hallo, ich habe hier eine emitterschaltung mit der das signal des arduino verstärkt wird, es wird aber auch invertiert, was bei der weiterverwendung des signals stört... gibt es eine einfache möglichkeit die invertierung nach der verstärkung wieder rückgängig zu machen? Wäre für jede idee - die ein anfänger auch umsetzen kann - sehr dankbar...
Angehängte Dateien:
-

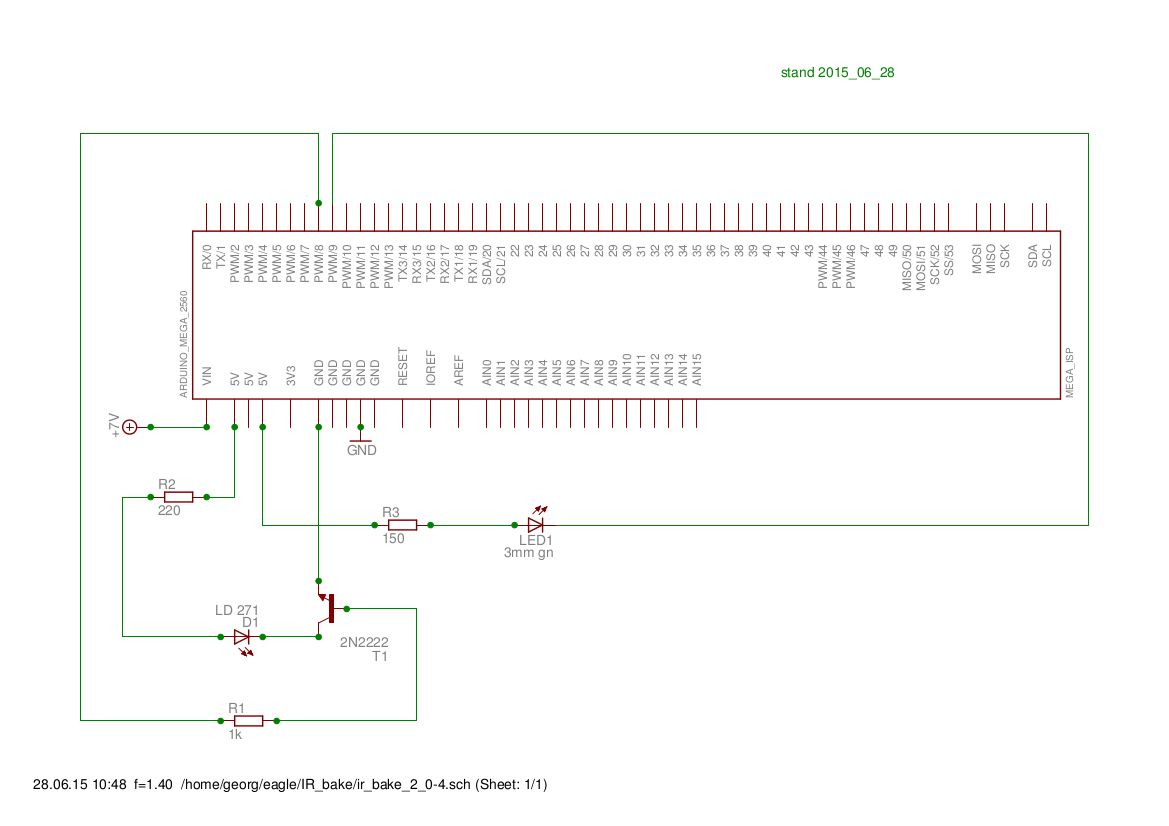
ir_bake_2_0-4.png
40 KB
Einfach in der Software invertieren? Wäre das eine Lösung?
georg schrieb: > gibt es eine einfache möglichkeit die invertierung nach der verstärkung > wieder rückgängig zu machen? Es gibt sogar die Möglichkeit die Invertierung zu verhindern. Du schaltest die LED mit Vorwiderstand einfach zwischen Emitter und Masse und den Kollektor an Vin oder +5V. Den Basiswiderstand lässt du weg. Die Schaltung hat weniger Aufwand und frisst, im Gegensatz zur Emitterschaltung, automatisch nur soviel Baisisstrom wie unbedingt nötig.
