja auch nicht falsch machen, >bin ja kein blutiger Anfänger. Warum misst du nicht einfach die Spannung an den Shunt-Widerständen? MfG Spess
Hallo Udo, > m.n. schrieb: >> Wer hat da nicht nachgedacht? > > Das war nicht böse gemeint, aber ich habe doch alles beschrieben. wenn > was fehlt, was sein kann, dann bitte konkret. Für eine differentielle Messung benötigt man einen entsprechenden Tastkopf. Ich unterstelle mal, dass den hier die aller wenigsten besitzen werden. Also ist die Annahme, das gegen Masse gemessen wurde nicht so abwegig, oder? > m.n. schrieb: >> Vollschritt ist ganz schlecht. Nimm eine Betriebsart ab 1/4 Schritt >> aufwärts. > > Ok, davon höre ich jetzt das erste mal, bin aber Ohr. > Warum, was verbessert sich? Weil der Motor dann gleichmäßiger dreht und weniger "Sprünge" von Schritt zu Schritt machen muss. Viel hast du zum Thema scheinbar noch nicht gelesen?! [1, 2] > Habe halt nur das Problem, das ich noch langsamer werde. Meine Spindeln > der älteren Fräse haben nur 1,5mm Steigung... Ja und? Deine Steuerung muss dann halt die 4-fache Frequenz ausgeben, dann dreht der Motor mit 1/4-Schritt genau so schnell wie vorher bei Vollschritt. > m.n.verlieritrag #4084944: >> Ich verstehe immer noch nicht, was Du veranstaltest > > Wenn du das messen meinst, weiß ich nicht wie ich es noch besser > beschreiben soll, und soviel kann man da ja auch nicht falsch machen, > bin ja kein blutiger Anfänger. Ein Foto oder eine Skizze könnten helfen... Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.schrittmotor-blog.de/resonanzen-bei-schrittmotoren/ [2] http://www.schrittmotor-blog.de/einschwingverhalten-von-schrittmotoren/
Thorsten Ostermann schrieb: > differentielle Messung benötigt man einen entsprechenden Tastkopf. Habe keinen, aber das ist für diese Messung auch nicht wichtig, da ich ein relativ neues Gerät habe, mit Massetrennung. (was so einen Tastkopf aber nicht überflüssig macht). Das habe ich schon früher mal geteste. Thorsten Ostermann schrieb: > Weil der Motor dann gleichmäßiger dreht und weniger "Sprünge" von > Schritt zu Schritt machen muss. Viel hast du zum Thema scheinbar noch > nicht gelesen?! [1, 2] Diese und die anderen Artikel von diesem Typ sind klasse und verständlich geschrieben. Und das mit den gleichmäßig usw ist klar. Ich dachte du bringst neue Erkenntnisse auf meine Probleme bezogen. Aber werde nochmal alles lesen, und schauen ob ich parallelen zu meinem Problem finde. Ich habe zu Anfang auch kleinere Schritte getestet, es wurde drastisch schlechter, und da dachte ich ich konzentriere mich mal auf volle Schritte. Wenn man zuviel verschiedenes testet, hat man das Problem das mann sich schnell verrennt. Aber ich lasse nichts unversucht.... Heute abend versuche ich das auch. Thorsten Ostermann schrieb: > Ja und? Deine Steuerung muss dann halt die 4-fache Frequenz ausgeben, > dann dreht der Motor mit 1/4-Schritt genau so schnell wie vorher bei > Vollschritt. Das ist wahrlich kein Thema, aber wie gesagt, zu Anfang könnte ich die PPs nicht steigern, dadurch natürlich noch weniger enddrehzahl.. Thorsten Ostermann schrieb: > Ein Foto oder eine Skizze könnten helfen... Kommt heute Abend , bin auf der Arbeit....
