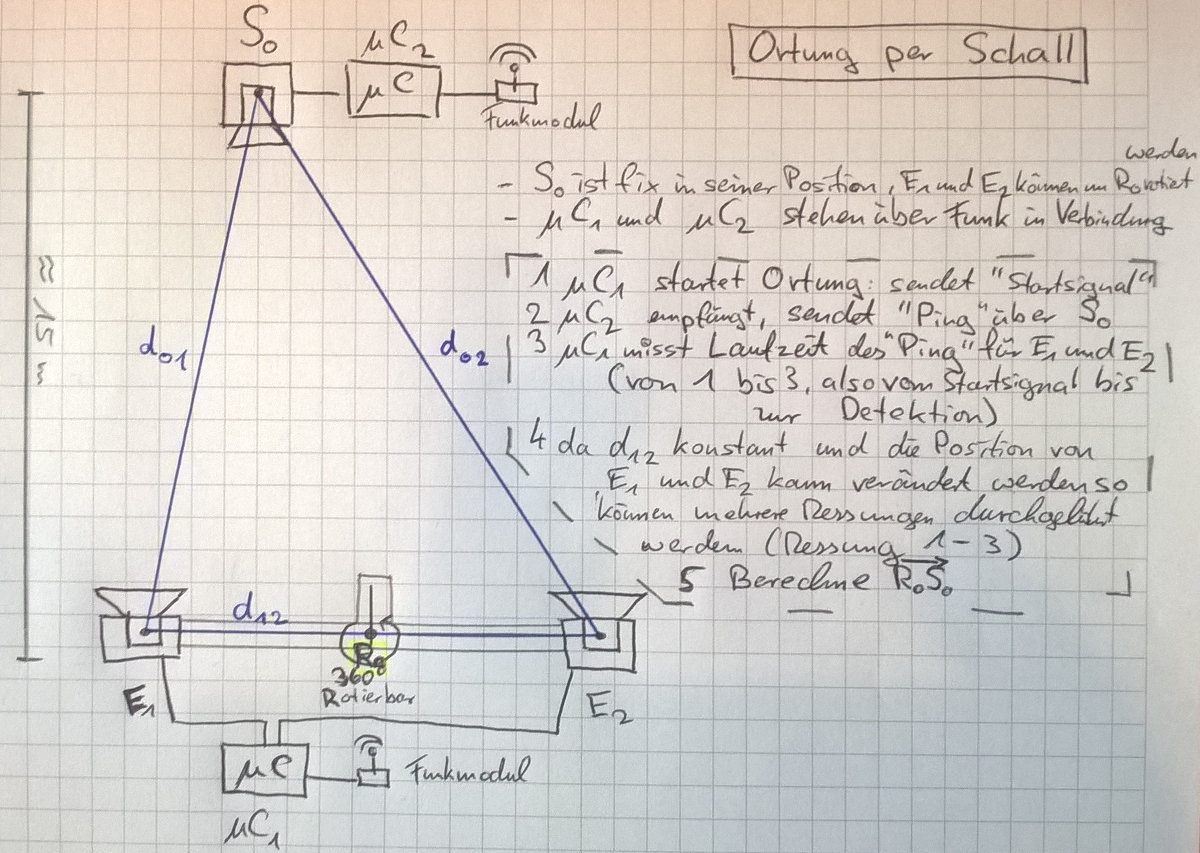
Hallo Vorweg: - Ich hab die Suche bemüht (Google, mikrocontroller.net), aber nicht gefunden was ich gesucht habe. - Ich bin kein Elektroniker sondern "nur" Student für Angewandte Informatik (sonst würde ich die Frage hier vermutlich nicht stellen) daher habt bitte Nachsehen falls ich nicht alles auf Anhieb verstehe. Was ich grob machen will: Im Grunde will ich eine (Ultra)Schall-Quelle über Triangulation mit 2 (Ultra)Schall-Empfängern Orten. Was ich suche: Ich suche ein fertiges Bauteil/Modul mit dem ich über einen Mikrocontroller (Atmega328p) (Ultra)Schall-Signale aussenden kann und ein Bauteil mit dem ich das ankommende Signal detektieren kann. Als Herausforderung existiert nur dass es für eine Entfernung von mindestens 15 Meter funktionieren muss. Als Genauigkeit reicht +/- 15 cm um die wirkliche Signalquelle aus. Optional auch noch wasserdicht. Wie genau: - siehe Bild im Anhang als grobe Erklärung. Falls die Schrift eventuell unleserlich ist: - S0 (Sender/Signal-Quelle) ist fix in seiner Position - E1 und E2 (Empfänger) sind im fixen Abstand zueinander und können um R0 (Mittelpunkt der Stecke d12) mit 360° rotiert werden - uC1 und uC2 stehen über Funk in Verbindung - Entfernung zwischen S0 und R0 zwischen 0 m und ca. 15 m 1 uC1 startet Ortung: sendet "Startsignal" 2 uC2 empfängt "Startsignal", sendet "Ping" über S0 3 uC1 misst Laufzeit des "Ping"s für E1 und E2 (von 1 bis 3, also Startsignal bis zur Detektion) 4 da d12 konstant und die Position von E1 und E2 kann über die Rotation verändert werden kann. Können mehrere Messungen (1-3) durchgeführt werden. 5 Berechne Vektor(R0, S0) aus Messwerten. Ein "Ping" sind natürlich eine Folge von Signalen. Die Berechnung des Vektors aus den Messwerten krieg ich hin. Die Laufzeit des Signals ist natürlich länger als, es kommt ein Offset durch das Senden/Empfängens des "Startsignals" drauf. Den kann ich ja raus rechnen. Was ich bereits probiert habe: Ich hab bereits einen Testaufbau mit billigen Arduino Ultraschall-Entfernungsmessern HC-SR04 ausprobiert (Abdichten der Empfänger auf S0-Seite und der Sender auf E1-Seite und E2-Seite). Das hat sogar ganz gut funktioniert, aber der Sensor schafft nur bis 3 m (meine Messungen waren bis 2 m noch verwertbar). Aber was ungenügend sind ist einerseits die zu niedrige Entfernungn, als auch das ich keinen Zugriff auf das detektierte Signal habe und auch noch die Sender/Empfänger mit schleppe (inkl. Auswertungsschaltung). Ich brauche als keine Bauteil zur Ultraschall-Entfernungsmessung sondern nur fertige Bauteile zum Aussenden und Detektieren von Schall-Signalen. Ultraschall ist immer in Klammern