georg schrieb: > es wird aber auch invertiert, was bei der > weiterverwendung des signals stört... Wo wird das Signal invertiert? Ich sehe: Ausgang wird "1" --> LED leuchtet, also keine Invertierung. wendelsberg
Angehängte Dateien:
-

ir_bake_2_0-5.png
38 KB -

2015_07_16_wirre_zeichen_LCD.png
600 KB
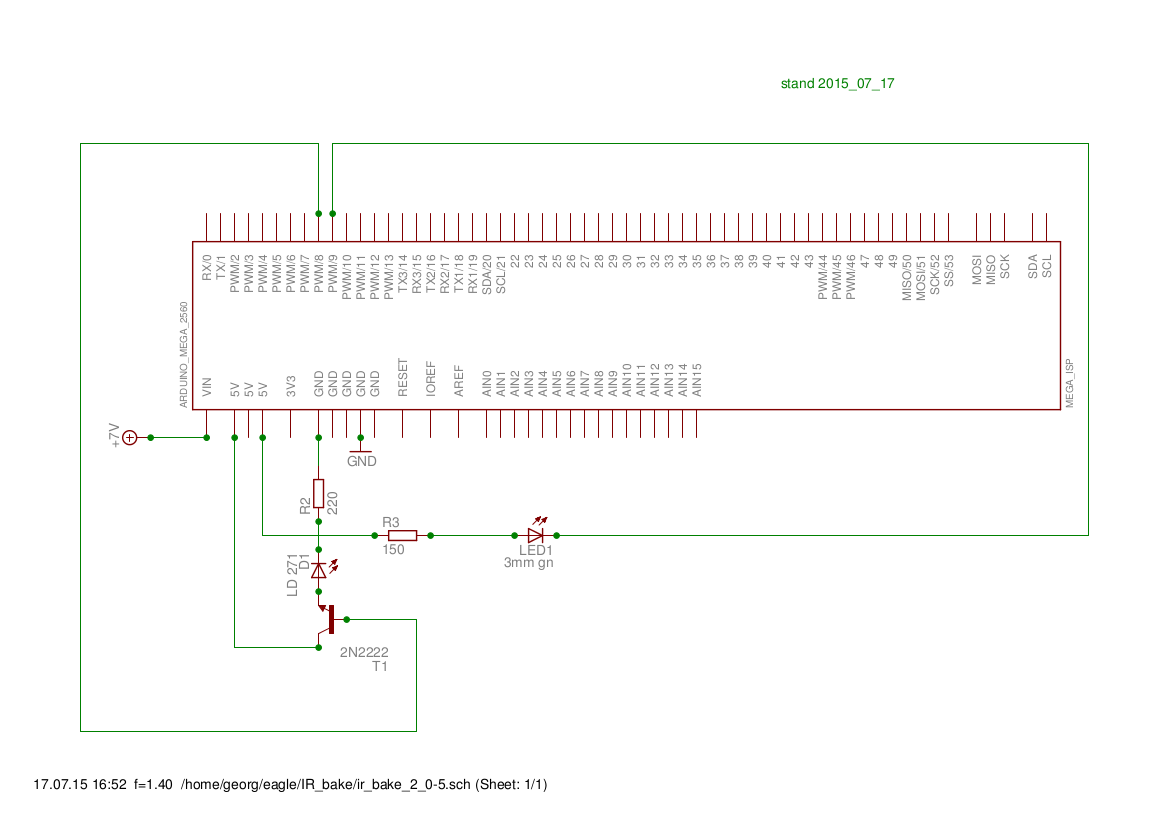

hallo, vielen dank für die antworten... @ArnoR: geändert, wie im schaltplan "ir_bake_2_0-5" gezeichnet, die LED blinkt, IR signal wird übertragen, aber im display (nur wirre zeichen..) @transistor: ich hänge hier doch noch den sketch (sender.ino) dran... ----------------------------- // http://www.meinduino.de/arduino-howto/2014/09/18/serielleuebertragung1.html // Damit die Pins schnell geschaltet werden können #include <digitalWriteFast.h> // Hier ist der Verstärker mit der IR-LED angeschlossen #define IRLED 8 #define LEDpin 9 // Globale Variablen für den Timer-Interrupt volatile uint8_t pinZustand = HIGH; volatile uint8_t sendenAn = false; /************************************************************* * * void setup() * * Wird einmal beim Programmstart ausgeführt * *************************************************************/ void setup() { pinMode(8, OUTPUT); // IRLED ist ein Ausgabe-Pin pinModeFast(IRLED, OUTPUT); pinMode(9, OUTPUT); noInterrupts(); // Jetzt keine Interrupts TIMSK1 |= (1<<OCIE1A); // Timer 1 Output Compare A Match Interrupt Enable TCCR1A = 0; // "Normaler" Modus // WGM12: CTC-Modus einschalten (Clear Timer on Compare match) // Stimmen OCR1A und Timer überein, wird der Interrupt // ausgelöst // Bit CS12 und CS10 setzen = Vorteiler: 8 TCCR1B = (1<<WGM12) | (1<<CS11); // Frequenz = 16000000 8 28 = rd. 71,428kHz, da jeweils an- und aus- // geschaltet wird, ergeben sich rund 36kHz Blinkfrequenz OCR1A = 28; interrupts(); // Interrupts wieder erlauben } /************************************************************* * * Interrupt Service Routine * * Wird aufgerufen, wenn der entsprechende Interrupt * ausgelöst wird * *************************************************************/ ISR(TIMER1_COMPA_vect) { noInterrupts(); if(! sendenAn) { // IR-LED ausschalten digitalWriteFast(IRLED, LOW); // Zustand der IR-LED merken