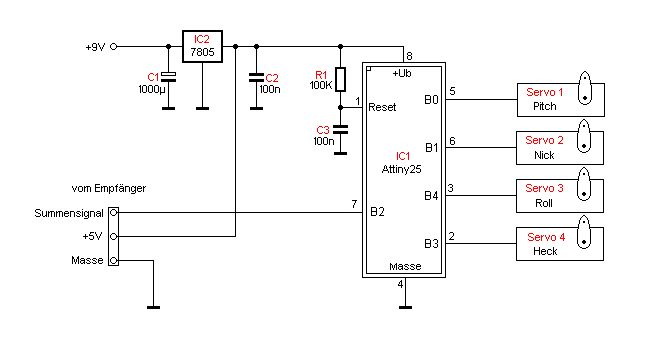
Hallo werte Gemeinde, ich beschäftige mich mit einer Schaltung, die das Summensignal eines Fernsteuerempfängers einliest, die Servostellungen der einzelnen Kanäle dekodiert, 4 davon nach gewissen Rechenalgorithmen verarbeitet und an insgesamt 4 Servos wieder ausgibt. Die Schaltung soll dazu dienen, mittels 4 Servos die Steuerknüppel in einem Modellhubschraubercockpit sinnrichtig zu bewegen. Da eine 3-Punkt-Anlenkung der Taumelscheibe angewand wird, überträgt der Sender die Steuerfunktionen nicht einzeln sondern vermischt, daher die Umrechnung im Controller. Um einem Vorschlag direkt entgegenzutreten: es sind weder genügend freie Kanäle oder Empfängerausgänge vorhanden, um die Steuerfunktionen unvermischt zu übertragen. Die Software läuft prinzipiell schon, jedoch habe ich auf den Servoausgängen regelmäßige Zuckungen, Jitter, Glitches. Da ich seit über einer Woche vergeblich nach dem Fehler/den Fehlern suche wende ich mich jetzt ans Forum. Ich weiß nicht mehr, wo ich noch ansetzen kann und wäre schon froh um ein paar Stichworte diesbezüglich. Erfahrung mit Fernsteuerung und Oszilloskop sind vorhanden. Vielen Dank
Angehängte Dateien:
-

plandekoder.gif
5,6 KB
Angehängte Dateien:
-

plandekoder.gif
6,3 KB
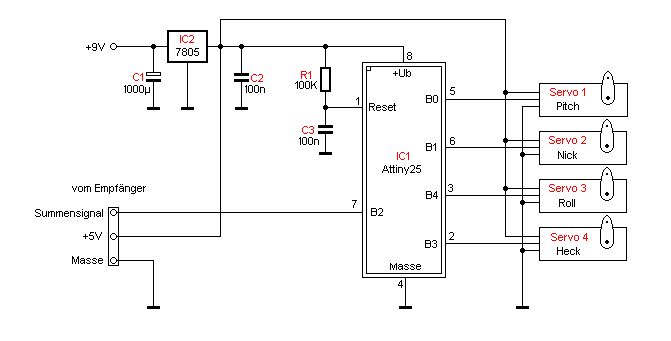
Im Schaltplan hatte ich die Spannungsversorgung für die Servos unterschlagen, hier die Korrektur.
Selbst bei kleineren Servos hab ich schon 1,8A beim Anlaufen gemessen. Jetzt aber 4 Stück an einem 7805? Mit 9V von einem 9V Block? MfG Klaus
Du verwendest den internen RC-Oszillator? Falls dem so ist, das Problem hatte ich auch schon, habe dann einen Quarz verwendet, damit war Ruhe. Habe versucht, damals in diesem Forum dieser Frage nachzugehen, was dabei allerdings raus kam, war nur totaler Müll von unseren so genannten "Experten". Seitdem schaue ich nur noch sporadisch in diesem Forum vorbei, getreu dem Motto. "Stick the Finger to the mikrocontroller.net-Experts!" Traurig, aber wahr.
Erläuterung: im meinem Testaufbau ist lediglich ein Servo mit 500mA Blockierstrom angeschlossen. Der Ripple auf den 5 Volt beträgt bei blockiertem Servo 50 mV. Und auch bei 4 angeschlossenen Servos ändert sich daran nichts wesentlich, da deren Ansteuerung sequenziell erfolgt. Im Modell wird die Stromversorgung später für Servos und Controller natürlich getrennt sein. Der Testaufbau laut Schaltplan dient lediglich der Softwareentwicklung. Der interne Oszillator läuft nach Oszillogramm stabil. Übrigens Bemerkungen, wie "das kannst du doch garnicht messen" werde ich ignorieren.
