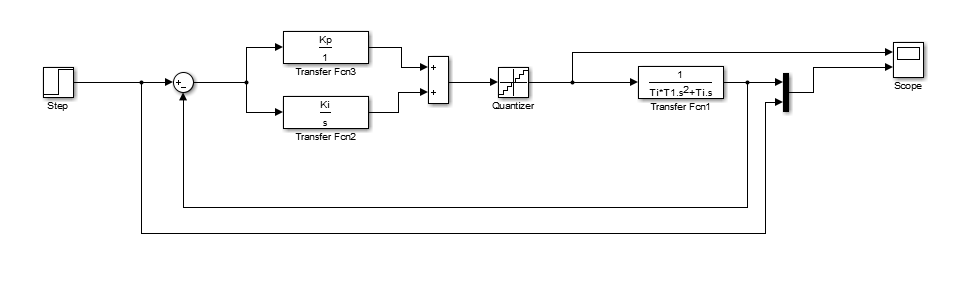
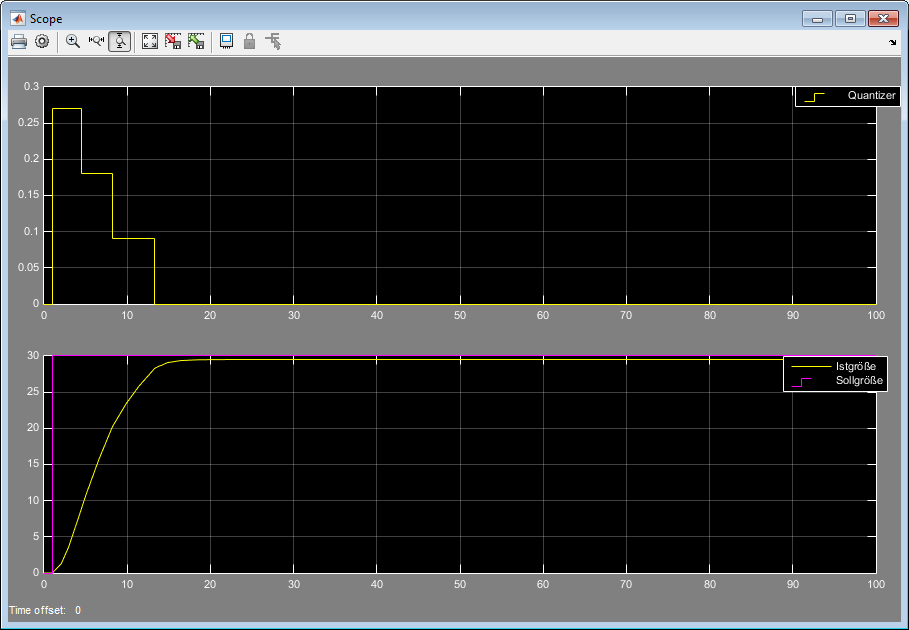
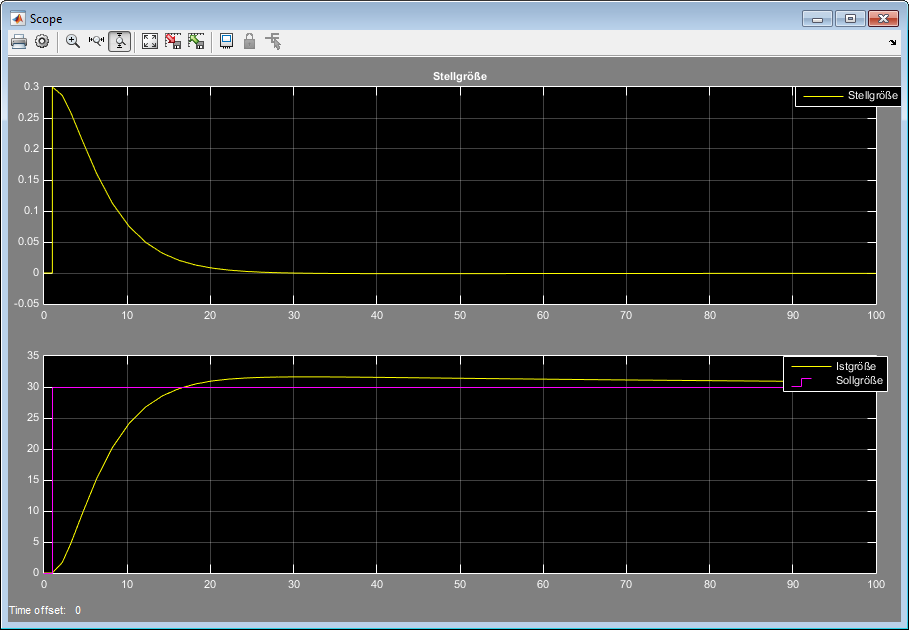
Hallo Leute, ich möchte ein bisschen über Regelungstechnik lernen deshalb baue ich gerade eine Wippe die einen Ball auf einer Position halten soll. Das ganze besteht aus zwei Schienen (1m lang) die mittig gelagert sind und von einem Schrittmotor geneigt werden(Der Motor greift ebenfalls mittig an). Zwischen den Schienen rollt der Ball. Am Ende sitzt ein IR-Distanzsensor zur Positionserfassung. Zur Regelung: Zuerst habe ich eine Sprungantwort aufgenommen und damit die Strecke identifiziert. Eigentlich wäre es ein I2T1, da ich das mit einem PI-Regler allerdings nicht regeln kann geh ich erstmal von einem IT1 aus. Im Bodediagramm habe ich dann den PI-Regler angepasst um eine vernünftige Phasenreserve zu erreichen. Anschließend wurde das ganze in Simulink simuliert. Und jetzt zum Grund warum ich den Beitrag hier eröffne: Ich stelle die Sollgröße auf 30cm. Der Ball rollt und bleibt dann mit Regelabweichung liegen (eigentlich rollt er ganz langsam zurück aber dass beachte ich jetzt mal nicht). Nun kann aber mein Schrittmotor nur mit einer Genauigkeit von 0,09° stellen also hab ich den Quantizer-Block eingefügt der genau dise Abstufung durchführt. Jetzt rollt der Ball und sobald die Stellgröße Null wird rollt der Ball aus und bleibt dann liegen. In dieser Simulation sind das jetzt etwa 7 Sekunden. Aber woher weiß das System, dass der Ball hier nur die 7 Sekunden zum ausrollen braucht und der Schwung nicht viel größer ist? Geht das alles aus der gemessenen Sprungantwort der Strecke hervor? Ps: Ich weiße dass der Aufbau nicht ideal ist und die Regelung dadurch sehr langsam, mir geht es im Moment eher um die Frage zum Schluss.
