Hallo, und Hilfe !!! ich habe aktuell ein Projekt im Studium in dem ich die Ansteuerung für einen selbst gebauten 2- Achs Roboter aufbauen muss. Die Programmierung der beiden Schrittmotoren (Bi- polare) wird mit einem LPC Microcontroller realisiert, diese kriege ich hin. Jedoch habe ich (Maschinenbauer) richtige Schwierigkeiten mit der elektronischen Seite. Bisher existiert das Modell auf einem Steckbrett, der Prof. möchte jedoch eine fertige Platine haben mit einem einzigen Netzteil, was die komplette Stromversorgung für die beiden Schrittmotoren, für die Treiber, für den Microkontroller und für einen Magneten übernimmt. Und da ist mein Problem, ich weiß nicht, wie ich das am besten realisieren soll :( :( Hilfe !!! Es soll ein gewöhnliches Netzteil sein mit ca. 12 V und 5 A sein, das haben wir uns gemeinsam rausgesucht. Ich hatte das gesamte System mit einem regelbaren Netzteil bisher betrieben. Das soll nicht mehr sein. Auf die Platine sollen die beiden Treiber, der Mikrokontroller mit einer UART Schnittstelle. Wie gehe ich vor? wie werde ich die Spannung auf die Verbraucher mit einem Netzteil aufteilen, kennt ihr evtl. Schaltpläne oder ähnliche Projekte was für Netzteil habt ihr genommen?.... Bin ein Leihe... :(
Also normalerweise nimmt man ein Netzteil mit der größten benötigeten Spannung. Von der kann man dann auf die kleineren Voltzahlen runtergehen, zb mit nem 7805er auf 5V .... Und ein paar Daten wären nice, welcher Motor, welcher Motortreiber etc...
Hallo, ich bin für jede Hilfe dankbar, danke für die Antwort. Es sind zwei unterschiedliche Schrittmotoren aber 2 gleiche Treiber: 1 x Schrittmotor PSM57BYGHM201 6,8 V und 1,7 A 1 x Schrittmotor 14HY7002 9,6 V und 0,4 A 2 x Schrittmotortreiber Pololu A4988 3 - 5,5 V und 1 A Müssen dann für die jeweiligen Verbraucher die passenden Festspannungsregler ausgesucht werden? Wie sieht es dann mit Strom aus? stellt er sich dann passen ein?
Pololu A4988 " It operates from 8 V to 35 V and can deliver up to approximately 1 A per phase without a heat sink" > 1 x Schrittmotor PSM57BYGHM201 6,8 V und 1,7 A > 1 x Schrittmotor 14HY7002 9,6 V und 0,4 A Du solltest ein 24V Netzteil nehmen oder wandelst die 12V mit einem StepUp-Wandler auf eine höhere Spannung. Für den Mikrocontroller (1.6V oder 3.3V) solltest du dann einen StepDown-Spannungswandler nehmen. Bei "Texas Instruments" und "Linear Technology" findest du ein paar auf der Webseite, die haben da tolle Suchmasken. Dieter Matt schrieb: > Auf die Platine sollen die beiden Treiber, Sorge dafür dass die Störungen der Schrittmotoren nicht den Mikrocontroller beeinflussen. Du könntest getrennte Massen erstellen und diese beiden dann mit einer Brücke durch die eine Ferritperle gesteckt wurde verbinden. Die Spannungsversorgungen müssen gut abgeblockt werden, also nutze viele keramische Kondensatoren und jeder StepperMotor-Treiber bekommt einen dicken (470µF oder 1000µF) Elko. Dieter Matt schrieb: > der Mikrokontroller mit einer UART Schnittstelle. Du solltest einen UART nach USB-Konverterchip von FTDI (FT 232 R) verbauen. Eine Platine kannst du mit Eagle oder Designspark erzeugen.
