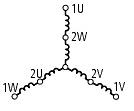
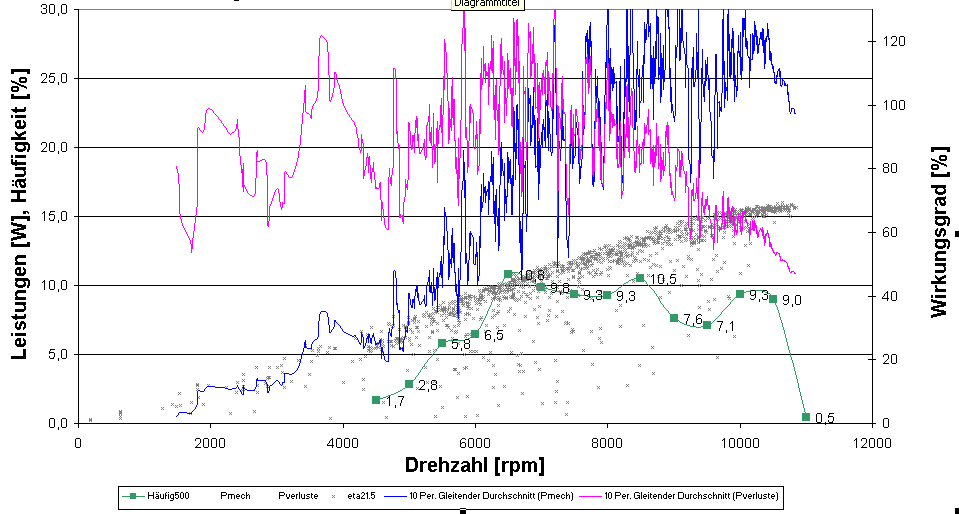
Für ein Wettbewerbsfahrzeug im Modellmaßsstab baue ich gerade den Antriebsstrang auf. Das Fahrzeug soll aus einer begrenzten Energiequelle (7VDC, 4A Dauer |7VDC 20A Kurzzeitig) in begrenzter Zeit möglichst oft einen dynamschen Rundkurs abfahren. Die grüne Linie im Diagramm beschreibt den Anteil des nach Drezahl gewichteten Energieverbrauches. Also wird knapp 50% der Energie in Drehzahlbereichen von <50% Wirkungsgrad investiert. Um die Wirkungsgrade im unteren Drehzahlbereich zu erhöhen wird der Modellbau-Brushless-Motor mit einer Wicklungsanzapfung versehen (insgesamt also 6 Motoranschlüsse) und eine kürzere Übersetzung gewählt. So entsteht ein schaltbares "Getriebe" mit dem 1. Gang an den Anschlüssen 1UVW und den 2.Gang an 2UVW. Versorgt wird der Motor via Modellbauregler. Dieser Regler muss nun abwechselnd auf 3 der 6 Motorspulen geschalten werden. Diese soll möglichst energiesparend (Spule und Kontaktwiderstand des Schalters) passieren. Also wenn möglich bistabil (engl latching), sodass nur für das Schalten Energie aufgewandt werden muss, nicht aber für das Halten.Geschalten wird etwa 2x pro 10 Sekunden. und ~ 250 Mal pro Tag. Je leichter desto besser. Unser Fahrzeug wiegt insgesamt 1kg, daher spielt das Gewicht des Schalters auch eine Rolle. Ich habe mich nach bistabilen 3xUM-Relais auf 5-7V DC Spulenspannung umgesehen, aber wenig gefunden, die AC (Syncronmotor) und Ströme bis 14A (maximaler Motorstrom) schalten können. Durch die Suchfunktion habe ich im Forum habe ich einige Beiträge über SSR (SolidStateRelais) gefunden und fand sie auch hilfreich, jedoch habe ich nichts hilfreiches über SSRs mit 3xUM (engl 3PDT)-Funktion gefunden. Zusätzlich müssten diese eine Non-Zero Switch-Funktion haben. Leider kenne ich mich mit Relais und SSR recht wenig aus und wäre sehr dankbar für Tipps, wie ich den Motor richtig schalten kann. loudspeaker
Angehängte Dateien:
Roland Romano schrieb: > So entsteht ein schaltbares "Getriebe" mit dem 1. Gang an den > Anschlüssen 1UVW und den 2.Gang an 2UVW. Verstehe ich recht: - kein echtes Getriebe - vorhandenes Getriebe wird mit kürzer Übersetzung ausgelegt - Schnellgang über 2UVW (die Anzapfung) - Langsamgang über 1UVW Damit das was bringt muss der Motor an sich niedriger drehen und auch größer ausgelegt werden. Ansonsten steht im Schnellgang deutlich weniger Leistung zur Verfügung. Größerer Motor bedeutet wiederum mehr Verluste. Lohnt der Ansatz?
Stephan H. schrieb: > - Schnellgang über 2UVW (die Anzapfung) Ganz einfach wirds wohl nicht und ob Deine Motorwicklung das temperaturmäßig verkraftet? Einige Pedelecs haben auch mit Überhitzung zu kämpfen. Mein Idee wäre daher an Pedelec-Front mal nach geeigneten Teilen/Schaltungen zu suchen.
Danke für die Antworten. Stephan H. schrieb: > Damit das was bringt muss der Motor an sich niedriger drehen und auch > größer ausgelegt werden. Ansonsten steht im Schnellgang deutlich weniger > Leistung zur Verfügung. Gibt es vielleicht ein Missverständnis, was "kürzere Übersetzung" bedeutet? Vielleicht kannst du das näher ausführen, was du meinst? - ich versuche mal blind darauf zu antworten: Die Drehzahlen vom Wirkungsgradoptimum bei ~10-11.000 rpm schiebe ich mit der kürzeren mechanischen Übersetzung nach links in die Region von 7000 rpm. Alle Wirkungsgrade bleiben gleich (eta der Übersetzung ändert sich etwas, aber kaum merkbar) Ich fahre also mit der kleineren Übersetzung und der Original-Wicklung eine langsamere Geschwindigkeit, diese dafür im höheren, effizienteren Drehzahlbereich. Durch das Umschalten auf den Motor mit weniger Wicklungen dreht dieser schneller und ich kann eine höhere Geschwindigkeit erreichen als mit dem "langsamen" Motor (nun die gleiche Geschwindigkeit wie mit dem Originalmotor an der alten, längeren Übersetzung). Nun aber auch mit guten Wirkungsgraden, da der untere Drehzahlbereich vom langsamen Motor (der im unteren Drehzahlbereich effizienter ist) abgedeckt wird. > Größerer Motor bedeutet wiederum mehr Verluste. Lohnt der Ansatz? Ein größerer Motor heißt nicht automatisch mehr Verluste insgesamt. das kommt stark auf den Betriebspunkt an. oszi40 schrieb: > Ganz einfach wirds wohl nicht und ob Deine Motorwicklung das > temperaturmäßig verkraftet? ... Danke für den Tipp. Motorwicklung passt; für beste Effizienz betreiben wir einen 250Wp-Motor bei eben 7V und 4A Dauer, also ~30W. > Mein Idee wäre daher an Pedelec-Front mal nach geeigneten > Teilen/Schaltungen zu suchen. Pedelec-Teile sind leider weit zu schwer und haben in der Regel keine Wicklungsumschaltung.