geschrieben, da ich ggf. mit niedrigeren Frequenzen größere Entfernungen realisieren kann. (Quelle: http://www.imd.uni-rostock.de/fileadmin/IEF_IMD/veroeff/schneider_wehden_salomon_daga06.pdf ) Unterschied: 40 KHz Entfernung 18,0 m zu 5 KHz Entfernung 50,0 m Ich kenne mich damit nicht besonders aus kann man mir hier ein paar Tipps geben? Falls Unklarheiten bezüglich meiner Angaben bestehen, bitte nachfragen ich werde gerne alles klären. Ich hoffe mir kann jemand weiterhelfen, mir ein passsendes Bauteil verraten und mir eventuell ein paar zusätzliche Tipps geben. Vielen Dank schon mal im voraus =)
Angehängte Dateien:
-

SketchOrtungPerSchall.jpg
200 KB
Hallo Gabriel, mir ist nicht ganz klar, ob Du den kompletten Vektor R0-S0 oder nur die Richtung von E1/E2 in Bezug zu S0 berechnen willst. Im letzten Fall würde es doch reichen nur die Zeitdifferenz der Empfänger zu nutzen. Frank
Frank R. schrieb: > Hallo Gabriel, > > mir ist nicht ganz klar, ob Du den kompletten Vektor R0-S0 oder nur die > Richtung von E1/E2 in Bezug zu S0 berechnen willst. Im letzten Fall > würde es doch reichen nur die Zeitdifferenz der Empfänger zu nutzen. > > Frank Hallo Frank, ich suche den kompletten Vektor R0-S0, da in einem Vektor sowohl die Richtung als auch die Entfernung steckt (deswegen habe ich extra Vektor geschrieben :) ) Durch den Laufzeitunterschied der Signale komm ich auf die Richtung, das ist mir bewusst. Und durch die Laufzeit komme ich an die Länge.
Gabriel H. schrieb: > Durch den Laufzeitunterschied der Signale komm ich auf die Richtung, das > ist mir bewusst. Nein, der Laufzeitunterschied ist eine Hyperbel, siehe Loran-Ortung. Erst der Schnittpunkt mit der Laufzeit ergibt den Ort.
So ein System habe ich vor Jahrzehnten (in den vor-GPS Zeiten) mit dem Apple ][ und einem 'Ultraschallhutsender' realisiert (der Archäologe wollte seinen Standort innerhalb des Grabungsfeldes lokalisieren). Es entsteht aber eine prinzipbedingte Mehrdeutigkeit, da du nur 2 Empfänger benutzt. Für den Archäologen war das nicht wichtig, ist aber nicht immer so. Als Geber benutzten wir eine Anordnung von 4 Piezohochtönern als Sender und normale (HC04) Empfänger mit AGC. Wir haben auf 433Mhz ein hartes OOK Signal übertragen und mit dem Start des letzten Bit den Ultraschall Burst gesendet. Der Burst wurde von einem 35kHz Oszillator, induktiv hochgespannt auf 200Vss, erzeugt und auf die parallelgeschalteten Piezos gegeben. Damals war er Geber ein MCS51 Board und der Empfänger eben ein Apple ][(c). Die Reichweite war etwa 50-60m, aber nur deswegen, weil wir recht 'laut' gesendet haben. Heute wäre so etwas vermutlich ein Grund für die Tierschützer, auf die Barrikaden zu gehen.