Dieter Matt schrieb: > Es soll ein gewöhnliches Netzteil sein > mit ca. 12 V und 5 A sein, das haben wir uns gemeinsam rausgesucht. Meines Erachtens OK. 2K schrieb: > Also normalerweise nimmt man ein Netzteil mit der größten benötigeten > Spannung. Also 9.6V, Oder? B.A. schrieb: > Du solltest ein 24V Netzteil nehmen Hä? Ich denke 9.6V reichen. 12V wäre die nächste übliche Spannung. Das hatte Dieter mit seinem Prof doch bereits rausgesucht. Dieter Matt schrieb: > Schrittmotortreiber Pololu A4988 28-Pin QFN. Uiuiuiuiui. https://www.youtube.com/watch?v=HnVpYIdNqKQ Oder meinst Du das 6€-Breakout? http://www.watterott.com/de/Pololu-A4988-Schrittmotortreiber Reicht nicht auch der L298N für 60 Cent? http://www.aliexpress.com/item/-/893374013.html Ich verabschiede mich jetzt lieber!
Dieter Matt schrieb: > 1 x Schrittmotor PSM57BYGHM201 6,8 V und 1,7 A > 1 x Schrittmotor 14HY7002 9,6 V und 0,4 A > 2 x Schrittmotortreiber Pololu A4988 3 - 5,5 V und 1 A Äh, das passt ja nicht so wirklich oder ? Ein 1,7A Motor und ein 1A Treiber ?
Hier gibts den A4988 auf breakout für 5,60€ , die 2 A maximum current sind nicht auf Dauer gedacht, also anderer Treiber oder anderer Motor, AUßER du kühlst das Ding anständig...
2K schrieb: > Äh, das passt ja nicht so wirklich oder ? Ein 1,7A Motor und ein 1A > Treiber ? Warum, wenn er mit der halben Leistung zufrieden ist? Man muss Motoren ganz allgemein nicht immer mit dem angegebenen Höchststrom betreiben (oder fährst du dein Auto immer nur Vollgas?). Und nicht zu vergessen: bei Schrittmotoren bestimmt der Treiber den Strom. Wenn das Drehmoment reicht, läuft der Motor mit 1 A viel ruhiger und wird weniger heiss, was ist daran so schlimm? Georg
Torsten C. schrieb: > B.A. schrieb: >> Du solltest ein 24V Netzteil nehmen > > Hä? Ich denke 9.6V reichen. 12V wäre die nächste übliche Spannung. > > Das hatte Dieter mit seinem Prof doch bereits rausgesucht. Hast du überhaupt schon mal mit Schrittmotoren gearbeitet ? Du scheinst keine Ahnung zu haben. Diese angegeben Spannung stellt sich ein wenn der Motor steht! > 1 x Schrittmotor PSM57BYGHM201 6,8 V und 1,7 A Er hat einen Strangwiderstand von: 4 Ohm > 1 x Schrittmotor 14HY7002 9,6 V und 0,4 A Er hat einen Strangwiderstand von: 24 Ohm @ Dieter Matt (Firma: die) (dimka86) Miss einfach mal den Strangwiderstand deiner Motoren. Wenn der Motor sich aber schneller dreht ist es nicht mehr möglich mit dieser angegebenen Spannung den benötigten Strom durch die Spulen zu drücken. Wenn er wirklich 12V nutzt, dann wird er bei dem zweiten Motor richtige Probleme bekommen wenn er versucht den Motor etwas schneller drehen zu lassen. Das Resultat sind dann Schrittverluste. Dan der Treiber sogar 35V treiben kann ist es kein Problem 24V zu nutzen, den Motoren macht das absolut nichts aus da der Schrittmotortreiber den Strom begrenzt und sich dann immer die passende Spannung einstellt. Ich kann hier aber auch nicht sagen ob die 24V reichen um den Motor mit 50 Umdrehungen pro Sekunde bei maximaler Last bewegen zu können, aber das ist vielleicht auch gar nicht gefordert. Er sollte es aber mal ausprobieren bevor er sich auf eine Spannung von 12V festlegt.