Angehängte Dateien:
-

Treiber.png
16 KB
{kind=link}
{kind=link}
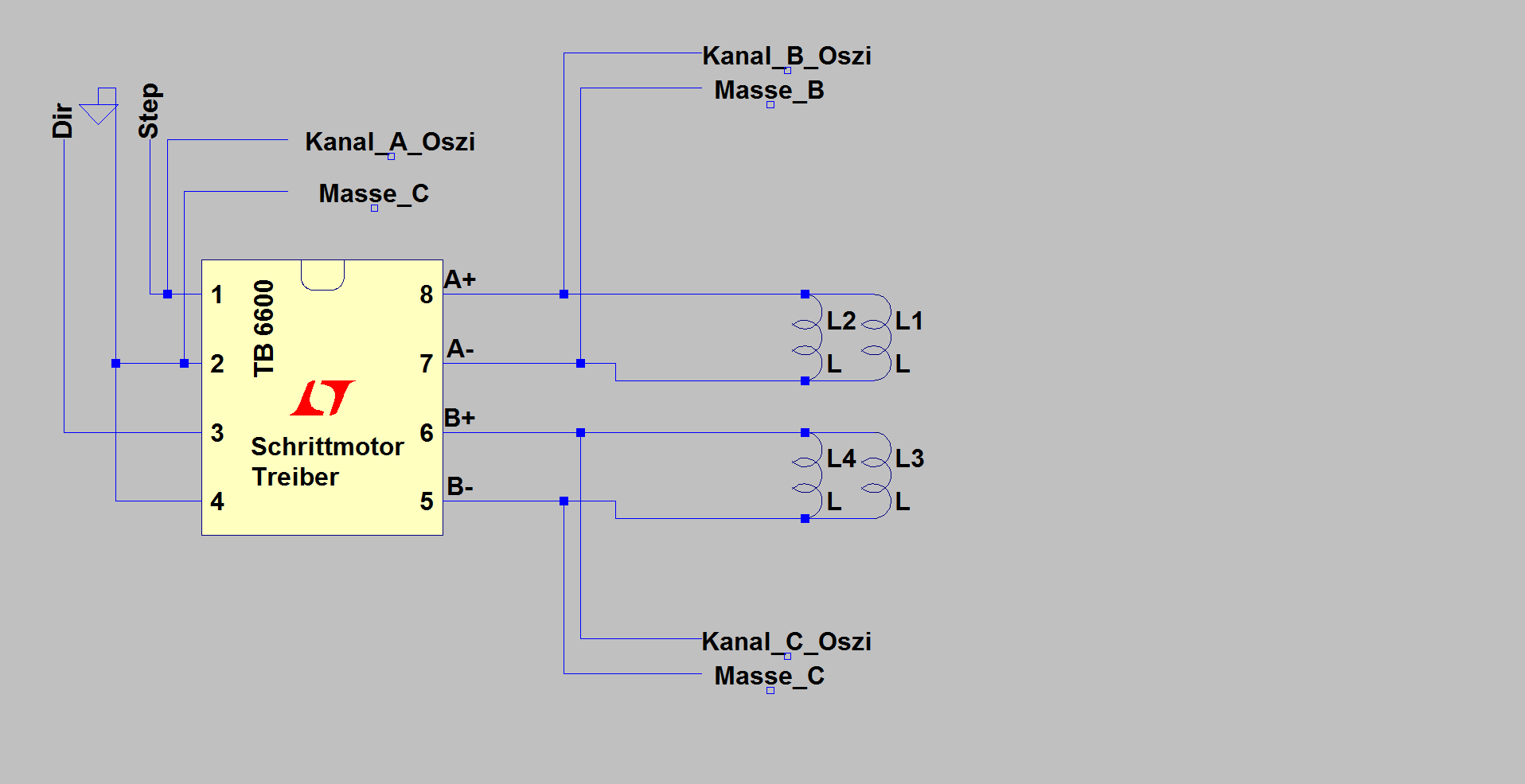
das versprochene Bild der Messanschlüsse. wie schon erwähnt, die Massen der Oszikanäle sind getrennt. Auch Potential-getrennt zur Masse Stromversorgung. nachdem ja jetzt soweit so gut alles mit einem Motor funktioniert hatte (wenn auch mit weniger Drehzahl), habe ich 2 Motoren gleichzeitig getestet, und musste feststellen, das einer jetzt wieder stehen bleibt, aber einzeln läuft. Hab auch mal kurz Tests gemacht mit Mikroschritten bis 1/16, sieht gut aus, auch wenn ab und zu einfach der Motor nicht anläuft. aber grad zu wenig zeit um richtige Aussagen zu treffen.... Hab für heute Schnauze voll, und muss eh noch was anderes machen. teste morgen weiter. Danke nochmals an alle, komme voran, aber mit soviel Zeitaufwand hätte ich zu Anfang nicht gerechnet ! sehe grad noch im Bild einen Fehler, Kanal A bekommt natürlich auch Masse A und nicht C!