Gabriel H. schrieb: > Was ich grob machen will: > Im Grunde will ich eine (Ultra)Schall-Quelle über Triangulation mit 2 > (Ultra)Schall-Empfängern Orten. Warum willst du bei der Geometrie unbedingt Triangulation betreiben. Es reicht doch völlig, die Phasenverschiebung zu bestimmen.
Matthias S. schrieb: > Es > entsteht aber eine prinzipbedingte Mehrdeutigkeit, da du nur 2 Empfänger > benutzt. Jeder Empfänger erzeugt einen Kreis als Standlinie entsprechend der Laufzeit. 2 Kreise schneiden sich zwar in 2 Punkten, aber der richtige ist leicht abschätzbar. Bei Piezos erreicht man eine gute Abstrahlung nur auf der mechanischen Resonanzfrequenz und die ist identisch mit der elektrischen Serienresonanz. Der Sender sollte deshalb optimal auf der Serienresonanz selbsterregt sein. Allerdings ist im Resonanzfalle auch die Einschwingzeit des Piezos am größten, was zu Fehlmessungen führen kann. Bei größerer Entfernung ist dieser Fehler aber unbedeutend und bei einer Differenzmessung hebt er sich heraus. Wolfgang schrieb: > Es reicht doch völlig, die Phasenverschiebung zu bestimmen. Theoretisch und bei kleinen Entfernungsdifferenzen. Praktisch sind die Signale aber nicht so eindeutug.
Gabriel H. schrieb: > Im Grunde will ich eine (Ultra)Schall-Quelle über Triangulation mit 2 > (Ultra)Schall-Empfängern Orten. Was du bisher garnicht definiert hast (oder habe ich es übersehen?) ist die geforderte Genauigkeit. Die ist sowwieso immer wichtig, und in diesem Fall ergibt sich ein prinzipielles Problem dadurch, dass die Schallgeschwindigkeit deutlich von Luftdichte und Temperatur abhängig ist. Nebenbei bemerkt, es gibt für bestimmte Messdaten natürlich 2 Punkte, die in Frage kommen - man kann deine Zeichnung ja an der Geraden durch E1 und E2 spiegeln. Georg
Georg schrieb: > Die ist sowwieso immer wichtig, und in > diesem Fall ergibt sich ein prinzipielles Problem dadurch, dass die > Schallgeschwindigkeit deutlich von Luftdichte und Temperatur abhängig > ist. Nicht nur das. Die Laufzeit hängt natürlich auch noch von der Windgeschwindigkeit ab ;-)
eric schrieb: > Wolfgang schrieb: >> Es reicht doch völlig, die Phasenverschiebung zu bestimmen. > > Theoretisch und bei kleinen Entfernungsdifferenzen. Praktisch sind die > Signale aber nicht so eindeutug. Mehrdeutigkeiten lassen sich idR. durch niederfrequente Signalanteile, z.B. Verwendung von Wellenpaketen ausräumen. Die KKF verliert dadurch ihre Periodizität.
Matthias S. schrieb: > So ein System habe ich vor Jahrzehnten (in den vor-GPS Zeiten) mit dem > Apple ][ und einem 'Ultraschallhutsender' realisiert (...) > Tierschützer, auf die Barrikaden zu gehen. Das ist eine wirkliche coole Sache. Sowas in die Richtung brauche ich auch, aber ich habe eben 2 Empfänger die fix in einem Abstand zueinander montiert sind, und man kann es rotieren kann. eric schrieb: > Bei Piezos erreicht man eine gute Abstrahlung nur auf der mechanischen > Resonanzfrequenz und die ist identisch mit der elektrischen > Serienresonanz. > Der Sender sollte deshalb optimal auf der Serienresonanz selbsterregt > sein. > Allerdings ist im Resonanzfalle auch die Einschwingzeit des Piezos am > größten, was zu Fehlmessungen führen kann. > Bei größerer Entfernung ist dieser Fehler aber unbedeutend und bei einer > Differenzmessung hebt er sich heraus. Danke für die Idee, ich versteh noch nicht alles. Kannst du mir 1-2 Bauteile schicken welche du vorschlagen könntest um das zu verwirklichen? Georg schrieb: > Was du bisher garnicht definiert hast (oder habe ich es übersehen?) ist > die geforderte Genauigkeit. Die ist sowwieso immer wichtig, und in > diesem Fall ergibt sich ein prinzipielles Problem dadurch, dass die > Schallgeschwindigkeit deutlich von Luftdichte und Temperatur abhängig > ist. Wie oben geschrieben: Als Genauigkeit reicht +/- 15 cm um die wirkliche Signalquelle aus. Optional auch noch wasserdicht. Es geht vielleicht sogar +/- 30, muss ich ausprobieren wenn es funktioniert. Georg schrieb: > Nebenbei bemerkt, es gibt für bestimmte Messdaten natürlich 2 Punkte, > die in Frage kommen - man kann deine Zeichnung ja an der Geraden durch > E1 und E2 spiegeln. Mathematisch ja,ich ging aber davon aus, dass die Empfänger bautechnisch bedingt nur einen begrenzten "Empfangswinkel" nach Vorne haben. Der dann nicht 360°, sondern maximal 180° sein wird. Wolfgang schrieb: > Georg schrieb: >> Die ist sowwieso immer wichtig, und in >> diesem Fall ergibt sich ein prinzipielles Problem dadurch, dass die >> Schallgeschwindigkeit deutlich von Luftdichte und Temperatur