pinZustand = LOW; interrupts(); return; } else { // IR-LED-Pin auf pinZustand schalten digitalWriteFast(IRLED, pinZustand); // pinZustand invertieren pinZustand = (pinZustand == HIGH) ? LOW : HIGH; } interrupts(); } /************************************************************* * * void loop() * * Wird immer wieder durchlaufen * *************************************************************/ void loop() { // Sender für 5ms ausschalten sendenAn = false; delay(5); //digitalWrite(9, LOW); // Das komplette Alphabet in Großbuchstaben senden for(int i='A'; i<='Z'; i++) //for(int i=1; i<=9; i++) { //Serial.write(i); sendIR(i); digitalWrite(8, LOW); digitalWrite(9, LOW); delay(250); // Kann entfallen, hier nur, damit man auf // dem Empfänger Zeit hat, die Buchstaben // zu verfolgen digitalWrite(8, HIGH); digitalWrite(9, HIGH); } //digitalWrite(9, HIGH); } /************************************************************* * * void sendIR(uint8_t dataByte) * * Sendet ein Byte seriell mit 1200bps über die IR-LED * * dataByte = Das Byte, das gesendet wird * *************************************************************/ void sendIR(uint8_t dataByte) { // Start-Bit sendenAn = false; delayMicroseconds(550); sendenAn = true; delayMicroseconds(230); // 8 Datenbits for(int i=0; i<8; i++) { // Falls LSB gesetzt... if(dataByte & B00000001 == 1) { // ... 36kHz-Signal aus (Seriell = Invertierte Logik)... sendenAn = false; delayMicroseconds(550); } else { // ... andernfalls 36kHz-Signal an sendenAn = true; delayMicroseconds(230); } // Das nächste Bit bitte dataByte >>= 1; } // Stopp-Bit sendenAn = true; delayMicroseconds(550); sendenAn = false; // kurze Pause delay(2); } ---------------------------------------- @wendelsberg: emitterschaltung invertiert nicht? gruss georg
Georg K. schrieb: > @wendelsberg: emitterschaltung invertiert nicht? Kommt darauf an: Wenn du als Ausgangssignal die Spannung am Kollektor betrachtest, dann invertiert sie. Das machst du aber nicht. Wenn du als Ausgangssignal den Strom durch die LED betrachtest, dann invertiert sie nicht. Sowohl in deinem ersten Schaltungsentwurf (Emitterschaltung) als auch in deiner jetzigen Schaltung, leuchtet die LED, wenn der µC-Pin auf high geht.
