Ich steh gerade auf dem Schlauch - habe das Gefühl, es geht auch "analog" also diskret aufgebaut. Also ich möchte einfach ein Servo-Signal (periodisch 1-2ms innerhalb 20ms) zu einem PWM-Signal umwandeln (0-20ms innerhalb 20ms), um damit testweise einen kleinen brushed-Motor hinter einem FET anzutreiben. Nun kann man ja einen uC nehmen, duty-cycle ausmessen, PWM ansteuern usw. - aber (wie) geht es auch "diskret aufgebaut" ? Mit Monoflop oder so?
Rainer Unsinn schrieb: > aber (wie) geht es auch "diskret aufgebaut" ? Geht. Servosignal mit OPV integrieren, als Ergebnis erhälst Du eine Gleichspannung beliebig verstärkt. Diese gibst Du dann auf einen Komparator, der auf den anderen Eingang einen Sägezahn bekommt. Falls Du nich unbedingt duty cycles 0% - 100% willst, geht es auch mit einem 555 Timer.
Ok, ich brauche nicht zwingend 0-100% - Wie geht es mit einem 555 ?
Rainer Unsinn schrieb: > Also ich möchte einfach ein Servo-Signal (periodisch 1-2ms innerhalb > 20ms) zu einem PWM-Signal umwandeln (0-20ms innerhalb 20ms), um damit > testweise einen kleinen brushed-Motor hinter einem FET anzutreiben. Da würde ich einfach einen sog. Motorregler nehmen. Ich glaube nicht, das Du einen solchen Motorregler billiger bauen kannst, als es die Chinesen können.
Welche Spannung hat dein Servosignal? Welche Versorgungsspannung steht zur Verfügung? Wie genau soll die Übersetzung 0..2ms -> 0..20ms der Pulsbreite sein (zulässige Abweichung ca. in %) Edit: ist eine stufenweise Regelung zulässig (z.B. in 8 oder 16 Stufen)?
Harald Wilhelms schrieb: > Da würde ich einfach einen sog. Motorregler nehmen. Ich glaube nicht, > das Du einen solchen Motorregler billiger bauen kannst, als es die > Chinesen können. Das stimmt prinzipiell, ich möchte es nur später ganz klein haben und überhaupt selbst basteln :-) Joe F. schrieb: > Welche Spannung hat dein Servosignal? > Welche Versorgungsspannung steht zur Verfügung? > Wie genau soll die Übersetzung 0..2ms -> 0..20ms der Pulsbreite sein > (zulässige Abweichung ca. in %) > > Edit: > ist eine stufenweise Regelung zulässig (z.B. in 8 oder 16 Stufen)? Alles 5V, Abweichung ist unkritisch, aber Stufen wären doof.
Rainer Unsinn schrieb: > Wie geht es mit einem 555 ? https://electrosome.com/pwm-using-555-timer-ic/
Ich bin ja immer ein ausgesprochener Freund von analogen Schaltungen, in diesem Fall wäre aber eine digitale Lösung eindeutig überlegen, wenn du eine einigermaßen schnell ansprechende Lösung haben möchtest. Eine analoge Lösung sieht eigentlich immer so aus, dass du die Servopulse zunächst über Tiefpassfilterung in eine analoge Spannung umwandelst, und über diese Spannung wiederum eine Ausgangs-PWM ansteuerst. Da die Pulsbreite recht schmal ist, und die Frequenz sehr niedrig (50 Hz), muss der Tiefpass eine sehr tiefe Grenzfrequenz haben. Das sorgt dafür, dass das System sehr träge wird. Du brauchst geschätzte 0.5s, um eine Eingangsänderung vollständig zum Ausgang weiterzugeben. Die digitale Lösung hingegen kann komplett ohne Verzögerung, und mit hoher Präzision arbeiten, da keine Tiefpassfilterung des Eingangssignales nötig ist. Insbesondere für den Fall, dass der Motor in einem ferngesteuerten Flugmodell eingesetzt werden soll, ist die schnellere Reaktionszeit der Steuerung ein großer Vorteil.
Besserwisser schrieb: > Analog geht da gar nichts. Ein PWM-Signal ist digital. Hohoho. Sehr qualifiziert diese Aussage...
Rainer Unsinn schrieb: > Also ich möchte einfach ein Servo-Signal (periodisch 1-2ms innerhalb > 20ms) zu einem PWM-Signal umwandeln (0-20ms innerhalb 20ms), Das ist genau das, was das analoge IC (z.B. M51660) in einem Servo macht. Ich erinnere mich an den Einsatz solcher ICs in Fahrtreglern. M.N. schrieb: > Früher hat man das mit nem NE555 gemacht. > Such mal nach "Servo-Tester" Das ist genau das umgekehrte, die Erzeugung eines Servosignals, nicht die Auswertung. MfG Klaus
Rainer Unsinn schrieb: > ich möchte es nur später ganz klein haben Auch wenn's nicht zur Fragestellung passt, in Sachen Baugröße wird eine analoge Lösung kaum einen µC im 8 Pin SOIC oder DFN Gehäuse unterbieten. Besserwisser schrieb: > Analog geht da gar nichts. Ein PWM-Signal ist digital. Sicher? Wo findet z.B. bei der NE555 Lösung die Zeitdiskretisierung statt?