abhängig >> ist. > > Nicht nur das. Die Laufzeit hängt natürlich auch noch von der > Windgeschwindigkeit ab ;-) Das ist mir bewusst, ich hab das jetzt einfach mal dreist als Ungenauigkeit in der Messung angenommen, und rechne das eventuell über zusätzliche Sensoren (später) noch raus. Im Grunde brauch ich "nur" einen Sender und Empfänger für (Ultra)Schall den ich mit dem Atmega328p benutzen kann. Ich hab mir das in etwa so vorgestellt: - Am Sender über PWM den "Ping" senden - Am Empfänger das Signal über den ADC-Samplen und Signale auswerten. oder: - Sendermodul wird von Atmega gestartet, sender "Ping" automatisch - Empfängermodul detektiert "Ping" selbstständig und setzt Pin auf High/Low auf den ich dann mit dem Atmega reagieren kann. Die 2-Teile Lösung würde mir am besten gefallen, und ich suchen eben 2 solcher Module die fertig sind und eben mit meinen Anforderungen ( funktioniert mit 15 Meter Entfernung). Meinen Aufbau hab ich hinzugefügt, da die Frage sonst früher oder später immer kommt :)
Angehängte Dateien:

{kind=link}
Statt Ultraschall nehme Lidar. Ich habe mit dieses Handgerät herumgespielt, ist wirklich Hargenau, weniger als 1 mm Abweichung. Für Arduino gibt es so etwas: http://www.robotshop.com/en/lidar-lite-laser-rangefinder-pulsedlight.html Diese messt bis 60m die Distanz 0.025m genau. Mit i2c interface. Preis: $85,-
Gabriel H. schrieb: > Im Grunde brauch ich "nur" einen Sender und Empfänger für (Ultra)Schall > den ich mit dem Atmega328p benutzen kann. Ich hab mir das in etwa so > vorgestellt: > - Am Sender über PWM den "Ping" senden Mir ist immer noch nicht klar, wozu die Entfernungsmessungen gut sein sollen. Es würde doch vollkommen ausreichen, den Winkel E1-R0-S0 zu messen. Alle anderen Größen scheinen nach der bisherigen Beschreibung doch fest zu sein.
Geert H. schrieb: > Statt Ultraschall nehme Lidar. > Ich habe mit dieses Handgerät herumgespielt, ist wirklich Hargenau, > weniger als 1 mm Abweichung. > > > Für Arduino gibt es so etwas: > http://www.robotshop.com/en/lidar-lite-laser-rangefinder-pulsedlight.html > Diese messt bis 60m die Distanz 0.025m genau. Mit i2c interface. > Preis: $85,- Das ist eigentlich eine ganz tolle Sache, aber leider nehm ich damit die komplette Umgebung war, und weiß dann nicht wirklich wo S0 liegt, da ich "nur" die Umgebung, aber nicht das eigentliche Ziel wahrnehme. Ich hab also Probleme die Box in der der Mikrocontroller liegt von der Umgebung zu unterscheiden. (siehe Szenario unten, dann siehst du warum die Idee leider nicht für mich funktionieren wird) Aber das hat mich auf eine Idee gebracht: Man kann S0 durch eine InfrarotLED ersetzen, und an R0 einen Infrarot-Sensor anbringen mit einer vertikalen Blende (das entspricht dan einem kleinen "Empfangswinkel). Anschließen S0 langsam rotieren lassen bis man die LED (also S0) registriert. Dann hat man zumindest eine Richtung, aber keine Entfernung. Ob das aber bis 15 Meter funktioniert, und in wie fern Sonne dann störend ist, und ich erinnere mich das Photodetektoren allgemein sehr träge sind. Wolfgang schrieb: > Gabriel H. schrieb: >> Im Grunde brauch ich "nur" einen Sender und Empfänger für (Ultra)Schall >> den ich mit dem Atmega328p benutzen kann. Ich hab mir das in etwa so >> vorgestellt: >> - Am Sender über PWM den "Ping" senden > > Mir ist immer noch nicht klar, wozu die Entfernungsmessungen gut sein > sollen. Es würde doch vollkommen ausreichen, den Winkel E1-R0-S0 zu > messen. Alle anderen Größen scheinen nach der bisherigen Beschreibung > doch fest zu sein. Ich seh schon, ich hab das Szenario nicht genau genug beschrieben. S0 ist nur ein Beispielstandort. S0 kann auch näher oder weiter weg von R0 liegen. Ebenso kann S0 auch weiter rechts oder links von R0 liegen. Theoretische liegt S0 also irgendwo innerhalb eines 15 Meter Radius um R0. Ich mach mal das Szenario genauer. Stell dir du steckst einen Stab ein den Boden deines Gartens, und oben drauf ist ein Servo montiert der sich 360° drehen kann. Rotationspunkt des Servos ist R0 Auf dem Servo ist mittig eine Stange montiert (E0-E1), rechts und links am Ende der Stange ist E1 und E2 angebracht. Das ganze System wird durch einen Atmega328p gesteuert, der ein Funkmodul besitzt, über dem er mit einem Sensor kommunizieren kann. Dieser Sensor ist S0 und liegt als Plastikbox irgendwo im Garten auf dem Boden (mit der Einschränkung im 15 Meter Radius um die Stange). Jetzt will ich über mein Verfahren die Position der Plastikbox im Garten relativ zur Stange bestimmen (Höhenunterschiede mal weggelassen).