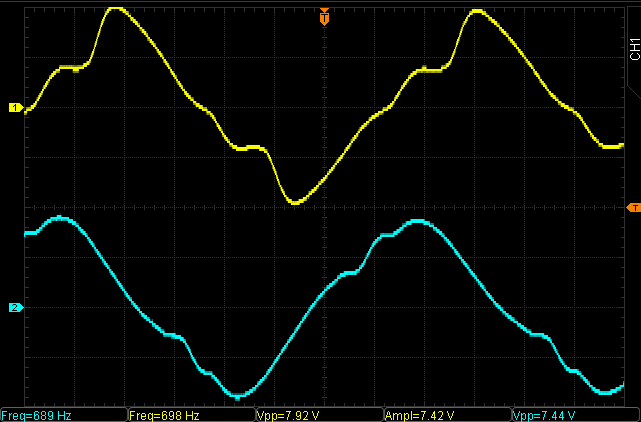
B.A. schrieb: > Er sollte es aber mal ausprobieren bevor er sich auf eine Spannung von > 12V festlegt. Bei meinem Schrittmotor habe ich es so gemacht: Akkuschrauber dran, mit erforderlecher Drehzahl gedreht und Spannung gemessen. https://www.mikrocontroller.net/attachment/258168/VID28-als-Generator.png Diese Spannung muss als "Offset" noch auf die angegebene Spannung bei Stillstand addiert werden. Wäre das 'Best practice'? Oder wie würdest Du vorgehen, falls die Drehzahl-Induktionsspannung-Kennlinie nicht im Datenblatt steht?
{kind=link}
B.A. schrieb: > Wenn er wirklich 12V nutzt, dann wird er bei dem zweiten Motor richtige > Probleme bekommen wenn er versucht den Motor etwas schneller drehen zu > lassen. Das Resultat sind dann Schrittverluste. Ist richtig. Und daher ist es bei gewissen Anforderungen an die Agilität gängige Praxis mit Spannungen zu Arbeiten die ein Vielfaches über der Nennspannug des Motors liegen und regelt nur den Strom. Darum können auch die billigsten Treiber mit solchen Spannungen umgehen. Wird aber gar keine Kombination aus hoher Drehzahl und hohem Drehmoment benötigt ist diese Maßnahme oft unnötig und führt nur zu einem schlechten (elektrischen) Wirkungsgrad. Je niedriger die Drehzahl um so näher sollte man an der Nennspannung bleiben. Es hängt also von den konkreten Vorgaben ab eine hohe Spannung Sinnvoll, gar zwingend nötig oder völlig unnützer blödsinn ist. > > Dan der Treiber sogar 35V treiben kann ist es kein Problem 24V zu > nutzen, den Motoren macht das absolut nichts aus da der > Schrittmotortreiber den Strom begrenzt und sich dann immer die passende > Spannung einstellt. Aus sicht der Motorsteuerung nicht. Auch ist der elektrische Wirkungsgrad wohl hier kein entscheidendes Kriterium. In sofern könntest du recht haben. Aber zum einen scheint das Netzteil schon mehr oder weniger fest zu stehen, zum anderen schreibt hier jemand der wie es scheint von Elektronik nahezu überhaupt keine Ahnung hat. Da jetzt noch DC/DC Converter o.ä. mit in das System einzubauen halte ich für sehr gewagt. Vermutlich ist die Elektronikplatine sowieso nur ein Nebenschauplatz des ganzen Projektes. Wenn die Schaltung wie gesagt auf dem Breadboard funktioniert und mit 12V Eingangsspannung der Treiber die erwarteten Ergebnisse bringt ist jede weitere Konzentration an der Spannung im sinne des erfolgreichen Projektabschlusses hier sicher absolut Kontraproduktiv! Wenn diese Annahmen stimmen würde ich das ganze so einfach wie nur Möglich halten. Eingangsbeschaltung für die 12V bestehend aus Sicherung, Verpolungsschutz (Diode in Sperrichtung zwischen Ub und Masse HINTER der Sicherung, keine Längsdiode um nicht noch mehr spannung zu verlieren...) Dann ausreichend Stützkapazitäten und dann direkt auf die Treiber. Die 3,3V Betriebsspannung für den Controller würde ich in diesem speziellen Fall mit einem einfachen Längsregler erzeugen. Da fließt scheinbar kein Strom, also fällt die am Längsregler verheizte Leistung weder vom Wärmemanagement noch von der Energiebilanz ins Gewicht. Die beiden Versorgungsleitungen für Controller und Motortreiber dabei möglichst früh trennen. Am besten schon direkt hinter der Sicherung um Rückwirkungen so gering wie möglich zu halten! Gruß Carsten