Ich denke ihr setzt an der falschen Stelle an. Eure Verluste sinken bei höheren Drehzahlen. Das ist ungewöhnlich. Anstatt den Motor zu frisieren schlage ich vor den Modellbauregler Aufmerksamkeit zu schenken. a) Die Ansteuerung der Motorphasen spezielle für eure Verwendung optimieren (Mosfets der B6 Brück im Motorregler unabhängig voneinander nach Nach Lage und benötigtem Drehmoment schalten) (mit altem Getriebe) b) Einen Hochsetzsteller verwenden und die Versorgungsspannung am Motorregler bei Bedarf für hohe Geschwindigkeiten erhöhen (mit neuem Getriebe) Grüße Felix
Roland Romano schrieb: > Das Fahrzeug soll aus einer begrenzten Energiequelle (7VDC, 4A Dauer > |7VDC 20A Kurzzeitig) in begrenzter Zeit möglichst oft einen dynamschen > Rundkurs abfahren. Bei den kleinen Spannungen verbrennt ihr wahrscheinlich viel an den unvermeidlichen Widerständen der Versorgung, angefangen beim Innenwiderstand des Akkus, den Kabeln, Schaltern, Sicherungen, Leiterbahnen, Lötstellen, den ohmschen Widerständen des Motors und den RDSon der FETs. Ich würd erstmal die Vergungsspannung kräftig erhöhen und den Strom entsprechend vermindern. MfG Klaus
Roland Romano schrieb: > Die Drehzahlen vom Wirkungsgradoptimum bei ~10-11.000 rpm schiebe ich > mit der kürzeren mechanischen Übersetzung nach links in die Region von > 7000 rpm. Roland Romano schrieb: > Ich fahre also mit der kleineren Übersetzung und der Original-Wicklung > eine langsamere Geschwindigkeit, diese dafür im höheren, effizienteren > Drehzahlbereich. Ok, ich hatte es dann richtig verstanden. Das mit dem an sich langsammer drehen war natüprlich Quatsch. Ihr ändert ja die mechanische Übersetzung. Roland Romano schrieb: > Danke für den Tipp. Motorwicklung passt; für beste Effizienz betreiben > wir einen 250Wp-Motor bei eben 7V und 4A Dauer, also ~30W. Der sollte dann auch bei "halbierter" Wicklung noch reichen. Ich würde aber auch eher bei Betriebsspannung und Steller ansetzen. Evtl. auch beim Motor: Ihr kommt bei max-Drehzahl ja kaum am Wirkungsgrad-Maximum (so bei 25% des Nennstroms) vom Motor an. Und der Wirkungsgrad ist dann normalerweise bis deutlich über 50% des Nennstroms sehr gut. Unter 15-20% des Nennstroms ist der dagegen eher mau. Größere Motoren müssen zwar nicht zwangsläufig mehr Leerlaufverluste haben, meistens ist es aber so.
Felix W. schrieb: > Ich denke ihr setzt an der falschen Stelle an. Eure Verluste sinken bei > höheren Drehzahlen. Das ist ungewöhnlich. Nein ist es nicht. Wenn du einen BL-Motor bei Nennspannung unterhalb der Drehzahl mit dem optimalen Wirkungsgrad betreibst, so steigen die ohmschen Verluste, der Wirkungsgrad sinkt. Felix W. schrieb: > Mosfets der B6 Brück im Motorregler unabhängig voneinander > nach Nach Lage und benötigtem Drehmoment schalten Kannst du genauer beschreiben, was du meinst? Modellbauregler schalten ja in Abhängigkeit der Rotorlage (inkl. einstellbarem Timing) und passen den Tastgrad an den Motorphasen dem über das Servokabel vorgegeben Wert an. Klaus schrieb: > Bei den kleinen Spannungen verbrennt ihr wahrscheinlich viel an den > unvermeidlichen Widerständen der Versorgung, ... Ganz richtig. insbesondere wenn es um starke Beschleunigungen in den unteren Drehzahlbereichen geht, dann dominieren dort die ohmschen Verluste. Diese kann man durch Widerstandsreduktion begegnen -> machen wir im gesamten Antriebsstrang. Felix W. schrieb: > Einen Hochsetzsteller verwenden .... Klaus schrieb: > Ich würd erstmal die Vergungsspannung kräftig erhöhen > und den Strom entsprechend vermindern. Danke für die Tipps, einen BoostConverter haben wir bereits in Betracht gezogen. Damit keine Verzögerung bei der Beschleunigung entsteht müsste dieser aber ohne oder nur mit kleinem Speicher vorm Regler arbeiten. Somit müsst er die Pmax des Motors schalten können und wäre leider zu groß und schwer, um ihn verwenden zu können. Unser Fahrzeug wiegt knapp 1kg. Zusätzlich müsste der höhere Leerlaufstrom (wg. höherer Drehzahl) auch hochgesetzt werden und verursacht somit ein Vielfaches an Leerlaufverlusten. Diese könnte man verkleinern, indem man einen Motor mit niedrigerem Kv wählt. Niedriges Kv bedeutet aber mehr Wicklungen -> Motorwiderstand steigt. -> Gewicht steigt. Beispiel: im optimalen Betriebspunkt (7V, 5,5A) haben wir derzeit etwa 6W Leerlaufverluste (7Vx0,9A) und 5W ohmsche Verluste wenn ich im selben Drehzahlbereich bleiben