Gabriel H. schrieb: > Jetzt will ich über mein Verfahren die Position der > Plastikbox im Garten relativ zur Stange bestimmen > (Höhenunterschiede mal weggelassen). So ganz verstehe ich Dein Problem nicht. In Deiner Skizze im ersten Beitrag ist davon die Rede, dass Sender und Empfänger über Funk in Kontakt stehen. Dann ist die Sache doch simpel - Prinzip "Blitze auszählen": Der Sender sendet immer gleichzeitig einen US-Burst und ein Funksignal. Der Empfänger dreht das Richtmikrofon so lange, bis er erstmal irgendwas hört. Dann gleicht er den Seitenwinkel so lange fein ab, bis die empfangenen US-Bursts links und rechts genau GLEICHZEITIG eintreffen. Jetzt liegt der US-Sender genau auf der Mittelsenkrechten; der Seitenwinkel ist jetzt also bekannt. Die Schrägentfernung ergibt sich aus dem Laufzeitunterschied zwischen Blitz und Donner... sprich: zwischen Ultraschall und Funk.
Gabriel H. schrieb: > ... und ich erinnere mich das Photodetektoren allgemein sehr träge sind. Das kommt drauf an, was du als "träge" bezeichnest. Ein Lidar läuft mit Photodetektoren und da entspricht eine Entfernung von ein Meter etwa 7ns (0.000000007s). Wenn damit auf Millimeter genau gemessen wird, werden also Signal noch auf besser als 10 Pikosekunden aufgelöst.
Possetitjel schrieb: > Gabriel H. schrieb: > >> Jetzt will ich über mein Verfahren die Position der >> Plastikbox im Garten relativ zur Stange bestimmen >> (Höhenunterschiede mal weggelassen). > > So ganz verstehe ich Dein Problem nicht. > > In Deiner Skizze im ersten Beitrag ist davon die Rede, > dass Sender und Empfänger über Funk in Kontakt stehen. > Dann ist die Sache doch simpel - Prinzip "Blitze auszählen": > > Der Sender sendet immer gleichzeitig einen US-Burst und > ein Funksignal. Der Empfänger dreht das Richtmikrofon > so lange, bis er erstmal irgendwas hört. Dann gleicht > er den Seitenwinkel so lange fein ab, bis die empfangenen > US-Bursts links und rechts genau GLEICHZEITIG eintreffen. > Jetzt liegt der US-Sender genau auf der Mittelsenkrechten; > der Seitenwinkel ist jetzt also bekannt. > > Die Schrägentfernung ergibt sich aus dem Laufzeitunterschied > zwischen Blitz und Donner... sprich: zwischen Ultraschall > und Funk. Die Sache ist auch simple. Der Unterschied meiner Methode ist nur, dass ich nur 1-2 Messungen mache und dann Seitenwinkel und Entfernung berechnen kann. Das ist auch alles nicht das Problem das ich habe (das bisschen Mathe schaff ich). Ich habe nur erklärt wie ich es einsetzen möchte, und welche Hintergrund meine Frage hatte. Mein Problem ist: Ich finde keine Module/Bauteile/Bauelemente die ich an meinen Atmega anschliessen kann und dann auf der einen Seite das Schall-Signal senden kann und auf der anderen Seite das Schall-Signal empfangen kann. Ähnlich dem HC SR04 nur mit grösserer Reichweite und Sender/Empfänger getrennt. Ggf. noch ohne Singaldetektionsschaltung. Ich hab gehofft jemand hat so etwas schon gesehen und kann mir eine Bezugsquelle dafür nennen (Bestellen im Internet). Siehe: Gabriel H. schrieb: > (...) > Im Grunde brauch ich "nur" einen Sender und Empfänger für (Ultra)Schall > den ich mit dem Atmega328p benutzen kann. Ich hab mir das in etwa so > vorgestellt: > - Am Sender über PWM den "Ping" senden > - Am Empfänger das Signal über den ADC-Samplen und Signale auswerten. > oder: > - Sendermodul wird von Atmega