Achim S. schrieb: > Wenn du als Ausgangssignal den Strom durch die LED betrachtest, dann > invertiert sie nicht. Sowohl in deinem ersten Schaltungsentwurf > (Emitterschaltung) als auch in deiner jetzigen Schaltung, leuchtet die > LED, wenn der µC-Pin auf high geht. Aber beide Male leuchtet die gruene LED an PWM9, wenn dieser auf 0 ist. Da wird invertiert. wendelsberg
wendelsberg schrieb: > Aber beide Male leuchtet die gruene LED an PWM9, wenn dieser auf 0 ist. > Da wird invertiert. Mach die Invertierung in Software oder verkable die LED so: µC Pin -- Widerstand -- LED -- GND.
Max H. schrieb: > wendelsberg schrieb: >> Aber beide Male leuchtet die gruene LED an PWM9, wenn dieser auf 0 ist. >> Da wird invertiert. > Mach die Invertierung in Software oder verkable die LED so: > µC Pin -- Widerstand -- LED -- GND. naja, es geht hier aber mehr um die IR-LED, deren Reichweite eben durch die Emitterschaltung erhöht werden soll? Wird dort auch invertiert (PWM8=0 => IR-LED an?)? Letztendlich ist es für mich die Frage wie ich diese Reichweitenerweiterung erreiche, ohne durch die Phaseninversion das Senden innerhalb des IR-pulsbetriebs zu verhindern. Was die aufhebung der Hardwareinvertierung durch Software betrifft habe ich schon einiges probiert, funktioniert aber nicht... Was für Möglichkeiten habe ich sonst noch?
Georg K. schrieb: > Letztendlich ist es für mich die Frage wie ich diese > Reichweitenerweiterung erreiche, ohne durch die Phaseninversion das > Senden innerhalb des IR-pulsbetriebs zu verhindern. Was die aufhebung > der Hardwareinvertierung durch Software betrifft habe ich schon einiges > probiert, funktioniert aber nicht... Nichts für ungut, aber ich lese eine Menge aneinandergereihter Begriffe ohne zu kapieren, was wirklich deine Frage ist. Georg K. schrieb: > Wird dort auch invertiert > (PWM8=0 => IR-LED an?)? Das ist doch mal ne Frage, die ich kapiere. Wenn PWM8 auf High steht, dann leuchtet die LED. Und das gilt gleichermaßen für beide Schaltungsvarianten, die du vorgestellt hast. In der zweiten Variante (Kollektorschaltung) leuchtet sie etwas weniger hell (da ein bisschen mehr Spannung am Transistor hängen bleibt). In der ersten Variante (Emitterschaltung) sind die Schaltflanken wohl etwas schlapper (wegen der Sättigung des Transistors). In beiden Fällen ist die Intensität der IR-Diode nicht sehr hoch, da du weniger als 20mA durch die IR-Diode schickst. Die meisten Sendedioden können deutlich größere Ströme vertragen. Aber wenn dein Empfänger Unsinn anzeigt, muss das nicht unbeding ein Reichweitenproblem sein. Oder klappt die Übertragung plötzlich, wenn du Sender und Empfänger näher zusammenbringst? Es kann ebensogut ein Timing-Problem deiner Software sein. Ein bisschen komisch finde ich, dass du indirekte Steuerung der LED (über sendeAn) und direktes Schreiben an den Port (über digitalWrite(8, HIGH);) mischst. Bist du sicher, dass sich das nicht beist? Hast du irgendwelche Messmöglichkeiten, um das Timing des IR-Signals zu überprüfen?