will, dann kann ich einen Motor mit weniger Kv verwenden. nehmen wir den Faktor 1,5 für alle Motorgrößen (Ri, Kv, I0) als Rechenbeispiel. aus 7V und 5,5A werden 10,5V und 3,7A mit einem niedrigeren Kv sinkt mein Leerlaufstrom auf 0,6A (kleines Kv steigert Km), ich muss diese 0,6A allerdings von 7V hochstellen, also habe ich im 7V-Niveau weiterhin 0,9A als Leerlaufstrom. Meine Ohmschen Verluste bleiben bei 5 W (Ri größer, aber kleiner Strom) nunja. wie man sieht ändert eine reine Umstellung auf weniger Strom, mehr Spannung nicht grundlegend etwas, sondern hebt nur den Spitzenwirkungsgrad (ein E-Motor in einem Fahrzeug wird selten an einem einzigen Betriebspunkt gefahren) Wirkliche Verbesserungen sind nur durch wesentlich größere Motoren möglich. (mehr Kupfer heißt weniger Widerstand) Da sind aber auch Grenzen aufgrund des Gewichtes und irgendwann nehmen auch die Leerlaufverluste weiter zu. Stephan H. schrieb: > Ihr kommt bei max-Drehzahl ja kaum am > Wirkungsgrad-Maximum (so bei 25% des Nennstroms) vom Motor an. doch. und sogar ziemlich genau. Beim Wirkungsgrad muss man auch Kabel, regler etc. berücksichtigen, und bei 0,150 Ohm Innenwiderstand, 1780 rpm/V Drehzahlkonstante, 6,9V Betriebsspannung und 0,9A Leerlaufstrom ist einfach nicht mehr als 75% eta drinnen. Stephan H. schrieb: > Größere Motoren müssen zwar nicht zwangsläufig mehr Leerlaufverluste > haben, meistens ist es aber so. bei kleinen Modellbaumotoren wie wir sie verwenden ist es genau umgekehrt. Viele dieser Motoren erzeugen ihre Leistungen über sehr hohe Drehzahlen. Dadurch steigen die Leerlaufverluste in die 50Watt oder mehr! Wir konnten dem entgegenwirken, indem wir einen größeren Motor gewählt haben, der mehr Windungen hat und konnten so die Leerlaufverluste auf 5W drücken. Wenn man den Motor noch größer Macht und noch niedrigere Kv angeht, so steigen die Verluste wieder durch größere Lager/Bauform bzw. machen die niedrigeren kV eine längere Übersetzung nötig, was die ohmschen Verluste in die Höhe treibt. In der Zwischenzeit habe ich einen Testaufbau mit drei kleinen Kippschaltern 1xUM gemacht. j´Jeder kann 6A und 125VAC. die Kontakte schalten zuverlässig, auch unter Last von 10A. Der nächste Schritt wird sein, die Schalter zu zerlegen und Kontakte anzuschauen bzw. deren Kontaktwiderstand zu messen. Leider kamen bisher kaum Vorschläge zum Schalten der Phasen. Falls die mechanschen Schalter gut funktionieren, bleiben wir vielleicht dabei. leicht und günstig sind sie jedenfalls. loudspeaker
:
Bearbeitet durch User
Roland R. schrieb: >> Ich denke ihr setzt an der falschen Stelle an. Eure Verluste sinken bei >> höheren Drehzahlen. Das ist ungewöhnlich. > Nein ist es nicht. Wenn du einen BL-Motor bei Nennspannung unterhalb der > Drehzahl mit dem optimalen Wirkungsgrad betreibst, so steigen die > ohmschen Verluste, der Wirkungsgrad sinkt. Das ist klar. Nur müsste dann die Stromaufnahme und die Wirkleistung erst mal deutlich sichtbar ansteigen. Strom für die halbe Drehzahl (bei gleicher Spannung) so auf das 5-fache. Das seh ich nur ansatzweise im Bereich von 10-11 kUPM. Erklärbar wird das ganze erst durch die PWM im Regler. Ergibt zusammen mit der Motorinduktivität einen Tiefsetzsteller: Ohmscher Widerstand ca. 0.2 Ohm. (aus 5W ohmsche Verluste bei optimalem Betrieb) 40W bei 6000Upm wären 5,7A@7V oder 6,5W. PWM 60% on macht ca. 9,5A in den Motorwicklungen. Wären dann 18W ohmsch. Passt in etwa zu deinen Messungen. .. und hat mich selber überrascht. Die Wicklungsumschaltung oder ein echtes Getriebe sind wohl der einzige Weg auch bei halb geöffnetem Regler nen guten Wirkungsgrad zu erreichen. Alternativ: kleinerer Wicklungswiderstand Roland R. schrieb: >> Bei den kleinen Spannungen verbrennt ihr wahrscheinlich viel an den >> unvermeidlichen Widerständen der Versorgung, ... > Ganz richtig. insbesondere wenn es um starke Beschleunigungen in den > unteren Drehzahlbereichen geht, dann dominieren dort die ohmschen > Verluste. Diese kann man durch Widerstandsreduktion begegnen -> machen > wir im gesamten Antriebsstrang. Scheint mir hauptsächlich im Motor (und auch im Regler) zu liegen. Die Zuleitungsverluste dürften kaum relevant sein (bzw. mindestens unter 9000 UPM fallend sein). P.S.: Die mechanische Leistung im Diagramm ist an der Welle gemessen und nicht irgendwie aus Leerlaufmessung, Lastmessung und Datenblättern ausgerechnet, richtig?