gestartet, sender "Ping" automatisch > - Empfängermodul detektiert "Ping" selbstständig und setzt Pin auf > High/Low auf den ich dann mit dem Atmega reagieren kann. >(...) kommt :) Wolfgang schrieb: > Gabriel H. schrieb: >> ... und ich erinnere mich das Photodetektoren allgemein sehr träge sind. > > Das kommt drauf an, was du als "träge" bezeichnest. Ein Lidar läuft mit > Photodetektoren und da entspricht eine Entfernung von ein Meter etwa 7ns > (0.000000007s). Wenn damit auf Millimeter genau gemessen wird, werden > also Signal noch auf besser als 10 Pikosekunden aufgelöst. Wieder was gelernt danke :), das bezeichne ich als nicht träge. Ich erinnere mich noch, dass wir in einer Vorlesung Helligkeitssensoren (Photodioden oder Photowiderstand) hatten die bis zu 20 Minuten gebraucht haben, bis sie ihren Widerstand auf die aktuelle Helligkeit angepasst hatten. Ich hab jetzt nochmal "gegoogelt" Photodetektoren ist ein Oberbegriff, darunter fallen dann Photodioden und vermutlich die aus dem Lidar genutzen CCD-Sensoren.
Gabriel H. schrieb: > - Entfernung zwischen S0 und R0 zwischen 0 m und ca. 15 m Vielleicht is 15m das Problem? Suche hier: http://www.maxbotix.com/articles/108.htm
Geert H. schrieb: > Gabriel H. schrieb: >> - Entfernung zwischen S0 und R0 zwischen 0 m und ca. 15 m > > Vielleicht is 15m das Problem? > Suche hier: http://www.maxbotix.com/articles/108.htm Ja die 15m sind ein Problem. Die XL-MaxSonar®-EZ™Serie kenne ich, leider habe ich mit diesen das selbe Problem wie mit den HC SR04. Die MaxSonar-Sensoren haben die Auswertunglogic/Schaltung bereits integriert. Sprich: Man hält Pin 1 low, dann sendet der Sensor seinen Pulse und anschliessend misst man die Dauer des High-Pulses an Pin 2. Anhand dessen (58uS per cm) rechnet man die Entfernung um. Beim HC SR04 geht die Ansteuerung vom Prinzip genau so. Ich will praktisch 2 unterschiedliche Bauteile: - eines zum Aussenden des Pulses - eines zum Empfangen des Pulses Zu den 15m nochmal, ich ging davon aus wenn man es schafft einen Ultraschallsensor zu bauen der für 7,6m (gibt ja auch welche mit 10m) funktioniert. Und dabei einen Pulse aussendet der: 7,5m zurücklegt, reflektiert wird, dann wieder 7,5m zurücklegt und noch registriert wird zu bauen. Muss es doch auch möglich sein einen Pulse/Ping etwa 15m weit zu senden (Ist ja nur 2 * 7,5m, die Reflexion entfällt).
Wolfgang schrieb: > den Winkel E1-R0-S0 zu messen Der sich aber so einfach nicht messen lässt. Die Empfänger haben eine breite Empfangskeule.
eric schrieb: > Der sich aber so einfach nicht messen lässt. Mit einem Laser (20ct Modul), der auf eine Plattform dreht, wäre das kein Problem, wenn sicher gestellt wäre, dass alles in einer Ebene statt findet. In Hamburg hatten die ein ähnliches Problem - Ortung im Meter-Bereich auf Millimeter. http://www.miniatur-wunderland.de/anlage/technik/schiff-system/steuerung/
Versuch macht kluch. Warum fragst Du erst lange ? Ultraschallkapseln 25 oder 40 kHz gibt's billig im Netz. Eine Schaltung zur Anregung auf der Eigenresonanz findest Du bei Beitrag "Oszillator basteln (3-10Mhz)" Dein Controller muss den Oszillator nur impulsweise ansteuern. Der Empfänger ist simpel. NF-Verstärker diskret oder mit OPV. Ausgewertet wird die Vorderflanke des Empfangsimpulses, dahinter kommen noch jede Menge Reflexionen der Umgebung. Die ganze Sache kostet noch nicht mal 10€.