Schau mal hier, habe ich erst gestern gemäß Bild 2.1 aufgebaut. Ist eine einfache Schaltung mit NE555 und ein paar Bauteilen http://www.elektronik-kompendium.de/public/schaerer/pwm555.htm
Danke an alle, jetzt habe ich genug Input zum Prinzip, und somit zum Basteln!
Rainer Unsinn schrieb: > Danke an alle, jetzt habe ich genug Input zum Prinzip, und somit > zum > Basteln! Na, warte mal, ich hab nochmal nachgedacht, und hab eine Idee für eine richtig gute analoge Lösung. Mehr dazu heute abend, komme grad nicht dazu da was zu machen.
Angehängte Dateien:
-

servo-pulse-to-pwm.png
67 KB
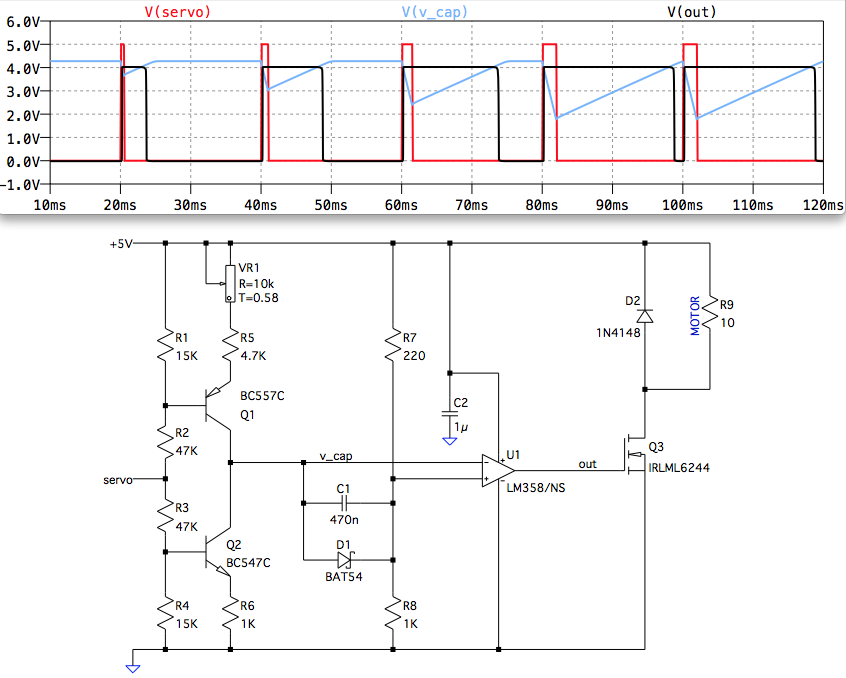
So, habe inzwischen etwas zusammengeklickert. Das Prinzip ist folgendes: Ein Kondensator wird über Konstantstromquellen ent- und geladen. Die Ströme sind so eingestellt, dass der Kondensator sich etwa 9x schneller entlädt als auflädt. Die Entladung passiert in der High-Phase des Servo Signals, das Aufladen in der Low-Phase. Ein Komparator erzeugt dann das "verlängerte" PWM Signal. Da der Kondensator mit konstantem Strom ent- bzw. geladen wird, entsteht ein schön linearer Verlauf der Ladekurve. Mit dem Potentiometer VR1 stellt man den (Auf-)Ladestrom ein. Es wird so eingestellt, dass bei einem 1ms Puls am Eingang etwa ein 10ms Puls am Ausgang herauskommt, bzw. dass bei einem 2ms Puls gerade noch kurze Low-Spizen am Ausgang zu sehen sind. Das schöne an dieser Schaltung ist, dass das Eingangssignal nicht erst über einen Tiefpass in eine analoge Spannung umgewandelt werden muss. Die oben erwähnte Verzögerung entfällt also. Viel Vergnügen.
Was für ein Aufwand. Ich würde einfach nach Conrad gehen, einen 5 Euro Servo kaufen und ausschlachten. Da its nämlich ein Chip drin, der genau das macht, was du brauchst.
stefan us schrieb: > Was für ein Aufwand. > > Ich würde einfach nach Conrad gehen, einen 5 Euro Servo kaufen und > ausschlachten. So wie ich es verstanden habe geht es TO mehr ums Basteln und um learning by doing. Der Aufwand hält sich ja in Grenzen. Die 1N4148 ist übrigens für einen Motor nicht sehr geeignet. Man sollte hier besser eine Schottky mit mehr Strombelastbarkeit nehmen. Und ich stelle hier gleich mal eine Frage in den Raum: Das Schützen des FETs und damit verbundene Abbremsen des Motors über die Schutzdiode ist ja relativ energieverschwenderisch. Weiss jemand, ob das bei Flugmodellen (Drohnen) genau so gelöst ist? Wenn ja: es wäre doch mal eine gute Idee, diese Energie wieder zurück zu gewinnen...