Stephan H. schrieb: > Erklärbar wird das ganze erst durch die PWM im Regler. Ergibt zusammen > mit der Motorinduktivität einen Tiefsetzsteller: > Ohmscher Widerstand ca. 0.2 Ohm. (aus 5W ohmsche Verluste bei optimalem > Betrieb) > 40W bei 6000Upm wären 5,7A@7V oder 6,5W. > PWM 60% on macht ca. 9,5A in den Motorwicklungen. Wären dann 18W ohmsch. > Passt in etwa zu deinen Messungen. da hast du einen guten Punkt getroffen. Während des Rennens variiert die Gasstellung ja laufend. Diese hab ich nicht mitgemessen :/ - Das ist wichtig und werde ich bei der nächsten Messfahrt verkabeln. Danke. > .. und hat mich selber überrascht. Die Wicklungsumschaltung oder ein > echtes Getriebe sind wohl der einzige Weg auch bei halb geöffnetem > Regler nen guten Wirkungsgrad zu erreichen. > Alternativ: kleinerer Wicklungswiderstand ja, zu dem Schluss bin ich auch gekommen. alternativ könnte man auch die Versorgungsspannung variieren, aber das kommt für uns gewichtsmäßig nicht in Frage. auch ein kleiner Wicklungswiderstand hilft hier nur nur mit einem sehr kleinen Hebel. Damit die Ohmschen Verluste nicht explodieren muss man irgendwann in den Strombegrenzerbetrieb wechseln. Ab da sinkt die mech. Leistung linear bis zum Stillstand. Um die verluste so klein zu halten und die Effizienz so hoch zu halten, wie man sie mit Wicklungsumschaltung erreicht müsste man den Innenwiderstand extrem klein gestalten, was einen extrem schweren Motor mit sich bringt. > Scheint mir hauptsächlich im Motor (und auch im Regler) zu liegen. Die > Zuleitungsverluste dürften kaum relevant sein (bzw. mindestens unter > 9000 UPM fallend sein). Ich habe (noch) Steckverbindungen zwischen Motor und Regler drinnen. diese machen auch einige mOhm aus. Der Regler für diese Dummy-Fahrt aus dem Diagramm war auch ein Reely 30A regler mit vergleichsweise hohem RDSon. Da liegst du wahrscheinlich richtig. Die Zuleitung ist sicher auch nicht zu unterschätzen, denn hier war Lipo+Datenlogger+Adapter+Reglerstecker (=Tamiya :/) verbaut, was sicher die Zuleitungsverluste maximiert hat. ToDo also: Testfahrt mit reduziertem Widerstand in allen Verbindungen und Gasstellung mitloggen. > P.S.: Die mechanische Leistung im Diagramm ist an der Welle gemessen und > nicht irgendwie aus Leerlaufmessung, Lastmessung und Datenblättern > ausgerechnet, richtig? der Motor wurde am Prüfstand mit diesem Regler-Setup getestet. die komplette Kennlinie. Darauf aufbauend mit Ri,Kv und I0 eine Kennlinie gebastelt, die ziemlich genau diesem Motor entspricht. Bei der Testfahrt selbst konnte ich die Wellenleistung (natürlich) nicht messen (Maßstab 1:10) und musste sie anhand der Kennlinie berechnen. Der Teillastbetrieb ging dabei allerdings verloren, da dies nicht mitgeloggt wurde. Daher ist obiges Diagramm verfälscht und muss mit neuer Messfahrt neu erstellt werden. Danke für die Tipps, Leute. Es freut mich, dass manche die Motorentechnik echt durchschauen und so kompetente Hinweise geben können. Die helfen echt weiter!
loudspeaker schrieb: > Die Zuleitung ist sicher auch nicht zu unterschätzen, denn hier war > Lipo+Datenlogger+Adapter+Reglerstecker (=Tamiya :/) verbaut, was sicher > die Zuleitungsverluste maximiert hat. So viel kanns auch nicht sein. Motor @ Optimum - 34W Gesamtleistungsaufnahme (inkl. Regler) = 7V, 4,85A - bei 5W ohmschen Verlusten an dem Punkt ist das ein Gesamtwiderstand von 0.21Ohm 0.15Ohm hat die Wicklung (mit/ohne Leitverlusten im Regler erst mal egal); bleiben max. 60 mOhm für die Zuleitungskonstruktion. Verhältnis 3:1 Die gemessenen 40W Leistungsaufnahme bei 6000Upm wären 5,7A@7V auf der Zuleitung, oder 1.95W. Durch die PWM von 60% werdens in der Motorwicklung/den Regler-Fets 9,5A. Bei 150mOhm sind das 13,5W. Verhältnis 7:1 Variable Versorgungsspannung bringt auch nicht soo viel. Für das derzeitige Drehmoment/die Leistung bei z.B. 6000UPM braucht der Motor halt die 9,5A und hat mit dem Wicklungswiderstand auch die 13,5 Verluste. Du könntest lediglich die Verluste im Regler (häufigere Schaltvorgänge) reduzieren. Die kommen zu obiger Rechnung bei halboffenem Regler nämlich noch dazu. Und da gibt's gute und schlechte Regler. Hier mal ein Eindruck: http://www.umfc-gnas.at/mediabase/docs/Dokument-18.pdf In dem Test war die Last immer ein Propeller, niedrigere Drehzahl ist da immer niedrigeres Drehmoment und weniger Motorstrom (halbe Drehzahl = 1/8 Leistung). Der Gaslevel wird so grob mit dem generierten Schub zusammenpassen (50% Gas = 50% Schub = 70.7% Drehzahl).