Danke eric für den Input. Wie gesagt, ich hab mit E-Technik eigentlich nicht wirklich was zu tun, daher sehen manche Fragen vielleicht trivial/blöd aus für dich. Ich jetzt ein bisschen was recherchiert und hoffe du kannst mir jetzt nochmal weiterhelfen. eric schrieb: > Versuch macht kluch. Ich stimme zu, aber es kostet auch Zeit. Man muss das Rad ja nicht jedes mal neu erfinden. > Warum fragst Du erst lange ? Weil ich dachte es ist so einfach (für dich ist es das ja auch =) ) und es gibt so etwas schon fertig zu kaufen. Blos hab ich nichts gefunden daher wollte ich hier nachfragen. > Ultraschallkapseln 25 oder 40 kHz gibt's billig im Netz. Das hier ist ein Sensor, geht der auch als Sender? http://www.conrad.de/ce/de/product/507761/Ultraschall-Sensor-KPUS-40FD-14TR-K766-40-kHz-x-H-14-mm-x-9-mm/?ref=detview1&rt=detview1&rb=1 Oder muss es unbedingt eine Kapsel sein wie: http://www.conrad.de/ce/de/product/506195/Ultraschall-Kapsel-Murata-MA40S4S-Ultraschall-Sender-40-kHz-x-H-99-mm-x-71-mm > Eine Schaltung zur Anregung auf der Eigenresonanz findest Du bei > Beitrag "Oszillator basteln (3-10Mhz)" > Dein Controller muss den Oszillator nur impulsweise ansteuern. Ich hab versucht das zu begreifen, mein Wissen in E-Technik reicht nicht aus um die Schaltung gänzlich zu lesen und zu begreifen. Ich kann sie deswegen auch nicht auf meine Spannungen (3.3V) anpassen. Ist das vom Prinzip das hier? https://de.wikipedia.org/wiki/Clapp-Schaltung An G kommt ein uC2 Pin hin, der PWM-Signale erzeugen kann, damit wird der Schwingkreis dann angeregt. Dann wähle ich L1=120uH und C1=205nF und über Thomsonsche Schwingungsgleichung komm ich etwa auf meine 40 kHz (Bauteiltoleranzen) > Der Empfänger ist simpel. NF-Verstärker diskret oder mit OPV. OPV wie hier? https://de.wikipedia.org/wiki/Operationsverst%C3%A4rker#/media/File:Noninverting_Amplifier.svg - bei Ue die Ultraschallkapsel einbauen - R2 / R1 Verhältnis richtig wählen (je nach gewünschter Verstärkung) - bei Ua kommt ein ADC-Pin von uC2 hin (ggf. noch einen Vorwiderstand einbauen) Hab ich das richtig verstanden? > Ausgewertet wird die Vorderflanke des Empfangsimpulses, > dahinter kommen noch jede Menge Reflexionen der Umgebung. Damit hab ich gerechnet. > Die ganze Sache kostet noch nicht mal 10€. So hab ich das gehofft.
{kind=link}
Oweh, Oweh !
Was Hab ich im genannten Thread 'Oszillator ...' gesagt:
Zuviel Digitaltechnik vernebelt den Blick für die reale analoge Welt!
Wenn Du wirklich so wenig von Elektronik weisst,
wird es schwierig, Dir jeden Handgriff zu erläutern.
Bitte lies meine dortigen Beiträge genauer,
dann brauchst Du manches nicht zu fragen
und ich muss es nicht immer wiederholen.
Da Du anscheinend im Garten experimentieren willst,
sollten es geschlossene Kapseln sein,
die weniger leicht in feuchter Atmosphäre korrodieren.
> Ist das vom Prinzip das hier?
Wie kannst Du so fragen? Das sieht doch völlig anders aus!
Die von mir angegebene Schaltung habe ich kurz
und Jörg Wunsch ausführlich erklärt.
Es setzt allerdings ein bisschen Kenntnis von CMOS-Logikbausteinen
voraus.
Mit 3.3V Versorgungsspannung bei 40 kHz wird es knapp
mit der Reichweite, vor allem wenn das Ding im Gras liegen soll,
aber das muss man probieren.
Auf höhere Spannung kann man immer noch gehen.
Als Empfänger nimm für den Anfang einen OPV mit Grenzfrequenz
von ein paar MHz, sonst kriegst Du bei 40kHz zu wenig Verstärkung.
Schaltung als nichtinvertierender Verstärker.
Wie groß soll die Mindestentfernung sein ?
Die Anwort ist wichtig für den Aussteuerbereich,
die Triggerschwelle und den Messfehler.
Grundsätzlich: Die Sache wird nur dann etwas,
wenn Du Dir Mühe gibst, es richtig zu verstehen
und nicht einfach blind nachzubauen.
