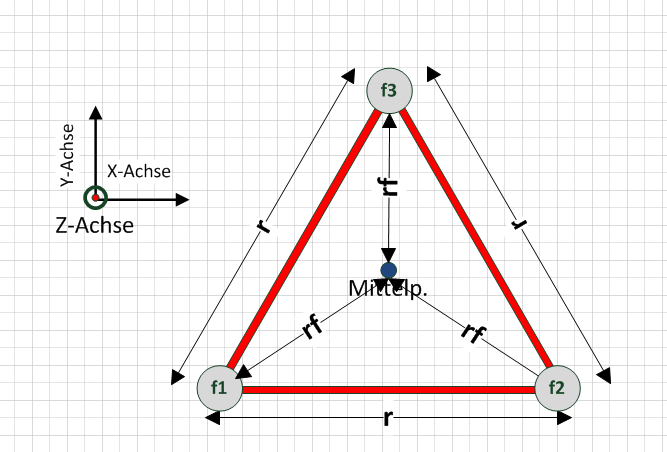
Hallo Leute, ich habe folgende Lösung zu ermitteln, auf die ich bis dato nicht gekommen bin und mir nun erhoffe, dass Ihr mir hier weiter helfen könnt: Gegeben ist ein Dreieck mit den Seitenlängen r und den Abständen rf zu dem Mittelpunkt. Dieses Dreieck kann sich nur entlang der z-Koordinate bewegen, d.h. es hat drei FH, da z, Mx und My. Die Kräfte f1,f2 und f3 sind bekannt. Nun ist das ganze system jedoch verkoppelt, da f1 auch Einfluss auf die Höhe von f2 und f3 hat und so weiter. Wie ermittele ich nun die Kopplungen ? Euler-Newton Gleichungen ? Irgendwie klappt das bei mir nicht. Ziel ist es nämlich, dass ganze zu simulieren. Um eure Hilfe wäre ich sehr dankbar.
Angehängte Dateien:
-

Unbenannt.png
34 KB
In welche Richtung wirken denn die drei Kräfte?
>es hat drei FH, da z, Mx und My.
??
Hallo Michel, was hier fehlt, ist ein richtiger mechanischer Freischnitt oder eine bessere Beschreibung des Systems. Wird das Dreieck als starr angenommen? An welchen Stellen ist es gelagert (befestigt)? Was soll denn genau simuliert werden? Stefan
Stefan H. schrieb: > Hallo Michel, > > was hier fehlt, ist ein richtiger mechanischer Freischnitt oder eine > bessere Beschreibung des Systems. Wird das Dreieck als starr angenommen? > An welchen Stellen ist es gelagert (befestigt)? Was soll denn genau > simuliert werden? > > Stefan Der Körper wird als starr angenommen. Gelagert ist es an den Stellen f1,f2 und f3, sodass die Bewegung in der x-y-Ebene verhindert wird. Simuliert soll dann die HöhenRegelung des Dreiecks. D.h. gegeben sind Kräfte f1,f2 und f3, die alle in Positiver z-Richtung wirken. Weiterhin gebe ich die Koordinaten z,Theta_x und Theta_y vor und möchte dann entsprechend den Läufer auf diese Koordinaten regeln.
Wenn f1, f2 und f3 Lager sind, die nur eine Bewegung in z-Achse erlauben, tut sich genau gar nichts, wenn eine Kraft in Richtung z-Achse ausgeübt wird, da sich das Dreieck ja nicht verformen kann. Was du wahrscheinlich vorhast geht eher in Richtung Tripod? Mit Läufer meinst du den Mittelpunkt? Wie sind Theat_x, Theata_y definiert? Die Lage des Dreiecks gegenüber der Ebene XY?
Oder liegt das Dreieck an jeder Ecke auf einer Feder-Dämpfer "Verschaltung"? ZB, dass an jeder Ecke eine Feder und ein Dämpfer parallel geschaltet sind?
Hallo, ich hoffe das hilft Dir weiter. Wie gesagt, ich bin mir nicht 100%ig sicher, ob ich das Problem richtig verstanden habe. Stefan
Stefan H. schrieb: > Hallo, > > ich hoffe das hilft Dir weiter. Wie gesagt, ich bin mir nicht 100%ig > sicher, ob ich das Problem richtig verstanden habe. > > Stefan Hallo Stefan, danke du hast es richtig verstanden. Also im Grunde steckt doch dann in der zweiten Matrix die Kopplung drin, oder ? Das ganze geht richtung tripod, d.h. Kräfte f1,f2 und f3 können generiert werden, sodass das System drei Freiheitsgrade hat. Wie simuliert man das System nun bzw. wie regelt man das ganze. Als Vorgabe erfolgen die glob. Koordinaten z, theta_x und theta_y. Ein Blockschaltbild oder ähnliches würde mir reichen. Vielen Dank vorab für eure Antworten. Hat mir super geholfen.
Sieht verdächtig nach einem Hexagon für einen Deltadrucker aus. http://fablab-karlsruhe.de/wiki/doku.php?id=projekte:hexagon
Angehängte Dateien:
-

rm.png
9,4 KB
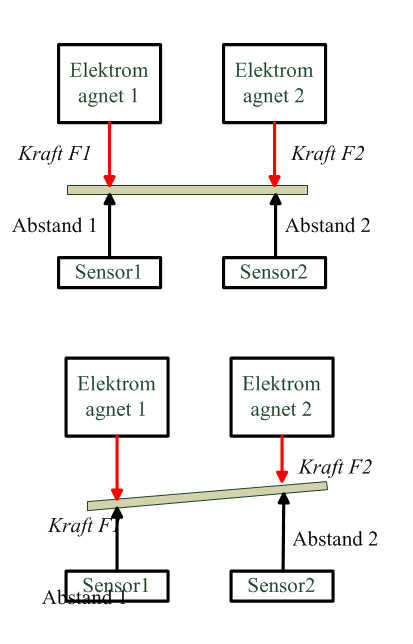
Hallo Leute, anbei folgende Gedankenstellung: Versuche folgendes zu simulieren: Zwei Kräfte halten eine Stange in einer vorgegebenen Höhe, wobei die Höhe mit jeweils zwei Sensoren gemessen wird. Nun ist es aber so, dass wenn z.B. die Kraft F2 etwas höher ist als F1, dann wird die rechte Seite stärker angezogen. Diese Kraft F2 hat doch aber auch einen Einfluss auf die Höhe von F1, wie kann man diese Kopplung beschreiben ? Weil einfach zu sagen: Ich simuliere das ganze mit F/m=a und a zweimal integriert ergibt dann mein x, funktioniert leider nicht, da wie gesagt die Kopplung noch nicht berücksichtigt worden ist. Vll. kann mir hier einer weiterhelfen.
Im einfachsten Fall bewirken mehrere Kräfte eine Beschleunigung linearer und rotationaler Art. Dazu muss man nur die Bewegungsgleichungen aufschreiben und die Bewegung daraus herleiten. Schwierig wird es, wenn sog. Zwangsbedingungen wie z.B. bei einem Pendel hinzukommen. Ein Einfachpendel ist noch einfach, ein Doppelpendel (zwei Glieder aneinandergehängt) ist schon wesentlich schwieriger. In der Physik-Oberstufe hast du vlt. mal das Lagrange-Prinzip kennengelernt. Such mal nach Lagrange-Prinzip bzw. nach Lagrange-Multiplikator.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.