Danke für die Ausführungen, Stephan. wie gesagt sehr hilfreich. Den Bereich der Teillast habe ich bisher noch nicht näher betrachtet, aber das verlinkte Doc hat mich auf zwei Ideen gebracht, die ich mit Datenlogger und Prüfstand verifizieren kann. Durch die Wicklungsanzapfung umschiffe ich diesen Bereich elegant, da ich mehr Zeit in Vollast fahren kann und den Strombegrenzer-Betrieb (in Gedanken durch Nachlassen der Gasstellung) eher vermeiden kann. In unserem Fahrezeug tritt der Teillastbetrieb auch meist bei niedrigerer Drehzahl und geringerem Moment (Zwischengas in Kurvenfahrt) aber auch bei niedriger Drehzahl und hohen Momenten (Beschleunigungen) auf. Zu welchen Teilen am Gesamtenergieverbrauch kann ich erst nach neuerlicher Messung sagen. stay tuned :)
:
Bearbeitet durch User
loudspeaker schrieb: > der Motor wurde am Prüfstand mit diesem Regler-Setup getestet. die > komplette Kennlinie. Darauf aufbauend mit Ri,Kv und I0 eine Kennlinie > gebastelt, die ziemlich genau diesem Motor entspricht. > > Bei der Testfahrt selbst konnte ich die Wellenleistung (natürlich) nicht > messen (Maßstab 1:10) und musste sie anhand der Kennlinie berechnen. Hmm. Was habt Ihr in welchem Setup gemessen? Was ist wie berechnet und was ist im Diagramm genau dargestellt? Messung Motorkennlinie - Leerlaufstrom? - Strom bei unterschiedlichen Belastungen (mech.)? - Spannung vmtl. immer 7V? - Regler immer auf Vollgas oder auch gedrosselt? Messung im Betrieb - Gesamtstrom? - Motorstrom nach dem Regler? - Akkuspannung? - Drehzahl? Diagramm - Stromkurven schauen so aus als hättet ihr den Gesamtstrom nach aktuellem Wirkungsgrad auf mech./Verlust aufgeteilt und dann gemittelt. - Die Kreuze versteh ich gar nicht. Warum gibt's da Ausreißer z.B. bei 6kUPM bis fast an null? Nach den Stromkurven hätte ich vermutet ihr macht Drehzahl > Eta, aber dann müssten die Kreuze doch auf einer glatten Kurve liegen, oder? kurzum: Wie kommt ihr auf den aktuellen Wirkungsgrad? Von der Drehzahl nicht sinnvoll, da Fehler beim Beschleunigen/Bremsen. Vom Gesamtstrom auch nicht sinnvoll, da dito. und die echte Spannung am Motor und der echte Motorstrom vmtl. nicht erfasst. So als Anregung: Einen virtuellen Sternpunkt am Motor bilden (3*4,7k + Kondensator) und die echte Motor-Betriebsspannung (x2) mitloggen. Das sollte einfacher sein und bessere Daten liefern als das Steuersignal für den Regler. Dann den Motor an den Prüfstand und Kennlinie Regler+Motor bei verschiedenen Regleröffnungen (echten Motor-Betriebsspannungen) ermitteln. Die Behandlung des implizierten Tiefsetzsteller mag ich grad nicht durchdenken, ist aber wichtig und die direkte Messung wäre am besten. Auch der Eingangskondensator am Regler kann das Ergebnis verfälschen. Die Differenzierung zwischen 6.5V Akkuspannung=Motorspannung und 7V Akkuspannung mit 6.5V Motorspannung (Regleröffnung) dabei nicht vergessen. Akkuspannung wäre dabei genauer noch Regler-Eingangsspannung, ist aber vmtl. nicht relevant. Dann halt auf die Strecke. Ich denke das beste Wirkungsgrad-Matching zur Motor-Kennlinie bekommst du über die echte Motorspannung (implizierter Tiefsetzsteller) und den echten Motorstrom (hilfsweise berechnet aus Gesamtstrom, Akkuspannung, Motorspannung und Reglerkennlinie). Ich vermute das Diagramm sieht dann deutlich anders aus. Eine Darstellung nach Motorspannung (= Ziel-Drehzahl) auf der X-Achse wäre vmtl. passend. Wenn die Motor-Regler-Charakteristik erst mal korrekt abgebildet ist kann man auch besser beurteilen was sinnvoll ist. Eine zeitliche Darstellung über eine Runde würde bestimmt auch helfen.
Angehängte Dateien:
-

Strecke_benannt_fuer_Analyse.PNG
92 KB -

Runden_Verlauf.png
7,7 KB -

Teststand.png
11 KB
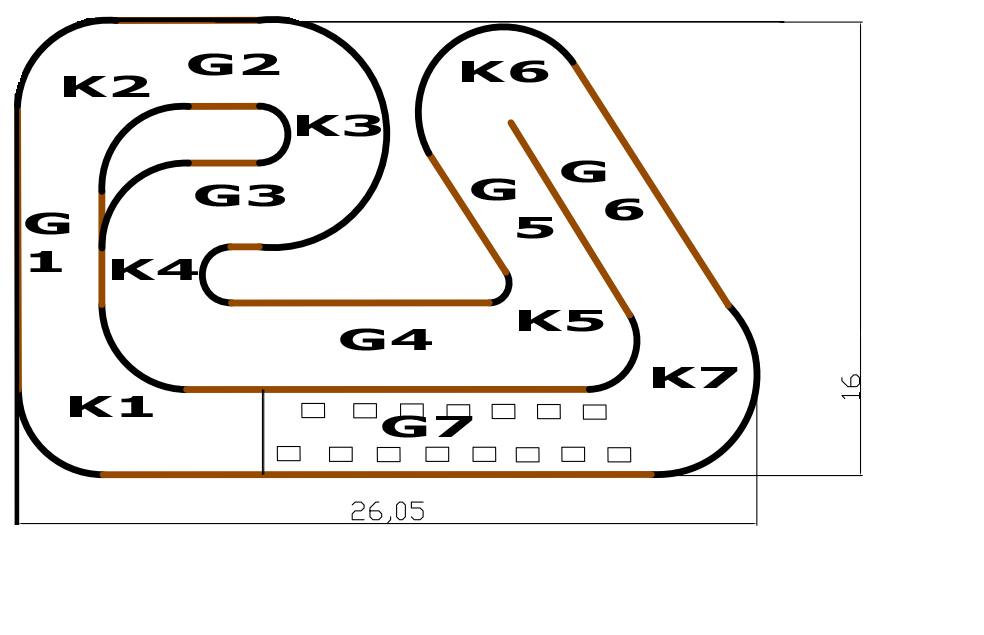
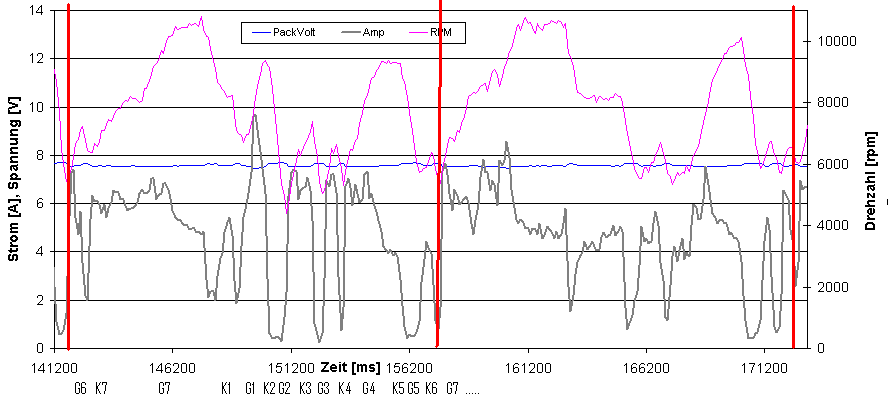
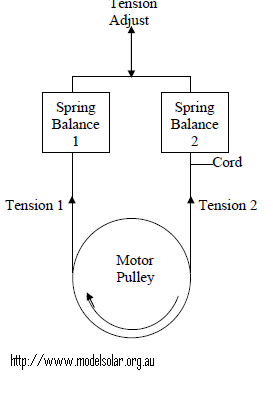