Erstmal: eric, danke für deine Bemühung (Zeit und Nerven). Und natürlich an alle Anderen die sich mein Problem angeschaut haben und gepostet haben. eric schrieb: > Oweh, Oweh ! > Was Hab ich im genannten Thread 'Oszillator ...' gesagt: > Zuviel Digitaltechnik vernebelt den Blick für die reale analoge Welt! > Wenn Du wirklich so wenig von Elektronik weisst, > wird es schwierig, Dir jeden Handgriff zu erläutern. Ich denke ich finde jemand, der mit die Einzelheiten erläutern kann. > Bitte lies meine dortigen Beiträge genauer, > dann brauchst Du manches nicht zu fragen > und ich muss es nicht immer wiederholen. Bei manchen Beiträgen verstehe ich noch nicht mal 30% das wird noch ein langer Weg. Da alles für mich recht unverständlich war wollte ich eben etwas fertig haben. > Da Du anscheinend im Garten experimentieren willst, > sollten es geschlossene Kapseln sein, > die weniger leicht in feuchter Atmosphäre korrodieren. Ja werd ich machen. >> Ist das vom Prinzip das hier? > Wie kannst Du so fragen? Das sieht doch völlig anders aus! > Die von mir angegebene Schaltung habe ich kurz > und Jörg Wunsch ausführlich erklärt. > Es setzt allerdings ein bisschen Kenntnis von CMOS-Logikbausteinen > voraus. Noch nie etwas damit gemacht, wird wie gesagt ein langer Weg. > Mit 3.3V Versorgungsspannung bei 40 kHz wird es knapp > mit der Reichweite, vor allem wenn das Ding im Gras liegen soll, > aber das muss man probieren. > Auf höhere Spannung kann man immer noch gehen. > > Als Empfänger nimm für den Anfang einen OPV mit Grenzfrequenz > von ein paar MHz, sonst kriegst Du bei 40kHz zu wenig Verstärkung. > Schaltung als nichtinvertierender Verstärker. Ich werde erstmal was zu OPVs durchlesen damit ich besser verstehe auf was ich bei der Auswahl achten muss, dann suche ich mir einen aus mit ein paar MHz. > Wie groß soll die Mindestentfernung sein ? > Die Anwort ist wichtig für den Aussteuerbereich, > die Triggerschwelle und den Messfehler. Im Optimalfall liegt die Mindestentfernung bei 35 cm, 1 Meter wäre schon nicht mehr so schön. Bis 2 Meter kann ich sogar mit den HC SR04 den Vektor bestimmen, also kann ich auch 2 verschiedenen Typen von Sensoren einfach nehmen (bis 2 Meter, von 2 bis 15 Meter). > Grundsätzlich: Die Sache wird nur dann etwas, > wenn Du Dir Mühe gibst, es richtig zu verstehen > und nicht einfach blind nachzubauen. Ich werde jetzt folgendes machen: Mir einen OPVs raussuchen und mir einen Empfänger basteln. Den Empfänger teste ich anschließend einfach mal, in dem ich einen HC SR04 ein Signal aussenden lasse (und vom HC SR04 die Auswertung ignoriere). Dann brauch ich die Oszillatorschaltung erstmal nicht. Und wenn ich damit zufrieden bin kann ich immer noch einen MB1260 ( http://www.maxbotix.com/Ultrasonic_Sensors/MB1260.htm ) kaufen und mit dem das selbe Spiel wie mit dem HC SR04 treiben.
Gabriel H. schrieb: > MB1260 Wer hat Dir denn DEN Vogel eingeredet ? Das Ding - ist nicht wasserdicht - misst Echoverfahren, also nicht S --> E - kost 'nen Fuffi !!! und vorhin warst Du glücklich, als ich sagte höchstens 10€. Ich habe grad mal nachgesehen, die Preise sind etwas gestiegen, aber noch erträglich. Die richtigen Ultaschallkapseln für Dich sind Murata MA40E7S als Sender und MA40E7R als Empfänger 40 steht für 40kHz und E für waterproof. Näheres bei http://www.online-electronics.com.ua/uploads/tdpdf/zdMURATA_Ultraschall-Sensor-MA_EN.pdf http://www.produktinfo.conrad.com/datenblaetter/500000-524999/506193-da-01-en-ULTRASCHALL_SENSOR_MURATA_MA40S4R.pdf Den Sender kannst Du auf Steckbrett aqufbauenaufzubauen ist das einfachste der Welt: MA40E7S + 1 CD4011B DIL + 2R + 1C
Ich weiss nicht, warum dieses blöde Schreibprogramm plötzlich mitten im Text gepostet hat. Ich war es jedenfalls nicht und da ich als Gast nicht editieren kann muss ich den Schluss hier bringen: Als Hilfsmittel solltest Du Labor-Steckbretter und ein Oszilloskop haben, sonst machst Du Dir das Leben schwer. Der Empfänger ist auch nicht sehr viel komplizierter. Details ein ander Mal.
Ich sehe gerade, dass die Murata-Produktion eingestellt oder verkauft ist. Da muss ich mich erst mal schlau machen. Näheres ein andermal.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.