Hi Achim, Also: ich habe einen RP6-Roboter ( http://rn-wissen.de/wiki/index.php/RP6 ) und beschäftige mich damit ihn autonom herumfahren zu lassen. Er soll im Bedarfsfall seine Ladestation ( http://rn-wissen.de/wiki/index.php/Induktive_Ladestation_für_den_RP6 ) finden können, dabei sollen ihm außer einem Kompass auch IR-Baken ( http://rn-wissen.de/wiki/index.php/IR-bake_für_den_RP6 ) helfen. IR-Signale kann er über sein ACS empfangen, das funktioniert auch über die 5m gut... Die analogen Baken haben eine Reichweite von gut 5 Metern, sind allerdings „dumm“ – sie senden halt nur ein mit 36kHz moduliertes Blinksignal (welches der RP6 braucht), deshalb jetzt der Versuch mit einer digitalen Bake, basierend auf Arduino mega 2560. Der Pin des Arduino liefert maximal 20mA, was für eine Reichweite von ca. 15 cm reicht, für mehr aber nicht. Verstärkt mit der Emitterschaltung komme ich auch auf die ca. 5 m Reichweite, möchte aber nun die Intelligenz des mc auch für eine Kommunikation der Bake mit dem Roboter nutzen. Die Software (sender_1.ino) stammt nicht von mir und offen gesagt verstehe ich sie auch nur bruchstückhaft. Der Arduino-Sender und Arduino-Empfänger funktionieren so weit, dass die gesendeten 36kHz „Grundsignale“ auch vom Empfänger empfangen werden, nicht aber die gesendeten Buchstaben, sondern nur irgendwelche „wirren“ zeichen... Die Ursache dachte ich in der Tatsache gefunden zu haben, dass die Emitterschaltung neben des Verstärkens des Signal diesen auch invertiert, während die Software von einer nicht invertierenden Schaltung ausgeht. Da diese wirren Zeichen aber auch über die Collectorschaltung empfangen werden scheint diese These zu widerlegen... Um aud Deine Fragen einzugehen: Ich bin alles andere als sicher, dass sich die indirekte Steuerung der IR-LED (über sendeAn) und direktes Schreiben an den Port (über digitalWrite(8, HIGH);) nicht beist. Auch fehlen mir die Messmöglichkeiten, um das Timing des IR-Signals zu überprüfen...
Georg K. schrieb: > Der Pin des Arduino liefert maximal 20mA, was für eine Reichweite von > ca. 15 cm reicht Wie hast du die LED dabei verschalten?
Max H. schrieb: >> Der Pin des Arduino liefert maximal 20mA, was für eine Reichweite von >> ca. 15 cm reicht > Wie hast du die LED dabei verschalten? so, wie die grüne LED am Pin 9 im Schaltplan im ersten post, also zunächstmal ohne den Transistor...
Georg K. schrieb: > Der Pin des Arduino liefert maximal 20mA, was für eine Reichweite von > ca. 15 cm reicht, für mehr aber nicht. Verstärkt mit der > Emitterschaltung komme ich auch auf die ca. 5 m Reichweite, möchte aber > nun die Intelligenz des mc auch für eine Kommunikation der Bake mit dem > Roboter nutzen. Das kann ich schon mal nicht nachvollziehen, denn deine Transistorschaltung ist so dimensioniert, dass ebenfalls weniger als 20mA fließen (oder in deinem Schaltplan ist der Wert von R2 falsch angegeben). Wenn ich dich richtig verstehe funktioniert die "dumme" Lichtbarkenfunktion also über 5m, aber die "intelligente" Übermittlung von Zeichen liefert immer Unsinnszeichen (egal welcher Abstand)? Dann würde ich mal nicht davon ausgehen, dass du ein Reichweitenproblem hast, sondern dass die Kodierung der Zeichen oder das Timing der Übermittlung nicht stimmen. Ohne echtes Verständnis des Originalcodes und ohne Messmöglichkeiten wird es nicht einfach, den Fehler zu finden. Als erstes würde ich mal das direkt (statische) Setzen der Ausgänge mit digitalWrite(8, HIGH) rauswerfen und nur das (36kHz-modulierte) Steuern der Ausgänge mit sendenAn benutzen - ich glaube nicht, dass beides zusammen gut gehen kann. Dann würde ich versuche sicher zu stellen, dass die Einstellungen des Empfängers zu der des Senders passen (stimmt das Timing von 1200bps? Stimmt die Codierung?) Unter "sein ACS" kann ich mir leider nichts konkretes vorstellen, da musst du nachlesen, was für Einstellungen für die Übertragung genau zu machen sind. Auch kommt es mir komisch vor, dass die Modulation per Timer-ISR gemacht wird, die Bitlänge aber per delayMicroseconds. Wenn dieser Satz aus einem Arduino-Forum stimmt, dann kann das nicht gutgehen: "The delayMicroseconds() function will provide accurate delays as may be needed for some types of applications (e.g. SofwareSerial bit banging) by disabling interrupts during its core delay code" Wenn DelayMicroseconds wirklich die Interrupts disabled, dann schaltest du damit auch die 36kHz Modulation aus. Wenn es das nicht tut, dann werden die zumindest die Bitzeiten ungenau, weil delayMicroseconds häufig durch den Timer-Interrupt unterbrochen wird. Sieht für mich nicht nach einer funktionsfähigen Kombination aus, auch wenn es in deiner Code-Vorlage ebenso gemacht wird. (Allerdings kenne ich mich zugegebenermaßen mit den Arduino-Routinen nicht aus).
Achim S. schrieb: > Wenn ich dich richtig verstehe funktioniert die "dumme" > Lichtbakenfunktion also über 5m, aber die "intelligente" Übermittlung > von Zeichen liefert immer Unsinnszeichen (egal welcher Abstand)? die analoge Bake sendet nur einfache Blinkzeichen (2Hz z.b.), die werden vom Empfänger (egal ob RP6 oder Arduino) auch als solche erkannt und der Empfang mit einer im gleichen Rhythmus blinkenden LED signalisiert. Das macht die digitale Bake auch. > Dann würde ich mal nicht davon ausgehen, dass du ein Reichweitenproblem > hast, sondern dass die Kodierung der Zeichen oder das Timing der > Übermittlung nicht stimmen. was die Überbrückung der 5m betrifft hatte ich wirklich mit der normalen IR-LED ohne die Verstärkerschaltung Probleme mit der Entfernung, mit dem Transistor als Verstärker nicht. Aber das ist nicht die Ursache für die wirren zeichen die der Arduino-Empfänger vom Arduino-Sender empfängt. Und der Abstand auch nicht. > Als erstes würde ich mal das direkt (statische) Setzen der Ausgänge mit > digitalWrite(8, HIGH) rauswerfen und nur das (36kHz-modulierte) Steuern > der Ausgänge mit sendenAn benutzen habe ich gemacht. > Dann würde ich versuche sicher zu stellen, dass > die Einstellungen des Empfängers zu der des Senders passen (stimmt das > Timing von 1200bps? Stimmt die Codierung?) beides wohl nicht. Ich habe jetzt die Zählschleife in der Sendefunktion rausgenommen un sende bei jedem Durchlauf jetzt die gleiche Zahl. Beim Empfänger habe ich die Codierung in der er die Zeichen darzustellen hat hinzugefügt (DEC). Jetzt passiert folgendes: Sende ich eine 5, kommt im Display eine 16, sende ich eine 6, kommt eine 0. Hängt das evtl. mit dem bitweise senden zusammen? Ist noch nicht fertig, aber die zusammenhänge werden klarer.. danke erstmal...
Georg K. schrieb: > Max H. schrieb: > Der Pin des Arduino liefert maximal 20mA, was für eine Reichweite von > ca. 15 cm reicht > > Wie hast du die LED dabei verschalten? > > so, wie die grüne LED am Pin 9 im Schaltplan im ersten post, also > zunächstmal ohne den Transistor... Dann sollte es klappen, wenn du die IR-LED mit einem PNP bzw. P-MOS highside schaltest.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.