Stephan H. schrieb: > Eine zeitliche Darstellung über eine Runde würde bestimmt auch helfen. dies gleich zuerst. anbei eine Rundkursskizze und ein Rundenverlauf. Ganz unten im Diagramm habe ich die Kurven und Geraden inetwa markiert. Du hast da einige gute Punkte dargelegt, Stefan, die ich im Detail durchgehen möchte; alles kann ich dir heute mangels Wissen (noch) nicht beantworten. Vielleicht kannst du mir da auf die Sprünge helfen. Stephan H. schrieb: > Messung Motorkennlinie > - Leerlaufstrom? > - Strom bei unterschiedlichen Belastungen (mech.)? > - Spannung vmtl. immer 7V? > - Regler immer auf Vollgas oder auch gedrosselt? - Ja, Leerlaufstrom gemessen. - Strom wurde bei unterschiedlichen Momenten und daher Drehzahlen gemessen. mit einem Aufbau dieser Art (siehe Anhang Teststand) - Versorgungsspannung 7V, ja. - Regler auf Vollgas Die Kennlinien waren sehr gut reproduzierbar und passten gut in die berechneten Kennlinien. (einfache Modellierung mit Ubat = rpm/Kv + Ri*Ibat) Stephan H. schrieb: > Messung im Betrieb > - Gesamtstrom? > - Motorstrom nach dem Regler? > - Akkuspannung? > - Drehzahl? - Gesamtstrom am Reglereingang (EagleTree Datenlogger) - Motorstrom nach dem Regler nicht gemessen - Akkuspannung am Reglereingang gemessen - Drehzahl mit Sensor an einer Motorphase gemessen. Stephan H. schrieb: > - Stromkurven schauen so aus als hättet ihr den Gesamtstrom nach > aktuellem Wirkungsgrad auf mech./Verlust aufgeteilt und dann gemittelt. .... was natürlich nur bei Teillast gemacht werden darf. Daher stimmt das Diagramm so nicht mehr. Das war eine wichtige Erkenntnis gestern! Stephan H. schrieb: > - Die Kreuze versteh ich gar nicht. Warum gibt's da Ausreißer z.B. bei > 6kUPM bis fast an null? Nach den Stromkurven hätte ich vermutet ihr > macht Drehzahl > Eta, aber dann müssten die Kreuze doch auf einer > glatten Kurve liegen, oder? Wenn wir immer Volllast fahren, dann hast du Recht. Der Teillast-Betrieb erzeugt aber komplett andere Wirkungsgrade und somit keine glatte Kurve. Stephan H. schrieb: > kurzum: Wie kommt ihr auf den aktuellen Wirkungsgrad? > Von der Drehzahl nicht sinnvoll, da Fehler beim Beschleunigen/Bremsen. > Vom Gesamtstrom auch nicht sinnvoll, da dito. und die echte Spannung am > Motor und der echte Motorstrom vmtl. nicht erfasst. Folgende Formel ist hinterlegt: Wirkungsgrad = Pmech/Pel = n*M / Umess*Imess = n*Imess*Km / Umess*Imess Km = Drehmomentkonstante in Nm/A Somit sieht man in den Daten auch die Fehler von Beschleunigung und Bremsen. Die echte Motorspannung und der echte Motorstrom wurde wie du richtig sagst nicht erfasst und ist in der Teillast sicher ein anderer als in der Messung :/ Ich würde gerne die echten Motorwerte ermitteln, um das Diagramm richtig darzustellen und dann richtig zu entscheiden. Dazu stehen mir Standard-Elektronikbauteile und ein Arduino mit ATMega328 sowie ein EagleTree Logger zur Verfügung Du schreibst: > Einen virtuellen Sternpunkt am Motor bilden (3*4,7k + Kondensator) und > die echte Motor-Betriebsspannung (x2) mitloggen. Das sollte einfacher > sein und bessere Daten liefern als das Steuersignal für den Regler. Den Sternpunkt kann ich leicht nachbilden, den Kondensator (47µF z.B. hab ich da) hänge ich zwischen Sternpunkt und Minuspol der Batterie, um das Potential zu stablisieren. Und dann die Spannung der Phasen vom Sternpunkt aus messen? Einfacher ist das nicht, denn das Regler-Steuersignal kann ich am Logger anstecken und automatisch loggen. Genauer aber jedenfalls. Wenn ich dann gleichzeitig die Reglereingangsspannung, Reglereingangsstrom und Drehzahl messe, so kann ich auf den Motorstrom rückschließen. Damit dann auch auf den Wirkungsgrad rückschließen, wenn mir die Motorwirkungsgrade bei anderen Versorgungsspannungen bekannt sind, oder? Wie wesentlich sind die Teillastverluste an Reglern im mittleren Preissegment insgesamt? laut Literatur sind diese im Vergleich zum Motorwirkungsgrad eher zweitrangig. Wenn dies den Wirkungsgrad nicht wesentlich verzerrt würde ich die Ermittlung der Regler-Kennlinie aus Zeitgründen gerne auslassen. Wie schätzt du das ein?