Carsten Sch. schrieb: > Wird aber gar keine Kombination aus hoher Drehzahl und hohem Drehmoment > benötigt ist diese Maßnahme oft unnötig und führt nur zu einem > schlechten (elektrischen) Wirkungsgrad. Nein. Die aktuellen Treiber arbeiten wie Schaltregler, der Motor dient dabei als Spule und die Spulen-Freilaufdiode ist im Treiber und wird oft mit MosFETs realisiert. Eine höhere Spannung macht ehrlich gesagt nichts aus. Er kann es auch so planen dass er bei Bedarf ein StepUp-Wandler Modul hinzu schalten könnte, welches die 12V dann auf eine höhere Spannung bringt. Dazu muss er nur 3 Pins nach draußen führen, 12V vom Netzteil, GND und die 12V die zu den Treibern geht. Wenn er zwischen 12V(Netzteil) und 12V(Treiber) eine Brücke macht fließt der Strom einfach rüber. Er kann aber auch die 12V(Netzteil) zu einem StepUp-Wandler-Modul gehen lassen und die meinetwegen 24V gehen wieder zurück zum "12V(Treiber)"-Pin. Solch ein StepDown- oder StepUp-Wandler hat heutzutage nicht mehr viele Bauteile, deshalb sollte das sehr einfach sein einen auf die Platine zu bringen.
Oh oh oh, hier sind mal wieder einige Experten unterwegs. Zum Glück auch Leute, die Ahnung haben. Eines verstehe ich aber nicht und das ist wichtig: Womit hast du KONKRET Probleme? Dein Beitrag liest sich so, als wärst du mit allem überfordert. Aber was ist nun konkret dein Problem? Je konkreter du sagst, was das Problem ist, umso besser kann man dir helfen. Motortreiber: Die Komponenten scheinen ja aktuell schon zu funktionieren, der A4988 ist auch extrem einfach einzusetzen: Strombegrenzung einstellen und fertig. Natürlich werden sich Leute darüber aufregen, dass der Chip ungekühlt nicht extrem lang 2A liefern wird (Abhilfe: kühlen!) und irgendwelche vorsintflutlichen Schrittmotoransteuerungen vorschlagen. Der A4988 ist aber einfach anzusteuern, gut erhältlich und kann ohne Aufwand im Mikroschrittbetrieb betrieben werden. Für diese Anwendung also nahezu ideal. Um Probleme mit den Treibern auszuschließen (die überhitzen sehr gerne bei schlechter Kühlung und schalten dann kurzzeitig ab. Das merkt man oftmals nicht und wundert sich dann, warum Schritte verloren gehen), solltest du kleine Kühlkörper aufkleben und das dann mit einem Lüfter aktiv kühlen. Die 12V Versorgungsspannung reichen. Mit mehr Spannung könnte man die Motor-Performance etwas verbessern, weil der A4988 die Strombegrenzung durch PWM realisiert und man dort mit mehr Spannung besser aufgehoben ist. Aber 12V reichen. Spannungsversorgung: Der Microcontroller braucht eine bestimmte Versorgungsspannung, ebenso der Steuerungsteil der Motortreiber. Die liegt sicher irgendwo im Bereich zwischen 3.3V und 5V. Allzu viel Strom brauchen die nicht, also nimmst du dir einen Linearregler mit 3.3V oder 5V Ausgangsspannung, der sagen wir mal 500mA bis 1A liefern kann, schraubst ihn auf einen Kühlkörper im Luftstrom und versorgst damit deinen Microcontroller und deinen Motortreiber. (Der Motortreiber hat zwei Versorgungsspannungen: Die für die Motoren, das sind bei