:
Bearbeitet durch User
Hi >wie schon erwähnt, die Massen der Oszikanäle sind getrennt. >Auch Potential-getrennt zur Masse Stromversorgung. Welches Oszi hast du? Das glaube ich erst wenn ich es gelesen habe. MfG Spess
spess53 schrieb: >>wie schon erwähnt, die Massen der Oszikanäle sind getrennt. >>Auch Potential-getrennt zur Masse Stromversorgung. > > Welches Oszi hast du? Das glaube ich erst wenn ich es gelesen habe. Nach den Bildern oben ein Tek. Bei der oben gezeigten Messung hätte es bei einem Oszi mit gemeinsamer Masse geschnalzt, und mit Sicherheit ein anderes Schirmbild gegeben, auf alle Fälle keine 48V Spannungshub bei 24V Versorgung.
Vielleicht hat der OP eines aus der TPS2000B Serie die hat tatsächlich bis zu vier differenzielle Eingänge. Ich wollte mir das drum schon mal zusätzlich zulegen, ehe man über 300 EUR für einen differentiellen Tatkopf zahlt, lieber gleich fürs doppelte ein ganze Oszi, nur gibts nicht so oft eines aus der Serie gebraucht und wenn i.A. deutlich teurer. Und von dem differentiellen Eingängen abgesehen ist der Rest nicht weiter spektakulär. Grüße Flo
:
Bearbeitet durch User
Hi >Vielleicht hat der OP eines aus der TPS2000B Serie die hat tatsächlich >bis zu vier differenzielle Eingänge. Ja, so weit war ich mittlerweile mit meiner Suche auch. MfG Spess
ja ein TPS 2024 sorry, hätte ich gleich mit dazuschreiben können... dann hättet ihr nicht Rätzeln müssen
:
Bearbeitet durch User
Udo Schlegel schrieb: > das versprochene Bild der Messanschlüsse. Da gibt es schon Schrittmotortreiber im 8-pol. Gehäuse ohne V++. Ich staune. Bei mir hat der TB6600HG viel mehr Pins und am Pin3 (TQ) läßt sich der Strom auf 30% absenken.
m.n. schrieb: > Da gibt es schon Schrittmotortreiber im 8-pol. Gehäuse ohne V++. Ich > staune. nein, das war ein Shema von mir lebst, habe auf die schnelle nichts gefunden, da ging es ja auch nur um das messen der Spulen. bisher habe ich keinen Pin erkannt der sowas machen soll in meinem Schaltplan stand da was von Spannung, habe jetzt durch dein Tip nach dem Pin 3 geschaut und 3 verschiedene Sachen gefunden: 1. TQ Drehmoment (Ausgangsstrom) Einstellung Eingangsstift 2. Spannungsverhältnis : L 30% H 100% 3. Drehmoment (Ausgangsstrom) Setzeingang ok klingt gut, danke für den Tip ich teste. Da wo sogar die Prozent zahlen mit angegeben sind steht Spannung... wie wizig. Ich habe den gekauft, dort ist der Pin 3 fest. Aber ist ja auch blöd, da meine Steuerung sowas nicht vorsieht. http://www.ebay.de/itm/TB6600-CNC-Single-Axis-0-2-5A-Two-Phase-Hybrid-Stepper-Motor-Driver-Controlle/201087638545?_trksid=p2054897.c100204.m3164&_trkparms=aid%3D222007%26algo%3DSIC.MBE%26ao%3D1%26asc%3D20140407115239%26meid%3D2f8863aeddf947e5b3d692cd1b4549f6%26pid%3D100204%26rk%3D3%26rkt%3D27%26sd%3D121556551343
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.