Roland R. schrieb: > In der Zwischenzeit habe ich einen Testaufbau mit drei kleinen > Kippschaltern 1xUM gemacht. j´Jeder kann 6A und 125VAC. die Kontakte > schalten zuverlässig, auch unter Last von 10A. Der nächste Schritt wird > sein, die Schalter zu zerlegen und Kontakte anzuschauen bzw. deren > Kontaktwiderstand zu messen. > > Leider kamen bisher kaum Vorschläge zum Schalten der Phasen. Falls die > mechanschen Schalter gut funktionieren, bleiben wir vielleicht dabei. > leicht und günstig sind sie jedenfalls. Miss mal den Kontaktwiderstand der Schalter, bzw. von gesunden Beispiel-Relais. (realistische 4A durchjagen und Spannungsabfall messen) 2*Kontaktwiderstand + Widerstand der verkürzten Wicklung könnte höher liegen als die volle Wicklung ohne Relais. + höhere Leerlaufverluste durch höhere Nenndrehzahl > schlechterer Wirkungsgrad. Im 60% Szenario (5,7A@7V, 9,5A@Motor) bringts ziemlich sicher was, auch wenn Kontaktwiderstände + höhere Leerlaufverluste nen guten Teil wegfressen. Dann noch das zusätzliche Gewicht durch die Relais, da ist dann auch schnell der schwerere Motor drin... Freilaufdioden gehen nicht, Snubber bringt im 2. Gang laufend Verluste (2. Wicklungsteil ist Generator), ohne bringt schnellen Kontaktverschleiß. Der Motor hat Sensoren? Ansonsten kommt die Kummutierung evtl. beim Umschalten/Prellen manchmal komplett durcheinander. Manch ein sensored Regler mag eine Umschaltung auch gar nicht vertragen. Standard-SSR für 50Hz werden ziemlich sicher auch nicht funktionieren. Es müssten schon 6*2 antiserielle Mosfets sein - mit floatendem Source-Potential. Auch die bringen natürlich wieder etwas Verluste (mindestens 4 Fets im Strompfad). Bräuchte vmtl. auch einen Snubber was auch Verluste bringt. Versorgungsspannung variieren ist auch so ne Sache. Zusätzliche Verluste im Boost/Buck/Sepic-Wandler, und gängige ESCs werden das kaum tolerieren. Unter so 6V funktionieren die dann gar nimmer (Gate-Aufsteuerung, MC-Versorgung, ...). Ein speziell entwickelter Regler könnte sicher ein paar der Mosfets sparen, Versorgungsspannungsänderungen tolerieren, die optimale PWM-Frequenz für euch haben, ... Ist aber auf Monatssicht (Vollzeit) bei weitem nicht machbar. Ich würde: - Messdaten prüfen/verbessern - Relevanz des Modellgewichts für die Performance klären - Optionen zur Wicklungsumschaltung neu bewerten (Gewicht, Stabilität, Wirkungsgrad) - alternative Regler suchen - alternative Motoren wechseln
Roland R. schrieb: > anbei eine Rundkursskizze und ein Rundenverlauf. > Ganz unten im Diagramm habe ich die Kurven und Geraden in etwa markiert. Danke. Das schaut schon mal ganz plausibel aus. Roland R. schrieb: > Strom wurde bei unterschiedlichen Momenten und daher Drehzahlen > gemessen. Ok. Ist Standard. Die Drehzahl ändert sich dabei aber nur relativ wenig. Auf halbe Leerlaufdrehzahl runtergebremst wird er langsam geben. (7V Betriebsspannung, 3,5V innere Spannung mach gute 23A Strom) Roland R. schrieb: > Wirkungsgrad = Pmech/Pel = n*M / Umess*Imess = n*Imess*Km / Umess*Imess Passt so nicht zum Diagramm. Imess kürzt sich raus und der Wirkungsgrad wäre (bei konstanter Spannung) konstant. Die Formel könnte aus der einfachsten "Drehmoment aus Strom"-Formel weiterentwickelt sein. Die nimmt aber einen konstanten Wirkungsgrad an ;) Das müsste eher so sein: Pmech = Konstante innere Spannung (Strom - Leerlaufstrom @ aktueller Drehzahl) Strom ist der Motorstrom, nicht der Akkustrom. Innere Spannung ist "im Motor", praktisch die Klemmenspannung - R*Motorstrom. Pmech = a*(Umotorklemme - R*Imotor) * (Imotor - Ileerlauf@n) oder: Pmech = a*(n/kv) * (Imotor - Ileerlauf@11000/n) Der Leerlaufstrom bei der aktuellen Drehzahl ist in der letzten Gleichung halt nur grob. Roland R. schrieb: > Den Sternpunkt kann ich leicht nachbilden, den Kondensator (47µF z.B. > hab ich da) hänge ich zwischen Sternpunkt und Minuspol der Batterie, um > das Potential zu stablisieren. Und dann die Spannung der Phasen vom > Sternpunkt aus messen? > Einfacher ist das nicht, denn das Regler-Steuersignal kann ich am Logger > anstecken und automatisch loggen. Genauer aber jedenfalls. So in etwa. Nur den Kondensator halt über Widerstände an die 3 Phasen. Das beste wäre den Motorstrom zu messen. Dann bräuchtest du die Spannung gar nicht, bzw. nur um den Regler besser zu beobachten. (siehe oben) Praktisch gebaut hab ich das alles aber auch noch nicht ... Probier gerne das Reglersignal. Da ist halt wieder die Frage wieviel % Reglersignal welche Motorspannung bedeutet, wie schnell der Regler das Signal weitergibt und wie direkt er das macht (Sprung/Rampe). Roland R. schrieb: > Wenn ich dann gleichzeitig die Reglereingangsspannung, > Reglereingangsstrom und Drehzahl messe, so kann ich auf den Motorstrom > rückschließen. Damit dann auch auf den Wirkungsgrad rückschließen, wenn > mir die Motorwirkungsgrade bei anderen Versorgungsspannungen bekannt > sind, oder? Das wär der Plan. Oder noch besser eben den Motorstrom messen. Die Kennlinie wird vmtl. schon taugen.