Die Freilaufdiode schützt nicht nur den FET. Sie sorgt auch dafür, dass der Strom in den OFF-Phasen weiter fließt. Der Motor arbeitet dadurch effizienter. Ein Relais mit Freilaufdiode schaltet wesentlich langsamer ab, als mit Freilaufdiode.
stefan us schrieb: > Ein Relais mit Freilaufdiode schaltet wesentlich langsamer ab, als mit > Freilaufdiode. Wie denn nu?
Joe F. schrieb: > Das Schützen des FETs und damit verbundene Abbremsen des Motors über die > Schutzdiode ist ja relativ energieverschwenderisch. Die Freilaufdiode ist primär nicht da um zu schützen, sondern um in der Freilaufphase das weiterlaufen des Motors zu gewährleisten. Deshalb auch der Name. Natürlich hat die Diode vorallen in der Freilaufphase durch die Durchlssspannung auch Verluste; der Energieeinsparfaktor überwiegt aber deutlich.
Harald Wilhelms schrieb: > sondern um > in der Freilaufphase das weiterlaufen des Motors zu gewährleisten. Der Motor läuft auch ohne Diode weiter, sogar besser, da die Diode den Motor kurzschließt (bremst). In erster Linie ist die Diode tatsächlich als Schutz vor Überspannung da, denn die Induktivität eines Relais oder eine Motorwicklung, der bei aufgebautem Magnetfeld der Strom schlagartig abgeschaltet wird, baut eine Spannungsspitze auf. Im Falle eines Relais wirkt sich die Diode dahingehend aus, dass das Magnetfeld schneller zusammenbricht, und der Kontakt daher auch schneller schaltet. Im Falle des Motors muss die Diode aber noch mehr aushalten, als den Spannungspeak durch das zusammenbrechende Magnetfeld, da der Motor durch die Schwungmasse in Bewegung bleibt und als Generator bis zum Stillstand Strom erzeugt. Ein Teil dieser Energie wird dann durch die Diode in Wärme umgewandelt, und die Diode muss dies aushalten können.
Joe F. schrieb: > Der Motor läuft auch ohne Diode weiter, sogar besser, da die Diode den > Motor kurzschließt (bremst). Ich würde sagen, Du solltest Dein Posting noch mal in Ruhe überdenken...
Mit Diode läuft der Motor ruhiger wenn die Taktfrequenz groß genug ist. Zum Thema, nimm doch einfach ein IC ZN419. Der macht deine Impulsverlängerung.
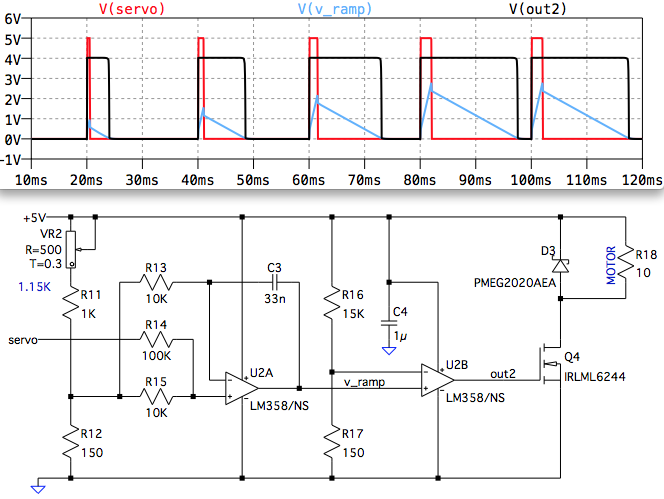
stefan us schrieb: > Was für ein Aufwand. Finde ich gar nicht. Ich würde allerdings die ohnehin vorhandene zweite Hälfte des LM358 als Konstantstromquelle benutzen, damit sie was zu tun hat. Damit reduziert sich der Aufwand noch mal. Denken ausserhalb der Kiste ist doch mal was anderes, ich finds gut.
Angehängte Dateien:
-

servo-pulse-to-pwm-b.png
58 KB
{kind=link}
Matthias Sch. schrieb: > Ich würde allerdings die ohnehin vorhandene zweite > Hälfte des LM358 als Konstantstromquelle benutzen, damit sie was zu tun > hat. Damit reduziert sich der Aufwand noch mal. Das ist eine sehr gute Idee.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.