Meine "üblichen Verdächtigen" sind in solchen Fällen zunächst mal nicht-atomare 16-Bit-Zugriffe, also z.B. sowas in der Art: (alter Eingangswert: 0x2FE) - die Rechenroutine liest das LSB vom 16-bit Eingangswert, - Interrupt-Routine empfängt und legt den neuen Eingangswert ab (z.B. 0x305), - Rechenroutine holt das MSB vom Eingangswert, um die Berechnung des Ausgabewertes fortzusetzen. Ergebnis: die Rechenroutine verarbeitet als Eingangswert 0x3FE
Danke Thomas für deinen Hinweis. An atomare Zugriffe habe ich auch schon gedacht, aber ich erkenne im Code diesbezüglich keine gefährliche Stelle. Bei fehlendem Eingangssignal kommen die Ausgangssignale übrigens fast stabil, jedenfalls so stabil, dass ich die Servos mittels kleiner Hysterese ruhig bekomme.
Habe gerade auch mal den Code etwas überflogen. Eine "gefährliche" Stelle könnte der Interrupt-Mechanismus zur Erzeugung/Verarbeitung des timer0_h sein: Wenn die Flanken-ISR kurz vor Überlauf des Timer0 auftritt, könnte es evtl. sein, daß die ISR den falschen Wert für timer0_h speichert?
Stabil ohne Eingangssignal spricht aber schon für ein Problem eben dort. Wenn es statt DIP8 auch ein SO14 sein darf, dann besser ein TINY24/44/84. Der hat einen 16bit-Timer1 mit Input-Capture. Damit kann man exakte Zeitmessungen machen, auch wenn mal ein anderer Int querschießt.
Dass dort ein Problem entstehen kann hatte ich nicht auf dem Schirm, ist aber nachvollziehbar. Ich habe keine Idee wie ich in meiner Anwendung den Timer0 "wasserdicht" auf 16Bit "aufgebohrt" bekomme. Vielleicht hat da jemand eine Anregung. Ich werde zwischenzeitlich mal darüber nachdenken, ob mir dort eine 8Bit-Auflösung genügt oder ich einen anderen Controller nutze. Danke bis hierhin.
Stefan K schrieb: > Ich habe keine Idee wie ich in meiner Anwendung > den Timer0 "wasserdicht" auf 16Bit "aufgebohrt" bekomme. Beitrag "AVR Timer mit 32 Bit"
Oder auf Tiny24 umschwenken. Nicht nur 16Bit Timer, sonder auch Input-Capture.
Stefan K schrieb: > Dass dort ein Problem entstehen kann hatte ich nicht auf dem Schirm, ist > aber nachvollziehbar. Ich habe keine Idee wie ich in meiner Anwendung > den Timer0 "wasserdicht" auf 16Bit "aufgebohrt" bekomme. Vielleicht hat > da jemand eine Anregung. Da es technisch überhaupt nur eine einzige vollständig zuverlässige Möglichkeit zur Synchronisation mit ISRs gibt, ist eine Empfehlung hier nicht schwer: Du benutzt einfach diese einzige Möglichkeit... Sprich, bei allem, was nicht exklusiv läuft, sind die Zugriffe auf die gemeinsam genutzten Resourcen in einem cli/sei Block zu verpacken. Im konreten Fall ist es allerdings etwas komplizierter, weil ja auch noch die Hardware direkt beteiligt ist und die kann man mit cli nicht anhalten. Das Designpattern zum Lesen muß also so aussehen:
1 | getvirtcnt: |
2 | cli |
3 | ;ab jetzt kann der Timer-Interupt nicht mehr reinpfuschen |
4 | ;und du kämpfst nur noch mit der Hardware |
5 | in R16,Timer0_l ;erster Versuch |
6 | mov R17,Timer0_h |
7 | sbis TIFR0,TOV0 ;Check auf zwischenzeitlichen Timer-Überlauf |
8 | rjmp done ;war nich->OK |
9 | in R16,Timer0_l ;ansonsten nochmal HW-Teil lesen |
10 | inc R17 ;und virtuellen Teil eigenmächtig anpassen |
11 | done: |
12 | sei |
13 | ret ;nach dem ret holt die ISR das dann sofort für den |
14 | ;tatsächlichen Timer0_h nach |
Danach hast du in R17:R16 zuverlassig den korrekten Stand des Timers. Voraussetzung dafür ist aber natürlich, daß an Timer0_l überhaupt niemand rumpfuscht und an Timer0_h ausschließlich die Overflow-ISR ein einfaches Increment vornimmt. Dein Design hingegen ist extrem arg "von hinten durch die Brust in's Knie". Ich hab's nicht näher analysiert, aber ich würde mal davon ausgehen, daß dieses Design überhaupt nicht zuverlässig zum Laufen zu bekommen ist. So wie fast immer, wenn schreibend an TCNT rumgepfuscht wird...