Stephan H. schrieb: > Ich würde: > - Messdaten prüfen/verbessern > - Relevanz des Modellgewichts für die Performance klären > - Optionen zur Wicklungsumschaltung neu bewerten (Gewicht, Stabilität, > Wirkungsgrad) > - alternative Regler suchen > - alternative Motoren wechseln guter Plan. Eines kann ich schon jetzt beantworten: Das Modellgewicht zählt mit der verfügbaren Energiemenge und dem Wirkungsgrad des Antriebsstranges zu den Top 3 Auslegungskriterien. Stephan H. schrieb: > Roland R. schrieb: >> Wirkungsgrad = Pmech/Pel = n*M / Umess*Imess = n*Imess*Km / Umess*Imess > Passt so nicht zum Diagramm. Richtig, da habe ich die Formel falsch abgetippt. So steht sie tatsächlich im xls: (I) Wirkungsgrad = Pmech/Pel = n*M / Umess*Imess = n*(Imess-I0)*Km / Umess*Imess I0 haben wir derzeit als konstant drinnen, wäre aber besser ihn in Abhängigkeit der Drehzahl zu ermitteln oder linear anzunehmen, wie du richtig schreibst. Den Wirkungsgradabfall nach links erkläre ich mir so: Bei niedrigeren Drehzahlen war der Pilot angewiesen, "langsam Gas zu geben", um durch Teillastbetrieb den Motorstrom zu begrenzen. In der Formel (I) oben wird dies aber nicht berücksichtigt, denn der Datenlogger misst Batteriespannung und Reglerstrom. Nur bei Vollast darf man den Reglerstrom als (fast) Motorstrom annehmen. Daher wurde der Motorstrom systematisch unterschätzt, daher auch das Motormoment komplett falsch. Bei Vollast und höheren Geschwindigkeiten (rechts im Diagramm) passen die Werte meiner Meinung nach, nur weiter links dann nicht mehr. "Wer Mist misst, misst Mist" bewahrheitet sich mal wieder ... Du hast mir mit deinen Inputs schon sehr geholfen, ich habe sie ein bisschen modifiziert und mit Größen versehen, die ich auch praktisch messen kann. Der Motorstrom wird schwer, da ich nichtmehr zum Sternpunkt dazukomme. Daher Motorspannung. > (II) Pmech = (n/kv) * (Iphase - Ileerlauf@11000/n) > (III) Iphase= Iakku * Uakku/Uphase somit werde ich die Testfahrten nocheinmal machen. Akkuspannung, Akkustrom, Drehzahl, Leerlaufstrom, Phasenspannung und Regleröffnung (Servosignal) messen. Die Regleröffnung nur als Redundanz. dann in diese Gleichungen aus (II) und (III) einsetzen: > (IV) Pmech = (n/kv) * (Iakku*Uakku/Uphase - Ileerlauf@11000/n) > (V) Pel = Uphase * Iakku*Uakku/Uphase So, jetzt stellt sich die Frage nach der Umsetzung. Beim Überlegen fiel mir auf, dass mein ATM328 nur Spannungen von 0-5V messen kann. Nun kam mir die Idee, auf einen Sternpunkt zu verzichten und einfach zum Minuspol der Batterie als Referenz zu messen. Zwischen Phase und Referenz bräuchte ich einen Spannungsteiler, der mir die 7V auf 5V übersetzt. Somit müsste ich am µC-Pin einen solchen Spannungsverlauf an den 3 Phasen messen können. https://www.mikrocontroller.net/articles/Datei:BLDC_Spannungs_Diagramm.png Referenz werde ich an den Minuspol der Batterie klemmen. * Akkuspannung mittels Spannungsteiler von 7V auf 5V übersetzten. * Akkustrom mit ACS712-20A in der Minusleitung messen (Stromsensor bis 20A) * Drehzahl mithilfe des EagleTree-RPM-Sensors einlesen (http://diydrones.com/xn/detail/705844:Comment:678893) * Leerlaufstrom ... selbsterklärend * Phasenspannung mit Spannungsteiler messen. So gesehen halte ich das ganze für machbar, habe aber noch Unklarbeiten bezüglich der Signalverarbeitung: *Wie oft soll ich die Spannung abtasten? mit 16MHz geht das nicht unendlich oft. *Brauche ich eine RC-Kombination, um die Regler-PWM auszublenden? wenn ja, welche Bauteilgrößen? *Ich werde alle 3 Phasenspannungen in Referenz zum -Pol der Batterie messen; wie komme ich da am besten zu meinem Uphase?
{kind=link}
loudspeaker schrieb: > *Ich werde alle 3 Phasenspannungen in Referenz zum -Pol der Batterie > messen; wie komme ich da am besten zu meinem Uphase? Ne, ich würd den "virtuellen Sternpunkt nehmen". so wie in dem Artikel den du Schon gefunden hast: https://www.mikrocontroller.net/articles/Datei:BLDC_BEMF_schaltung.png Ausgang "Mittel" Ergebnis: https://www.mikrocontroller.net/articles/Datei:BLDC_Oszillogramm_BEMF_richtig.png (Cyan-Kurve) Der braucht auf jeden Fall einen Tiefpass. Mit etwas Glück reicht die Genauigkeit nach kräftigem RC-Filtern. Abtastfrequenz musste ausprobieren. Einfach mal mit dem Oszi schauen wie schnell sich Spannung bei Wechseln Voll-/Halbgas ändert. 1-2kHz sollten auch mit digitalem Filtern reichen. Der Regler bekommt ja nur alle 20ms ein Update von der Fernbedienung. loudspeaker schrieb: > (I) Wirkungsgrad = Pmech/Pel = n*M / Umess*Imess > = n*(Imess-I0)*Km / Umess*Imess Ok. Das erklärt die Wirkungsgrade nahe null. Die sind dann beim Abbremsen entstanden. Aber: Im Ausgangsdiagramm waren bei teiloffenem Regler der Motorstrom immer zu niedrig und die Leerlaufverluste zu hoch angenommen. Damit stellt sich jetzt mit den bekannten Rechengrundlagen und -fehlern aber ganz schnell die Frage nach dem Sinn der Wicklungsumschaltung. Kleine Beispielrechnung: Leerlauf: 0.9A@7V und 12kUPM, kv=1780 11k: lt. Diagram Pmech ca. 23W, Pv ca. 11W 6k: lt. Diagram Pmech ca. 12W, Pv ca. 21W (wieder andere Werte als weiter oben, aber das Diagramm ist so verwackelt) Km mit 0.00053 angenommen Pmech alte Rechnung 11k: gegenprobe stimmt, 23W 6k: 6000*(4.71-0.9)*0.00053 = 12W, stimmt auch Pmech neue Rechnung (6k) Pel 33W, Akkustrom 4.71A, Tastgrad geschätzt 70%, Motorstrom 6.73A 6000*(6.73A-0.45A)*0.00053 = 20W, Pv wäre damit 13W und der Wirkungsgrad kaum schlechter als bei 11k Die Tastgradannahme noch überprüft: 70% > 4.9V Motorspannung, innere Spannung = 3.4V, Spannungsabfall an Ri = 6.73A*0.15Ohm=1V Stimmt nicht ganz, Tastgrad müsste etwas niedriger sein, damit sind Motorstrom, Pmech und Wirkungsgrad sogar noch höher. Allerdings müsste man noch so 3W Verluste für den teiloffenen Regler ansetzen, die lassen sich aber nicht vermeiden wenn man nicht immer Vollgas fährt. In dem weiter oben verlinkten Test fiel der Wirkungsgrad von 100% Gas zu 95% Gas um 10% und mehr. Das ganze passt aber zu den Wirkungsgradkennlinien die ich so kenne: Steiler Anstieg bis zum Optimum und dann langsammes Fallen (nur Prozente für den doppelten Strom als im Optimum).
{kind=link}
{kind=link}
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.