dir dann 12V, und die für die Elektronik, das sind dann 3.3V oder 5V.) Magnet: Bleibt noch der Elektromagnet. Du solltest auf jeden Fall darauf achten, Vorkehrungen zu treffen, dass dir der Elektromagnet nicht deine Elektronik zerschießt, sobald er an- oder abgeschaltet wird. Sinnvollerweise wird der so dimensioniert, dass er an 12V angeschlossen werden kann und dann funktioniert. Mit welcher Spannung betreibst du ihn denn aktuell? Aufbau: Wenn du alles bereits auf Breakout-Boards hast, dann ist es kein Problem, die Sache auf Lochraster aufzubauen, allzu komplex ist die Schaltung ja nicht. Alles, was höhere Ströme benötigt (Netzteil zu Motortreiber, Motortreiber zu Motoren, Netzteil zu Schalter für Magnet, Schalter für Magnet zu Magnet), solltest du auf der Platine auch mit dickeren Leitungen ausführen. Auf Lochraster kann man beispielweise einfach einen Draht mit verlöten, das reicht dann.
someone schrieb: > Magnet: Bleibt noch der Elektromagnet. Du solltest auf jeden Fall darauf > achten, Vorkehrungen zu treffen, dass dir der Elektromagnet nicht deine > Elektronik zerschießt, sobald er an- oder abgeschaltet wird. Warum und vor allen Dingen wie soll ein Elektromagnet bei Anschalten irgendwelche Elektronik zerschießen können? Damit es beim Abschalten keine hohen Induktionsspannungen gibt, braucht man natürlich eine Freilaufdiode, damit der Strom weiter fließen kann. Falls hohe Abschaltgeschwindigkeiten gewünscht sind, ist die allerdings etwas störend - aber wer weiß schon, wie schnell der Strom abklingen muss.
someone schrieb: > Aber 12V reichen. Würdest du deine Hand dafür ins Feuer legen? Für den einen Motor mag das vielleicht stimmen. Du gehst nur davon aus da sein aktueller Prototyp zu funktionieren scheint, sie den auch mit 12V betreiben und die Anforderungen an die Motoren gleich bleiben. Wenn er sich dann denkt dass er kurzzeitig mal etwas mehr Strom und eine höhere Drehzahl benötigt, dann kann der Treiber den Strom gar nicht mehr liefern da der Induktive Widerstand der Spulen zu hoch ist. Wir haben viel zu wenig Informationen bekommen als dass wir das abschätzen können, deshalb würde ich hier lieber etwas mehr Spielraum einplanen ... weil der Spielraum hier sogar billig erkauft wird. Er kann immer noch ein 12V Netzteil nutzen anstatt eines 24V Netzteils, dazu muss er ganz einfach den Stecker des anderen Netzteils in die Hohlbuchse stecken. Für den Controller kann er einen Linearregler nutzen, aber er muss dann auch die Wärme wegbekommen, das bedeutet dass die Platinenfläche größer wird. Ich verwende zwar auch Linearregler, aber wenn 24mA gezogen werden sind das schon über 200mW.
someone schrieb: > Die 12V Versorgungsspannung > reichen. Mit mehr Spannung könnte man die Motor-Performance etwas > verbessern, weil der A4988 die Strombegrenzung durch PWM realisiert und > man dort mit mehr Spannung besser aufgehoben ist. Aber 12V reichen. Mit anderen Worten, wenn der 9,6V Motor sich irgendwie mit höherer Schrittgeschwindigkeit bewegen und dabei auch noch Drehmoment abgeben soll, ist man bei 12V Betriebsspannung verraten und verkauft.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.