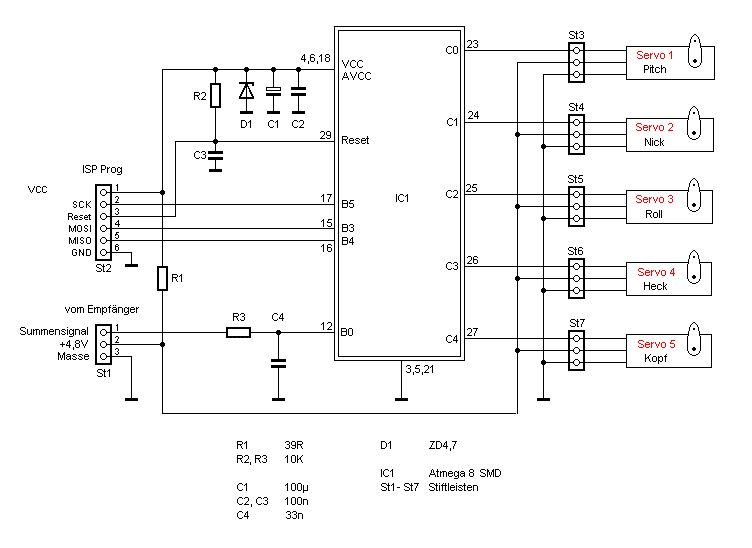
Hallo, das Thema hat mich neugierig gemacht. Ob es mit 8Bit-Timern und ohne Quarz möglich ist, so etwas zu realisieren. Da ich eine Tiny85 habe versuchte ich es einmal. Hier ist das Ergebnis. Die Pinnbelegung ist wie bei Stefan K. Meine getesteten Servos sind ziemlich ruhig. Das Summensignal liefert ein Jeti/Duplex SAT Programm ist nicht perfekt dokumentiert. Ist halt nur ein Test. Tiny muss mit 16Mhz laufen. MFG Thomas
Angehängte Dateien:
-

RC-Dekoder_M8.GIF
11 KB
{kind=link}
{kind=link}
{kind=link}
Ich melde mich nochmal: @c-hater mit einer Veränderung des Codes nach deiner Idee war die Sache schon erheblich besser, aber noch nicht gut genug, da ist wohl wirklich einiges von hinten herum durchs Knie programmiert. @Thomas ich habe mir den Code mal grob angesehen und kann daraus Anregungen für die Zukunft nehmen, danke @alle ich bin auf den Mega8 umgeschwenkt (ja, ja, aber ich habe davon noch viele hier und kenne mich ganz gut mit denen aus), benutze nur den 16 Bit-Timer und auch ausschließlich lesend. Da ich nun noch viele Pins frei habe, wurde noch ein fünftes Servo für die Ansteuerung des Kopfes der Pilotenpuppe etabliert. Jetzt läuft der Code gut und so werde ich das dann später auch ins Modell einbauen. Jetzt kann ich mir langsam überlegen, wie ich die Gelenke und Anlenkgestänge herstelle und mit den 5 Servos unter den Kabinenboden bekomme. Danke euch.
Blöde Frage: Wie machen es eigentlich die anderen Modellbauer, die nicht entwickeln und programmieren können? Gibt es da ein extra Gerätchen in der Art, wie du es jetzt nachbaust? Oder können andere Servos bereits das Summensignal verarbeiten?
Peter P. schrieb: > Gibt es da ein extra Gerätchen in der Art, wie du es jetzt > nachbaust? Die kommen mit einem simplen Zähler und Demultplexer aus, weil die die Signale nicht verändern wollen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.