Angehängte Dateien:
Könntest du noch eine Skizze anfügen?
Angehängte Dateien:
-

20141007_232524_kl.jpg
170 KB
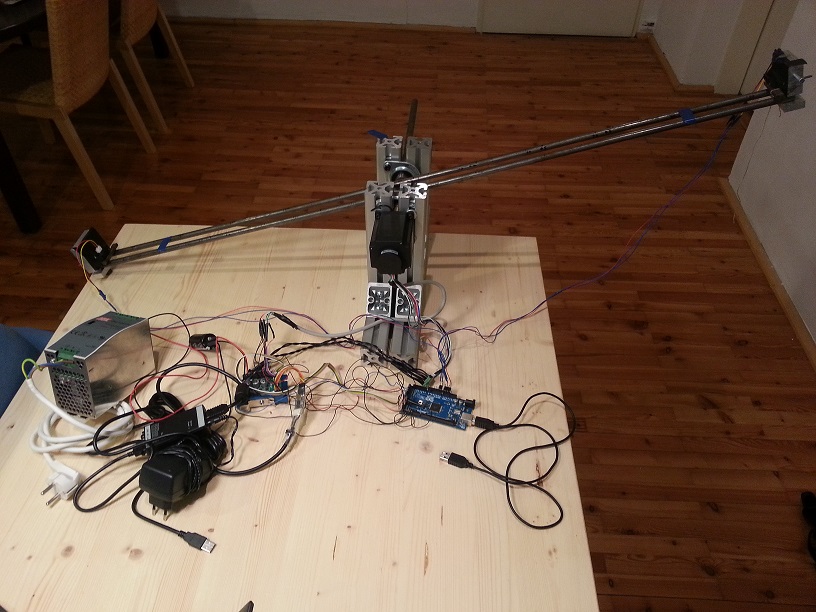
Ist noch ein älteres Foto. Mittlerweile bestehen die Schienen aus leichteren Alurohren und auch die Halterungen der Sensoren an den Enden der Wippe sind leichter aus Kunststoff gebaut worden. Der Motor hängt direkt mit einer starren Kupplung an der Wippe. Wie gesagt das System ist alles andere als ideal. Mit einem Getriebe wäre das ganze wahrscheinlich sehr viel genauer und schneller Regelbar.
Das Modell stimmt leider nicht. Ist aber vorerst mal egal. Die Streckenparameter beinhalten das Verhalten. Zum Modell. Die Wirklichkeit ist viel komplizierter. 1) hinunterrollen setzt potentielle Energie in kinetische Energie um 2) Kinetische Energie beinhaltet sowohl Geschwindigkeit, wie auch Rotation. Das ist moeglicherweise ein nichtlineares System. Damit waere eine Schrittantwort dann ungenuegend. Moeglicherweise ist das aber egal, dh genuegt die lineare Approximation.
Michael H. schrieb: > Aber woher weiß das System, dass der Ball hier nur die 7 Sekunden zum > ausrollen braucht und der Schwung nicht viel größer ist? Geht das alles > aus der gemessenen Sprungantwort der Strecke hervor? Das system weiss eigentlich nicht viel. Also was der Ball so macht. Es weiss nur, was es machen soll, wenn es weiss, wo sich der Ball befindet und der Ball hinsoll. Hier gibst du ja die berechnete position des Balls auf dem Regler. In wirklichkeit ist es ja die tatsächliche Position, welche von den Sensoren kommt. Das system weiss also nur, dass die Regelabweichung ab diesem moment so gering ist, dass diese keine Stellgröße mehr geben muss. Rollt der Ball zu weit, wird die Regelabweichung wieder höher und der Motor dreht sich in die andere richtung, sodass der Ball wieder zurück rollt. Ps.: Wenn es wirklich zum üben ist, würde ich nicht einfach nur eine Sprungantwort aufnehmen, sondern zunächst ein mathematisches Modell im sinne von Differentialgleichung, Übertragungsfunktion oder Zustandsraum (das sind die die ich kenne) aufstellen. Daran kannst du dann erkennen, um was für ein System es sich handelt und es wenn nötig linearisieren und einen Regler dafür auslegen
Ein Regler, sowie die Strecke sind beides Differentialgleichungen, und deren Verhalten ist in den Parametern.
Oder D. schrieb: > Ein Regler, sowie die Strecke sind beides Differentialgleichungen, und > deren Verhalten ist in den Parametern Ja, dass stimmt. ich denke, ich habe mich falsch ausgedrückt. Was ich meinte, ist es die Gleichungen anhand Physikalischer Gleichungen aufzustellen und nicht aus einer Sprungantwort zu ermitteln. Aber ich habe das Problem eh falsch gelesen. Es geht ja auch um das Modell. Ja, das Modell weiss wie weit der Ball rollt anhand der Parameter.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.